基于图像处理的电缆护套厚度精密测量*
2013-12-29王吉林
王吉林,赵 力
(1.盐城工学院信息工程学院,江苏盐城224051;2.东南大学信息科学与工程学院,南京210096)
随着国家加大基础设施等方面的投入,每年对电线电缆的需求呈几何级数增长,这势必对电缆质量检测提出更高要求。基于计算机视觉的图像测量系统,综合运用了电子学、光电探测、图像处理和计算机技术,将机器视觉引入到检测中,实现对电缆护套材料厚度的的非接触式智能化检测,具有非接触、速度快、柔性好等突出优点,只要选用足够高精度的镜头和图像传感器以及合适的图像处理算法,就可以实现高精度测量,从而降低检测成本并且能够提高产品质量。本文就该测量系统涉及到的图像处理、高精度测量等技术问题进行了深入的研究。
1 电缆护套厚度测量系统及其标定
高精度图像测量系统主要由照明系统、光学系统、CCD摄像机、图像处理系统、计算机及其外设五大部分组成。由光学测量系统、图像输入设备和计算机,在线非接触式地获取大量的被测物体的原始图像,应用边缘检测算子对原始图像进行处理,检出图像的边缘点数据并进行数据处理,从而获得物体图像的几何参数,并应用标准样块零件对系统进行标定,从而获取高精度的测量结果。
图像采集卡采集的电缆护套切片图将用计算机做一系列图像处理,最终得到图片特定区域厚度参数。测量系统图像处理步骤为:图像预处理→边缘检测→轮廓提取→角点判别→角点亚像素重定位→边缘亚像素重定位和图像边缘特定部分距离计算等。其中:角点检测,一幅图像最为重要的信息在边缘角点附近,但是由于其特殊性,对角点像素点的精确定位与一般边缘处理不同,为此需要在像素级边缘点集中判别出角点和非角点边缘点,然后分别对这两类边缘像素点精确定位;边缘亚像素重定位,图像分割后提取的边缘坐标表示了在此一个像素范围内存在边缘,边缘亚像素重定位算法就是要在这个粗略范围内精确定位边缘的位置,这是图像检测中的重点和难点;测量边缘特定区域距离和电缆护套厚度计算,根据国标规定,一个电缆护套厚度的最小厚度和最大厚度有精度要求,为此此步骤目的是在边缘坐标集中找出相应的像素点,并测量这些点的距离参数,进而根据系统标定参数求出实际电缆护套的厚度。
