基于ADAMS的蓝莓果实收获碰撞仿真与分析
2013-12-29鲍玉冬郭艳玲
鲍玉冬,郭艳玲,张 慧,郭 帅
(东北林业大学机电工程学院,黑龙江哈尔滨150040)
基于ADAMS的蓝莓果实收获碰撞仿真与分析
鲍玉冬,郭艳玲,张 慧,郭 帅
(东北林业大学机电工程学院,黑龙江哈尔滨150040)
振动式蓝莓采摘机采摘蓝莓的过程中,果实发生跌落碰撞。果实收获过程中的碰撞分析对预测和评价果实质量具有重要的作用。本研究结合国内研发的蓝莓采摘机的结构,分析了蓝莓果实跌落的轨迹和碰撞过程,得到了碰撞接触力公式。根据采摘机和蓝莓果树的参数,用ADAMS对采摘机和果实进行了简化建模,并进行了碰撞仿真,得到了碰撞接触力大小的范围。根据已经得到的接触力计算公式,可以用接触力大小来预测和评价收获到的蓝莓果实的质量。
林业机械;振动式蓝莓采摘机;蓝莓果实;果实收获;果实碰撞;ADAMS;仿真
蓝莓被农业专家预测为最具潜力的果树品种,其果实被国际粮农组织列为五大健康食品之一,蓝莓果的需求量一直处于供不应求状态[1-3]。国外,美国大量种植蓝莓,也是最早研制出蓝莓采摘机的国家,对蓝莓采摘的关键技术做了大量研究[4-5]。国内,东北林业大学研制出了振动式蓝莓采摘机,蓝莓果实在采摘的过程中发生跌落及碰撞,不同程度上造成机械损伤,果实的损伤程度直接影响到果品的质量,因此对蓝莓果实收获过程中碰撞的研究具有重要的意义。农林机械的作业环境受果实成熟期、作业环境等外部因素影响较大,需要充分考虑机械本身所处的实际环境,基于ADAMS的虚拟仿真技术,可以大幅度的节省物理样机制造和试验的费用,也可以不受时间和环境等因素的限制进行试验研究。
蓝莓果实在采摘机工作的过程中不可避免的发生碰撞,本研究结合蓝莓采摘机的机械机构以及蓝莓植株的生长特性,对果实的运动轨迹和碰撞过程做了分析,得到了接触力计算公式,并使用ADAMS进行了仿真试验,试验结果可以通过接触力计算公式用来评价蓝莓果实的碰撞损伤程度,同时为蓝莓采摘机结构和材料的改进等提供理论依据。
1 果实运动的轨迹及接触力分析
1.1 采摘机的工作原理及果实跌落轨迹
本研究以国内振动式蓝莓采摘机为研究对象,如图1所示,采摘机为龙门式结构,工作时“骑”着果树行进,车体底部对称安装倾斜接果板,与树干接触后会旋转避开树干,经过树干后,在弹簧恢复力的状态下恢复至原来位置[6]。车体内安装的振动棒将机械振动传递给果树,成熟的果实在接受了外加的强迫振动后与树枝分离[7]。
图1 振动式蓝莓采摘机Fig.1 Vibration-blueberry picking machine
做平抛运动或斜抛运动的果实都可以看成是自由落体运动和其他运动的合运动,因此本研究研究中把果实的脱落都当成是自由落体运动,一侧果实运动的轨迹如图2所示。
图2 果实运动的轨迹Fig.2 Fruit movement trajectories after being cut and dropping to the collection bag
1.2 蓝莓果实碰撞力计算
假设蓝莓果实与接果板瞬时碰撞只发生法向变形,不发生切向变形。碰撞过程可以分为压缩阶段和回弹阶段。压缩阶段即果实与接果板接触到压缩到产生最大弹塑性变形的过程,回弹阶段即果实从弹性变形弹性恢复到残余塑性变形的过程[8]。
由Hertz的弹性碰撞理论[9],果实与接果板发生弹性碰撞时,接触区的应力分布函数p(r)和接触区半径r′分别为:

式(1)~(2)中,F为作用在接触区中心的集中载荷,与蓝莓凹陷深度有关;r为距接触区中心的距离;E′和μ分别为蓝莓果实的弹性模量和泊松比。
Johnson提出了接触区中心凹陷深度l与载荷F的关系[10]:

使果实变形达到弹性极限的碰撞速度为VM;接触中心的载荷为FM,此时果实的动能全部转化为果实的弹性应变能,即

式(7)中,m为果实的质量,rM为临界半径。
由(1)、(2)式得:
“安刘1”与“安刘2”典源与典义均不同:“安刘1”的典义已不再是其字面的 “安定刘氏江山”之义,而是变异成“维护王朝”(维护的对象可以是任何一个朝代,不再仅限于刘氏江山)之义了。典源是一个语典,即汉刘邦(高祖)病危时对吕后说:“周勃重厚少文,然安刘氏者必勃也。”“安刘2”的典义为字面义,即“安定刘氏江山”之义。典源是一个事典:指汉初商山四皓辅助太子,安定刘氏江山之事。后世用典者根据诗文创作语境与表情达意的需要从上述两个不同的典源中创造出了相同的典面“安刘”,这种相同只是偶然的相同,没有必然联系,所以“安刘1”与“安刘2”是同形典故词语。

式(8)中,σM为果实接触面屈服应力,可根据试验确定。
将(8)式代入(7)式,得
果实在回弹阶段起点由于塑性变形其曲率半径ρp大于弹性接触时曲率半径ρ,根据接触区半径都相等的原则,定义等效弹性集中力为Fe,由式(3)得

式(10)、(11)中,FM为达到最大凹陷深度时的集中力;lM为回弹前达到的最大凹陷深度。
由等效集中力得到回弹阶段集中力的计算公式为:

式(12)中,lp为回弹后果实的凹陷深度。
由(12)式可知,若已知果实在采摘过程中的碰撞力以及果实的弹性模量,即可知果实的变形及损伤程度。
2 基于ADAMS的果实碰撞仿真及分析
2.1 采摘机简化模型及果实模型的建立
由于蓝莓采摘机结构复杂,可以利用简化的模型进行虚拟仿真,降低硬件的要求,加快仿真速度[11-12]。根据蓝莓采摘机的实际结构及尺寸,在ADAMS中建立蓝莓采摘机的机构模型,并根据采摘机的材料设置模型材料类型,如图3所示。
图3 简化模型Fig.3 Simplif i ed model of picking machine
根据高丛蓝莓果实的平均质量和大小,把蓝莓果实简化为质量为3 g,直径为12 mm的刚性小球。ADAMS中的柔性体没有质量和惯性矩的概念[13-14],考虑到只需要掌握蓝莓果实的碰撞力大小,不考虑果实在碰撞过程中的变形,因此没有把蓝莓果实建立成柔性体。
结合高丛蓝莓的生长状况以及果树在采摘机内的空间位置,在采摘机模型内部布置6个果实模型,如图3所示,果实位置参数如表1所示。

表1 果实模型位置参数Table 1 Fruit location model parameter
2.2 定义碰撞接触
当果实与采摘机接触时,会在接触的位置产生接触力。在ADAMS/View中有两种计算接触力的方法,一种是补偿法,另一种是冲击函数法。补偿法需要确定两个参数:惩罚系数和补偿系数。惩罚系数确定两个构件之间的重合体积的刚度,接触力是惩罚系数与插入深度的乘积,若惩罚系数过小,就不能模拟两个构件之间的真实情况,若过大,会使计算出现问题,以至于不能收敛,所以选用辅助的拉格朗日扩张法,通过多步迭代来来解决这一问题[15]。
2.3 碰撞仿真及分析
设定仿真步长和时间,执行果实与采摘机的碰撞试验,共计5次,统计并整理实验数据平均值,如表1~表6所示。
通过表1~表6试验数据可知,跌落的果实平均碰撞6次,接触力在0.05~31.41 N之间,第一次碰撞接触力最大,接触力大小随着碰撞次数的增加而减小。
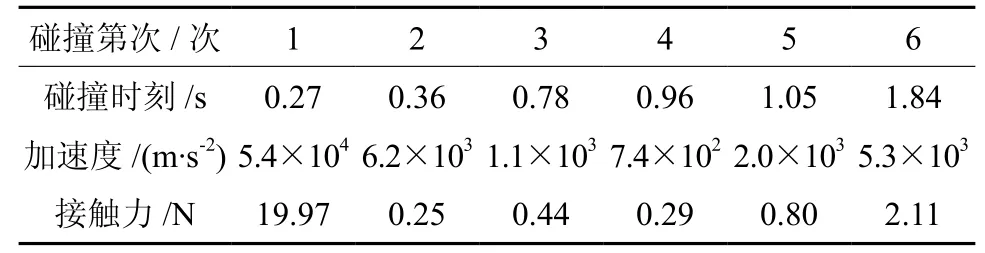
表2 1号果实碰撞试验数据Table 2 Practical collision test data of No.1 fruit
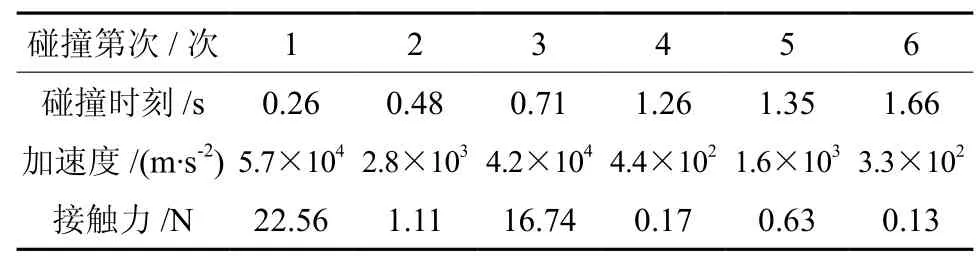
表3 2号果实碰撞试验数据Table 3 Practical collision test data of No.2 fruit
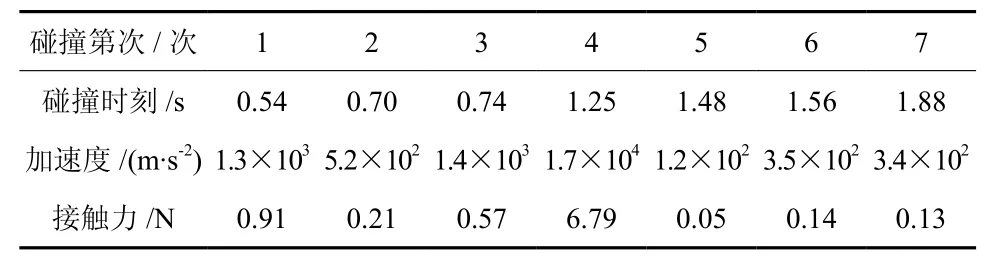
表4 3号果实碰撞试验数据Table 4 Practical collision test data of No.3 fruit

