ExoMars 2016火星探测计划进入、减速、着陆的验证任务分析
2013-12-29贾贺荣伟
贾贺 荣伟
(北京空间机电研究所,北京 100076)
1 引言
目前,美、俄、日、印、欧等国家和组织都在积极地进行火星等深空探测方面的研究,特别是美国从1975年来,已成功执行了7 次火星表面探测任务。即海盗-1与海盗-2轨道器/着陆器,“火星探路者”(MPF)着陆器/巡视器,勇气号与机遇号火星探测巡视器(MER),凤凰号着陆器,以及“火星科学实验室”(MSL)着陆器/好奇心号巡视器,经过7次成功的火星表面探测,美国的深空探测能力已经达到了技术成熟与先进的水平,完全可以满足安全着陆与表面移动探测的要求[1-2]。
特别是20世纪90年代以来,“火星探路者”主要通过使用气囊缓冲的形式[3]成功着陆至火星表面,初步验证了在火星大气层的进入、减速、着陆(Entry,Descent,Landing,EDL);21世纪初,勇气号与机遇号火星探测巡视器成功实现较大范围的表面巡视,并使气囊缓冲着陆的方式得到了充分验证[4];此后的凤凰号着陆器使用了着陆支架缓冲着陆方式,实现了火星北极区的安全着陆[5];2012年成功实现火星表面着陆的“火星科学实验室”(MSL)着陆器/好奇心号巡视器,实现了更大质量进入器的EDL,使用空中吊车这一新的着陆方式,将火星EDL技术提升到了一个新的高度[6]。
进入21世纪以来,欧洲航天局(ESA)发挥自身优势,开展了具有独自特色的火星探测活动。其中火星生物学(ExoMars)计划是欧洲航天局与美国航空航天局(NASA)联合进行火星探测的一次重要的深空探测活动,但后期由于NASA 的退出,现在俄罗斯作为新的合作方加入到了计划中来。ExoMars计划包含2016年和2018年两次发射任务,2016年的发射任务主要是为了对实现火星表面安全软着陆的主要关键技术进行相关试验验证[7]。
本文对ExoMars计划中2016年的发射任务进行了阐述,针对EDL 验证的任务目的、任务规划以及任务组成进行分析,对EDL验证的相关关键技术(气动热、热防护、降落伞减速、推进制动、缓冲结构等)进行了详细介绍,以期为下一步我国开展火星等深空探测任务提供参考。
2 ExoMars 2016计划概述
ExoMars计划是欧洲航天局进行的一次重要的火星探测活动,是ESA 曙光(Aurora)载人登火星计划的第一步。ExoMars计划的主要科学目标是:①寻找过去与现在火星生命的痕迹与特征;②分析火星次表层的水和化学环境;③研究火星大气痕量气体及其来源。
ExoMars计划的主要技术目标包括:①将有效载荷安全着陆在火星表面的EDL技术验证;②用一个火星巡视器实现火星表面的移动探测;③实现火星次表层样品采集;④具备对火星样品的获取、封装、转移以及分析能力。
ExoMars 2016包括ESA 负责总体设计的痕量气体轨道器(Trace Gas Orbiter,TGO)和EDL验证器(EDL Demonstrator Module,EDM)(图1),发射任务由ESA 主导,计划在2016年1月使用NASA的宇宙神-V 431运载火箭发射。预计经过9 个月的巡航飞行,于2016年10月到达火星。

图1 ExoMars计划将在2016年发射的TGO 和EDMFig.1 TGO and EDM of the ExoMars program in 2016
TGO上装载了美国和欧洲制造的科学仪器,用于获得火星大气中甲烷及其它痕量气体存在的证据。痕量气体是指大气中浓度在百万分之一以下的气体粒种,这些痕量粒种受到各种物理、化学、生物的作用并参与生物化学的循环,对大气环境及生态有一定的影响。火星大气中的痕量气体可以用来作为火星是否存在生命及研究地质演化的依据。该次发射任务还将对ESA 在2020年以后火星探测计划中必须的关键技术进行试验验证,并为2018年的发射任务和其它火星表面着陆器提供与地球的通信支持,该项辅助能力直到2022年底整个ExoMars计划结束为止。
ExoMars 2016计划发射任务的主要事件见表1。