在构建好硬件系统后需要进行系统标定工作,就是确定现实物体的三维坐标到图片以像素为单位的二维坐标的映射关系。而后依据测量系统图像处理步骤按国标GB/T 2951.1-1997[1]规定的电缆护套厚度测量位置在二维图片中找到并计算两个电缆护套边缘间距。
物体通过CCD光学镜头成像原理如图1(a)所示,实物尺寸为s,通过CCD成像系统生成的像尺寸为n,则物像之间关系为s/n=K,其中K是标定系数,单位是mm/pixel。
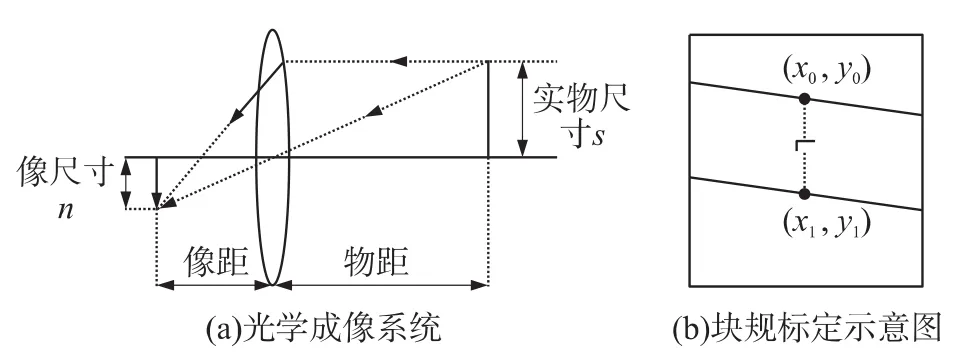
图1 系统标定图示
本文采用一种通过标准块规(经过标准测量的物体)来计算标定系数的方法。在图像测量系统的工作距离与照明确定之后,将块规置于工作台上,采集块规图像,对图像进行后续的图像处理,通过测量标准块规的图像中的对应尺寸来获得测量系统的标定系数。测量原理如图1(b)所示。图中L为两平行线之间的距离,也就是块规的厚度。计算出所代表的像素数N,就可以获得标定系数K=L/N。设与两条平行线的交点分别是(x0,y0),(x1,y1),则L所代表的像素数为N=。为对系统进行精确标定,可在摄像机视场内不同方位对标定标准件进行多次标定,然后求其均值作为最终的标定系数。这样既可消除镜头畸变引起的误差又可去掉标定过程引入随机误差。
对于电缆护套厚度测量位置,国标GB/T2951.1规定了电缆的聚合物绝缘体和护套材料的厚度尺寸的测量方法及机械性能实验方法。本文选取的测量对象如图3(a)所示的电缆护套横截面形状。
2 电缆护套厚度检测环节与分析