表5 4号果实碰撞试验数据Table 5 Practical collision test data of No.4 fruit
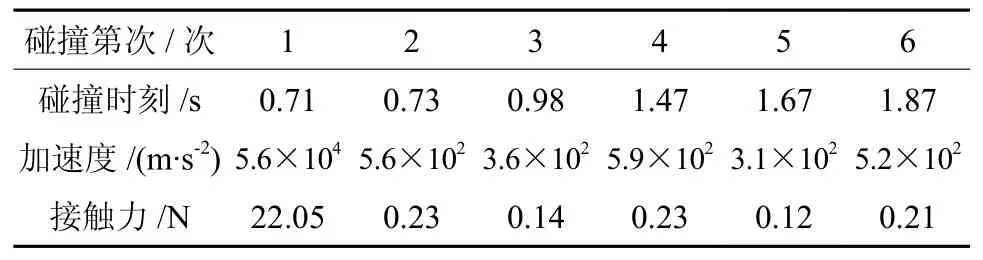
表6 5号果实碰撞试验数据Table 6 Practical collision test data of No.5 fruit
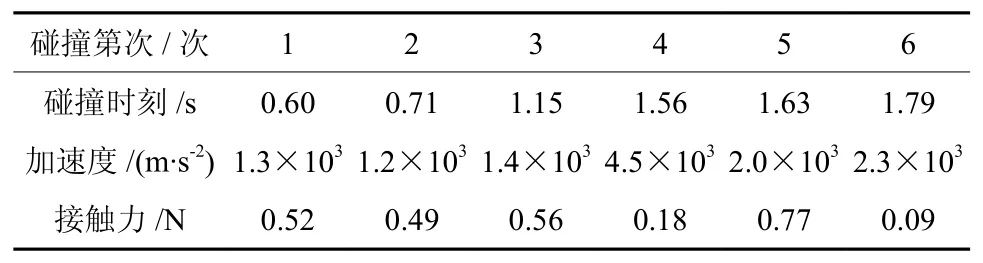
表7 6号果实碰撞试验数据Table 7 Practical collision test data of No.6 fruit
3 结 论
本研究根据国内振动式蓝莓采摘机的工作原理和内部结构分析了采摘过程中果实的运动轨迹,蓝莓果实在跌落的过程中发生碰撞,假设果实与接果板瞬时碰撞只发生法向变形,不发生切向变形。碰撞过程可以分为压缩阶段和回弹阶段。根据Hertz和Johnson的弹性碰撞理论分析,得到了果实碰撞的接触力计算公式,该公式可以用来预测和评价果实的损伤程度。
根据采摘机的结构及参数,使用ADAMS对采摘机和蓝莓果实进行简化建模。根据高丛蓝莓果树平均株高以及在采摘机内部的位置,选取6个位置布置蓝莓果实模型。
在ADAMS中进行碰撞仿真试验,记录试验数据并统计数据平均值,得到接触力在0.05~31.41 N之间,接触力大小随着碰撞次数的增加衰减。
由于对蓝莓采摘相关技术的研究有限,还有许多待研究的工作,如本研究涉及的内容。蓝莓果实接触碰撞力的分析中对果实变形的假设以及对仿真模型的简化,与真实情况尚有差距等。
[1]Strik B· Blueberry production and research treands in North America[J]. Acta Horticulturae, 2006, 715∶ 173-184.
[2] 史海芝,刘惠民.国内外蓝莓研究现状[J].江苏林业科技,2009,36(4)∶48-51.
[3] 董亚娟. 蓝莓产业或可成为发展县域经济的一个强机遇[J].农村实用技术 , 2010, 9∶6-8.
[4] 丁志祥. 国外果园的机械采收[J].世界农业,1995,(9)∶21-22.
[5] 蓝 峰,苏子昊,黎子明,等. 国内外果园采摘机械的研究及发展探讨[C]. 2010 国际农业工程大会论文集. 北京∶中国农业机械学会,2010.
[6] 李志鹏. 蓝莓采摘机采摘策略及行走轨迹规划研究[D]. 哈尔滨∶东北林业大学博士论文,2011.
[7]陈 度,杜小强, 王书茂,等.振动式果品收获技术机理分析机研究进展 [J]. 农业工程学报 ,2011,27(8)∶195-200.
[8] 杨海清,周小平. 边坡落实运动轨迹计算新方法[J]. 岩土力学 , 2009, 11(30)∶ 3411-3416.
[9]黄乐亭, 王金庄. 地表动态沉陷变形的 3 个阶段与变形速度的研究 [J]. 煤炭学报 , 2006, 31(4)∶ 420-424.
[10] 刘玉成, 曹树刚, 刘延保. 缓倾斜煤层矩形采空区地表沉陷盆地模型 [J]. 中国矿业 , 2008, 17(6)∶ 73-76.
[11] 郝双双, 李阳星, 刘训涛. 基于ADAMS的带式输送机实体仿真模型建立方法[J]. 煤矿机械,2008,29(2)∶178-180.
[12] 周宏兵 , 刘 锋 , 郝 鹏 ,等 . 挖掘机回转与动臂举升复合动作协调性的研究[J].中南林业科技大学学报,2011,31(10)∶ 158-162.
[13] 李楷模 ,文跃兵 . 基于 Adams 的锯齿螺旋轴优化设计 [J]. 中南林业科技大学学报,2013, 33(9)∶ 107-111.