表1 ExoMars 2016计划发射任务主要事件表Table 1 Main events of the ExoMars 2016mission

续表
目前,ExoMars已经完成了2016年发射任务中的EDL验证器有效载荷的选择,已进入工程实施阶段,正在针对相关关键技术开展地面试验。
3 ExoMars 2016的EDL验证任务
对于任何火星探测任务,其最核心的科学目标之一就是寻找火星表面曾经或者现在存在着生命的证据,实现这一科学目标的最佳方法是分析火星表面的生命痕迹。而到达火星表面最大的挑战,就是如何通过执行EDL工作程序,将探测器安全着陆在火星表面。
ExoMars计划通过用EDM 试验EDL 工作程序中的相关关键技术,验证能安全着陆在火星表面的技术平台,ExoMars 2016任务的探测器组成示意图如图2所示。

图2 ExoMars 2016计划发射任务探测器外形图及组成示意图Fig.2 ExoMars 2016spacecraft composition and aeroshell geometry
减速着陆验证器(EDM)的主要技术目标是:
(1)继承ExoMars计划中之前单个任务阶段中的关键技术,进一步开展详细设计,对各项关键技术进行必要的地面试验,最终通过实际飞行试验来验证EDL的相关关键技术。
(2)在EDL 技术验证过程中,对相关关键技术的性能指标进行测试和测量,并将数据传回地球,以在飞行试验后对整个飞行轨道进行重建。
此外,虽然EDM 主要用于验证EDL 技术,但它也提供了有限但高效的有效载荷(科学仪器)空间,使其能实现一定的科学目标。它将一个质量为3kg的有效载荷包减速着陆在火星表面上,并在着陆后进行短期的科学实验,大约持续4 个火星日[7-8]。
4 ExoMars计划EDL验证的任务分解
4.1 EDL验证的任务组成
作为EDL验证任务的主要组成部分,EDM 是一个钝型体航天器(600kg)。由一个半锥角70°的钝头前体结构和一个半锥角为47°的圆锥形后体结构构成。EDM 的外直径为2400 mm,表面平台直径为1700 mm(图3)。该气动外形继承了NASA之前成功实现EDL 的火星进入器(如“火星探路者”、“火星探测漫游者”和凤凰号)的气动外形。

图3 EDM 气动外形示意图Fig.3 EDM aerodynamic configuration
EDM 主要由热控系统(TCS)、后体(BCV)、降落伞系统(PAS)、表面平台、前体(FS)、前体分离机构(FSSM)等部分组成(图4)。其中表面平台(300kg)由平台结构、反推控制系统(RCS)、电子与电源系统、数据储存系统、制导导航与控制(GNC)传感器、UHF电子通信设备、热控系统(TCS)、表面传感器单元(ESA CFI)组成[9]。

图4 EDM 结构构型分解示意图Fig.4 EDM exploded view
4.2 EDL验证的任务规划
4.2.1 发射、巡航与停靠火星大气阶段
在EDM 和TGO 的组合体飞往火星的巡航过程中,EDM 处于休眠模式,主要是为了减少主电池的能量消耗。TGO 为组合体提供必需的操作以及与地球间的通信,并为EDM 提供所需的能量。
在组合体到达火星3天之前,EDM 通过三点旋转分离机构与TGO 进行分离。此次分离将为EDM 提 供 一 个 大 于0.3 m/s 的 相 对 速 度 和2.5r/min的自旋角速度,这个角速度将使EDM 与进入边界点(EIP)呈0°的攻角。EDM 停靠火星大气阶段将持续3天,时间长短取决于TGO 与EDM分离后的轨道修正,为火星轨道进入提供必须的轨道机动。这一阶段对EDM 非常关键,导航和分离机构的散布将会叠加,火星进入边界点的轨道散布也将进一步增加。本阶段最为关键的动作是利用EDM 后体上的太阳敏感器对惯性姿态进行测量。在到达火星进入边界点之前,激活EDM 系统,为EDL阶段执行相关工作程序做好准备[9]。
4.2.2 EDL阶段
由于ExoMars 2016发射任务计划在到达火星时太阳经度Ls=245°,EDM 将不可避免遭遇火星全球尘暴季节。因此,在进行EDM 设计时必须考虑全球尘暴的影响。
在与TGO 进行分离后,EDM 将以双曲线轨道进入火星大气。EDM 的目标着陆点是火星子午线平原区域(6.15°W,1.82°S),目前已经全面掌握了该区域的地形和大气特性,在此区域着陆可以将减速着陆到火星表面的危险降至最低。
目前,目标着陆区域的散布椭圆半长轴小于50km,随着对危险识别的进一步增强,着陆点区域的特征将更加明确。工作人员正在通过NASA 提供的着陆点的高分辨率图像,对着陆点散布椭圆的环境特征进行进一步分析。
EDM 的进入、减速、着陆工作程序如图5所示[9]。