对输入系统的电缆护套切片灰度图进行预处理,首先进行自适应分级中值滤波去除椒盐噪声[2],然后用改进Gabor增强算法增强图中边缘与背景对比度以消除图像采集传输过程中受到的高斯模糊影像[3,4],得到目标区域与背景之间有明显差别的电缆护套灰度图Ig。对Ig用8个Sobel模板分别卷积待测图片,选取其中最大的卷积值为该像素点处梯度幅值,相应的模板方向为该像素点处梯度方向。同时从Ig中用改进的Canny边缘检测[5]处理得到只有边缘和背景的二值图,再通过轮廓提取把电缆护套切片图中的边缘像素级坐标提取出来,用八方向链码表表示为E。改进的CSS角点判别器从E中找出角点和非角点边缘像素点。利用边缘亚像素重定位算法对其进行精确定位,文中提出的基于形体质心边缘亚像素重定位算法利用计算出的八方向Sobel梯度,把角点和非角点亚像素级精确坐标集组合为表示电缆护套内、外边缘位置的坐标集,用两个电缆护套内、外边缘精确位置坐标集计算3个最大间距和3个最小间距,再乘上标定系数得到国标规定测量的电缆护套6个厚度值。
2.1 边缘粗定位及边缘像素点像素级坐标提取
用改进的Canny边缘检测算法对预处理后的标准电缆护套切片图进行边缘检测,算法参数为:高斯模板标准方差为1,高阈值比率(非极大值抑制后梯度值大于高阈值像素数占非零梯度像素数比率)设定为0.2,高低阈值之比设为0.8。改进Canny边缘检测器输出了只有电缆护套切片图边缘和背景的二值图(如图2(a)所示),然后使用轮廓跟踪算法提取出电缆护套内、外两条边缘点集,图2(b)显示了轮廓提取结果。图中可以看出,改进Canny边缘检测器输出的电缆护套切片图边缘是连续单像素的,效果很好。
2.2 角点判别与亚像素级坐标提取
Mokhtarian把角点定义为目标轮廓线上曲率大于某一个阈值的局部最大值点。Mokhtarian等提出的 CSS(Curvature Scale Space)算法[6]是在大尺度(Scale)下检测候选角点,然后从大尺度到小尺度跟踪并定位角点,以实现角点在小尺度下的精确定位。Mokhtarian提出的CSS角点检测主要有两个问题:一是获取候选角点使用了全局阈值;二是检测角点使用了较大的尺度,这都容易导致真实角点丢失或容易导致伪角点的出现。