[14] 张永德,汪洋涛,王沫楠,等. 基于ANSYS与ADAMS的柔性体联合仿真[J].系统仿真学报,2008,20(17)∶4501-4504.
[15] 李增刚. ADAMS入门详解与实例[M]. 北京∶国防工业出版社,2009∶18-145.
Simulation and analysis of fruits collision during blueberry harvest based on ADAMS
BAO Yu-dong, GUO Yan-ling, ZHANG Hui, GUO Shuai
(College of Mechanical and Electric Engineering, Northeast Forestry University, Harbin 150040, Heilongjiang, China)
Ιn the course of blueberry harvest with vibration-blueberry picking machine, the dropped and collided each other. The analysis on falling and collision of fruits occurred when the blueberries were harvested by vibrating blueberry picking machine play very important roles on predicting and evaluating the quality of the fruit harvested. Combining with the structure of domestic blueberry picking machine, the falling trajectory and collision process were analyzed, based on which the formula of the collision contact force was obtained. According to parameters of picking machine and blueberry trees, the simplif i ed correlative model of picking machine and fruit were established by adopting ADAMS, thus obtaining the values range of collision contact forces. With the obtained formula, the collision contact forces can be calculated to predict and evaluate quality of the harvesting fruit quality.
forestry machinery; vibration-blueberry picking machine; blueberry fruits; fruits harvest; fruits of collision during the harvest; ADAMS; simulation
S776.22+2;S225.93
A
1673-923X(2013)12-0157-04
2013-07-01
国家林业局948项目(2011-4-21)
鲍玉冬(1986-),男,辽宁抚顺人,博士研究生,研究方向:机电一体化技术,农林采摘机和农业机械
郭艳玲(1962-),女,黑龙江双鸭山人,教授,博士生导师,研究方向:机电一体化技术,特种加工技术,农林采摘机和机器人
[本文编校:文凤鸣]