本文电缆护套厚度检测系统对图片进行角点判别的目的并不是要求对角点的精确定位,而是判别出所有角点附近曲率偏大的尽可能多的边缘点。因此多个尺度曲率相乘的改进方法并不适合本文系统,相反的对于单一尺度计算的曲率曲线在峰值附近曲线更加平缓,可以预见的是,只要阈值和尺度选取合适,边缘角点附近曲率较大的边缘点都可以从角点判别器中输出。
图3(a)白色方框所示之处为系统对电缆护套切片图的边缘使用改进的CSS角点判别提取的角点(边缘曲率较大像素点)。图3(b)显示了图3(a)中标示的3个角点的像素级坐标(图3(b)中带‘*’号实线标示),而带‘○’虚线表示经角点亚像素重定位算法处理后所提取的角点亚像素级坐标位置。
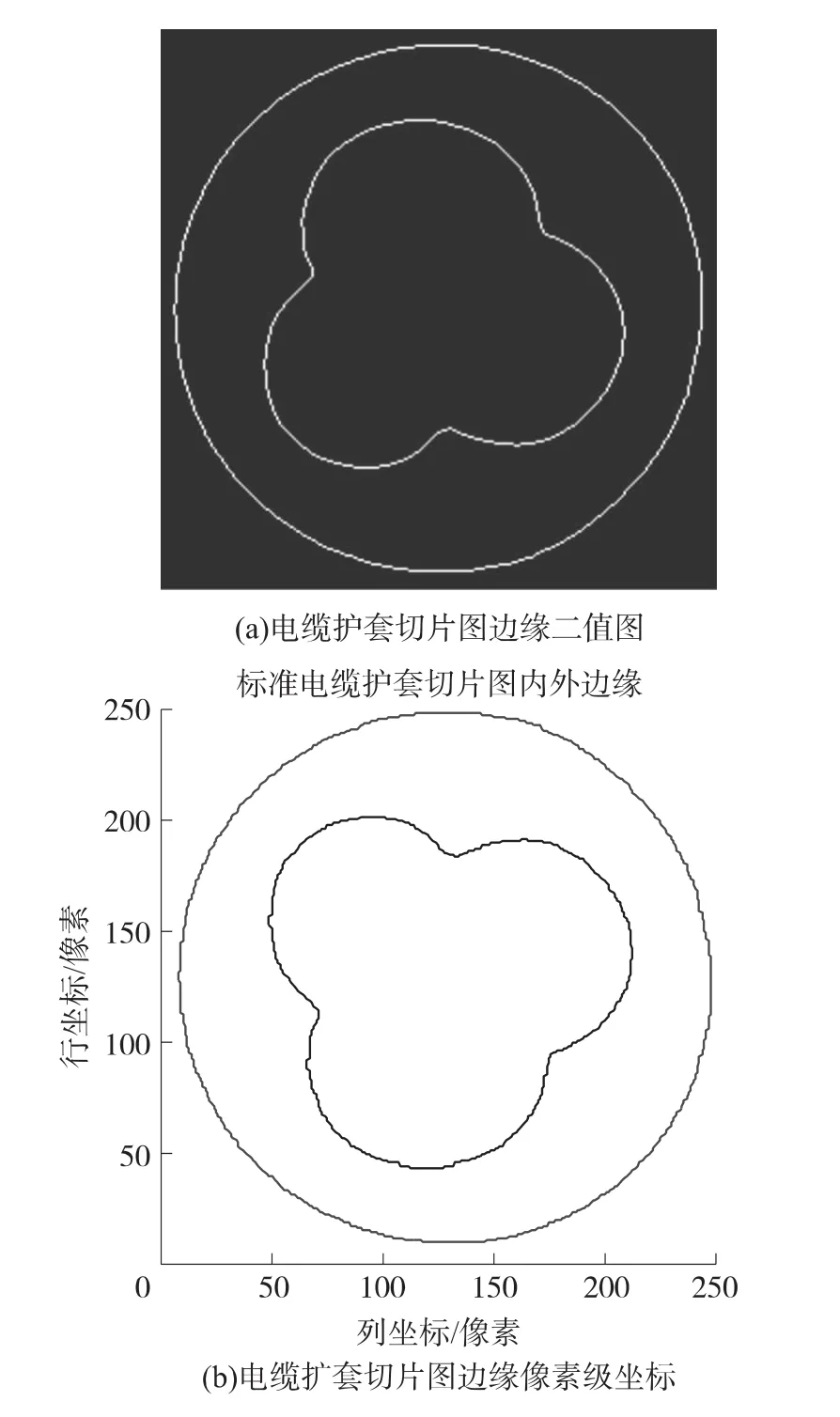
图2 改进Canny边缘检测、轮廓跟踪结果图
2.3 边缘像素点亚像素重定位
图像亚像素重定位技术就是在边缘检测器确定的一个像素大小的区域范围内精确定位边缘位置。在对基于ZOM(Zernike Orthogonal Moment)的边缘亚像素重定位算法[7]及基于多尺度梯度的二次插值边缘亚像素重定位算法[8]等比较研究的基础上提出一种新的基于形体质心思想边缘亚像素重定位算法对像素级电缆护套切片图边缘坐标集进行亚像素级的精确重定位。
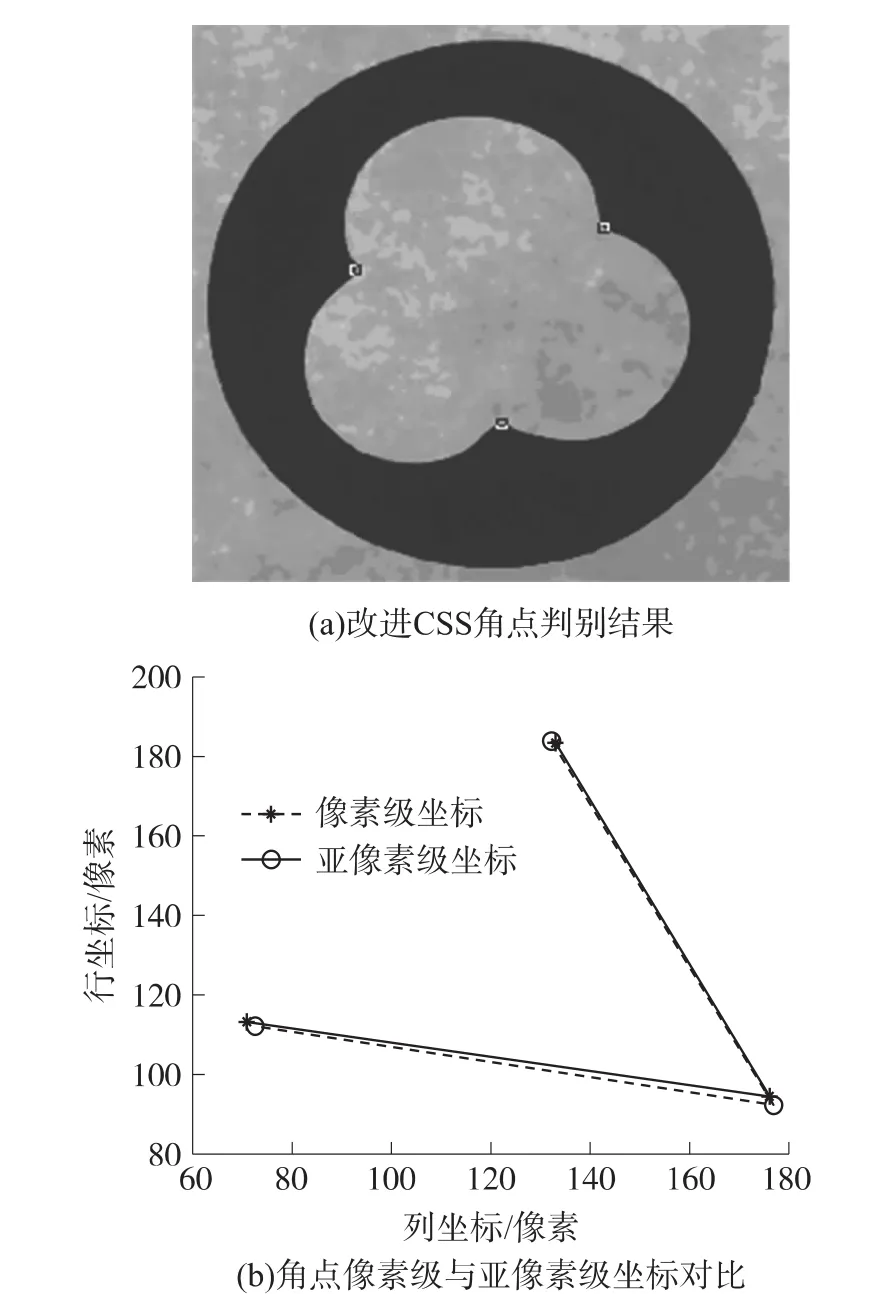
图3 系统对电缆护套切片图角点判别与精确定位效果图
2.3.1 算法推导
根据实际采集的数字图像边缘模型给出一维阶跃型边缘f(x)如式1,其中u(x)为理想阶跃函数,g(x)为高斯函数。
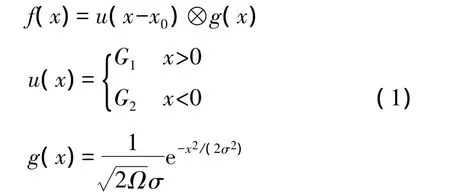
对f(x)求导得f'(x)=m·g(x-x0),m=G1-G2。
因为g(x)为偶函数,即g(x)=g(-x),则有:
式中,R(x)为x处梯度值。
假设有像素级边缘点(x0,y0),其梯度方向为,现在以点(x0,y0)为坐标原点,以为x轴正方向建立一维坐标,如图4所示,在此一维坐标上计算出亚像素边缘点距像素级边缘点的偏移值Δs。图4(a)中是此像素级边缘点(x0,y0)位置,相应的图4(b)为计算偏移值的坐标,图中R0、R+1、R-1为点(x0,y0)的梯度方向上相邻的像素梯度值,n=1时代入式(4)中得到Δs。
式中α是像素级边缘点梯度方向角,由此偏移值就可以对像素级边缘点坐标进行亚像素重定位,即:

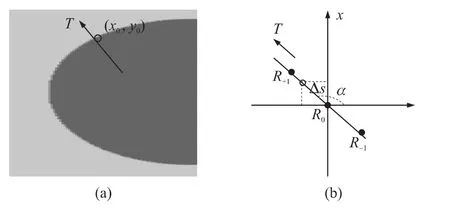
图4 形体质心法亚像素重定位算法示意图
2.3.2 算法流程
上述所推导的亚像素重定位算法是建立在已知像素级边缘点坐标的基础上的,可以用改进的Sobel算子法得到像素级边缘点坐标。这样做一方面可以利用经典的算子法简单高效的特点确定边缘像素点的像素级坐标,这比直接确定亚像素坐标点要快速且有较好的鲁棒性;另一方面是可以利用扩展的八方向Sobel算子计算出较为准确的图像梯度图,可以很好的与亚像素重定位算法相结合。算法的具体步骤如下:
(1)对输入图像I预处理后,利用扩展的八方向Sobel模板计算其梯度图G与方向图T。
(2)选取阈值t,并按单边缘检测方法确定图像像素级边缘点集E。
(3)遍历边缘点集E,对每一个像素级坐标依照公式(4)计算亚像素坐标点距像素级坐标点的偏移距离 Δs。
(4)由公式(5)对像素级坐标点集E进行亚像素重定位,得到亚像素级边缘点集。
为验证本文算法的鲁棒性和抗噪性,一是在无噪情况下对不同输入图片进行亚像素重定位,研究多次测量中的误差波动情况,二是在有噪情况下,研究噪声对算法检测精度的影响。在计算机生成的模拟图像中加入不同强度高斯白噪声和椒盐噪声,算法检测的误差随着信噪比的增加呈下降趋势。模拟图在无噪情况下测试的相对误差为0.2%,在信噪比小于80 dB以后误差随噪声的增加急剧上升,但是当信噪比降低到一定程度以后,误差也趋于稳定,这就说明只要像素级边缘检测算法在抗噪能力上得到保障,本文亚像素重定位算法可以有较好的抗噪性能。
2.4 电缆护套厚度计算
根据国标规定,诸如图5所示形状的电缆护套需要测量3个最大厚度和3个最小厚度,其中A~F直线标示了此类型电缆护套所需测量厚度的位置。3个最小厚度和3个最大厚度的测量方法如下:
(1)遍历内边缘点集中每个边缘点,求与该坐标点距离最小的外边缘点集中的坐标点,则该距离为内边缘点集中该点的厚度;
(2)遍历外边缘点集中的每个边缘点,求与该坐标点距离最小的内边缘点集中的坐标点,则该距离为外边缘点集中该点的厚度;
(3)对内、外边缘点集中每个坐标点的厚度查找最小厚度A和最大厚度D;
(4)针对A和D所在位置分别向前后移动1/6起点,在1/3范围内查找厚度最小点B、C和厚度最大点 E、F。
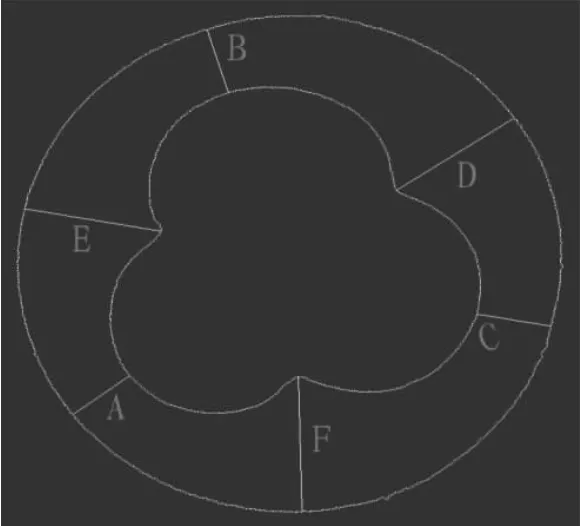
图5 电缆护套所需检测的最大与最小厚度位置标示
用本文提出的亚像素边缘重定位后边缘亚像素坐标集计算如图5中的六个厚度,结果如表1。
本电缆护套厚度测量系统硬件标定的系数K为0.156 8 mm/pixel,乘以以像素为单位的厚度,得到电缆护套6处地方测量厚度值,如表2所示。
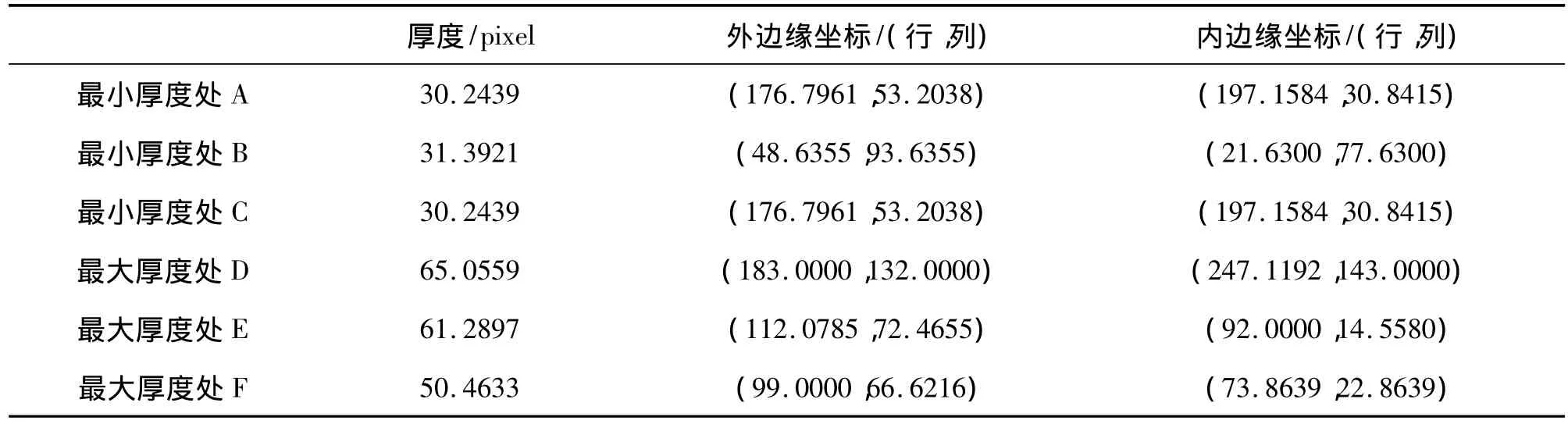
表1 基于形体质心思想亚像素重定位计算的电缆护套6处厚度(单位:像素)
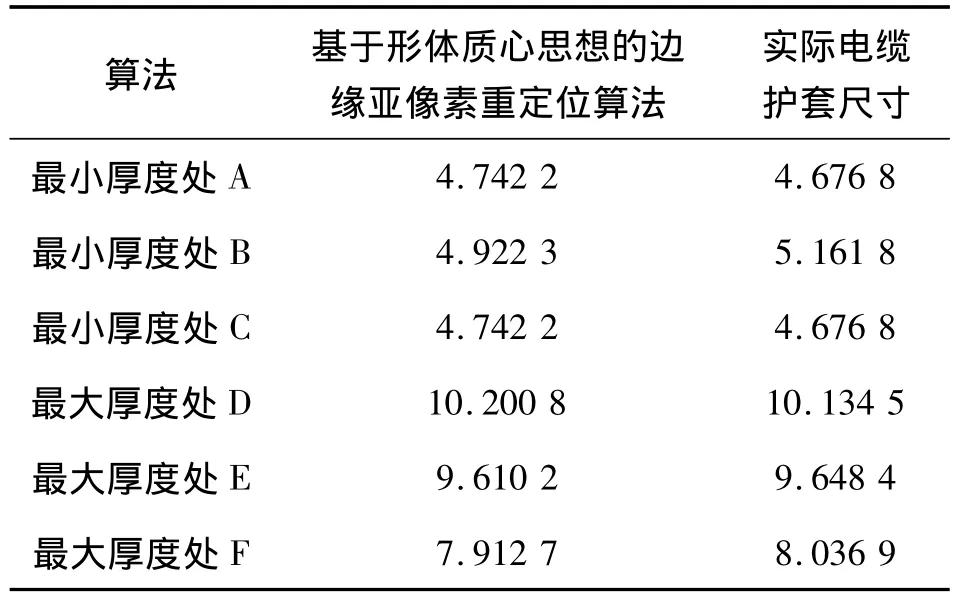
表2 亚像素重定位算法提取边缘计算的电缆护套6处厚度值(单位:mm)
计算亚像素重定位提取的亚像素边缘坐标得出电缆护套厚度,与真实的标准电缆护套厚度进行比较,计算它们的相对误差,由基于形体质心思想的边缘亚像素重定位算法输出的边缘坐标计算的厚度误差较小,相对误差均值在1.67%。
3 结论
介绍了电缆护套厚度测量系统构成及其图像处理流程后给出了基于图像亚像素处理的电缆厚度测量方法与步骤。在对基于ZOM的边缘亚像素重定位算法及基于多尺度梯度的二次插值边缘亚像素重定位算法等比较研究的基础上提出一种新的基于形体质心思想边缘亚像素重定位算法对像素级电缆护套切片图边缘坐标集进行亚像素级的精确重定位。以标准电缆护套切片图片检验系统厚度测量的效果,验证了算法在性能上的优越性。
[1]中华人民共和国国家标准.电缆绝缘和护套材料通用试验方法[P].中国:GB/T 2951.1-1997,1997,10,28.
[2]金良海,李德华.基于噪声检测的图像去噪算法[J].模式识别与人工智能,2008,21(3):298-302.
[3]翟永前,乔建,赵力.基于简化Gabor小波的人脸识别算法研究[J].电子器件,2012,35(6):687-691.
[4]董鸿燕,沈振康.自适应模糊边缘减宽增强算法[J].中国图象图形学报,2009,14(2):255-259.
[5]陈彦燕,王元庆.常用边缘检测算法的定量比较[J].计算机工程,2008,34(17):202-204.
[6]Mokhtarain F,Suomela R.Robust Image Corner Detection Through Curvature Scale Space[J].IEEE Trans.on Pattern Analysis and Machine Intelligence,1998,20(12):1376-1381.
[7]高世一,赵明扬,张雷,等.基于Zernike正交矩的图像亚像素边缘检测算法改进[J].自动化学报,2008,34(9):1163-1168.
[8]Jensen K,Anastassiou D.Subpixel Edge Localization and the Interpolation of Still Images[J].IEEEE Trans Image Processing,1995,4(3):285-295.