图5 EDM 的EDL工作程序示意图Fig.5 EDM entry,descent and landing process
在火星大气层边界(火星海平面高度120km处),EDM 的最大相对速度为5.827km/s,确定进入角还要考虑EDM 的各种工程约束,主要包括:
(1)热流密度<650kW/m2;
(2)热流载荷<40 MJ/m2;
(3)载荷因子<10.5g;
(4)降落伞充气载荷<73.5kN;
(5)着陆点精度<50km。
考虑这5个因素以及火星大气条件的变化(包含密度、风场)、EDM 特性(包含质量特征、气动力性能)的影响,对进入走廊进行评估,得到EDM 的进入角大于1.1°。由于EIP 的散布小于±0.3°,得到EDM 的进入飞行路径角为-12.4°。
当EDM 以双曲线轨道进入火星大气后,在1.8~2.1马赫数的速度区域内,名义直径为12m 的盘-缝-带伞开伞。在降落伞稳定减速后,前体弹射分离;安装在EDM 表面平台上的多普勒雷达高度计开始工作。将这些工程数据传输至惯性测量单元中,经GNC 算法计算,得到EDM 动力下降段点火的高度。在到达该高度时,由降落伞携带后体与EDM表面平台分离,EDM 开始最后动力下降段的工作。此时高度约为1400m,速度约为80m/s。
在动力下降段,EDM 在9个400N 单组元发动机的作用下逐渐减速,最终在高度为1.5 m 处,垂直速度和水平速度减至0 m/s。此时,反推发动机关机,EDM 表面平台自由着陆到火星表面。着陆时,EDM 表面平台下的缓冲蜂窝夹层结构将进一步减小着陆冲击荷载。采用这种压缩吸能结构主要是因为它质量轻、体积小,简单可靠、成本低以及着陆后EDM 表面平台与火星表面的距离可以达到很小的程度。
在EDM 表面平台上安装了很多传感器,主要目的是在着陆后通过传回地球的有效工程数据对飞行轨道进行重建,所有的这些传感器设备总质量为6kg[9]。
4.2.3 火星表面科学实验任务阶段
EDM 没有设计放射性同位素能源(如放射性同位素热源装置RHU 或放射性同位素热电式发电机RTG),也没有太阳电池板。着陆火星后EDM 的能量供给仍然依靠它的主电池工作,由于EDM 在所有的飞行阶段都是由该主电池供电,所以EDM 在火星表面上的寿命只有4个火星日。
EDM 的科学目标主要是:
(1)确定从高空至火星表面的火星大气的关键参数特性(如密度、温度、压力、风场等);
(2)在强尘暴条件下火星大气的主要特征;
(3)进一步扩展有效工程数据量,以解决遥感数据与模型的差异问题。
由于EDM 质量、能量和数据量的限制,上述科学目标不一定能够完全达到。虽然如此,EDM 仍然会是一次独立的对火星全球尘暴季节的火星大气进行测量的机会[9]。
4.2.4 着陆后通信阶段
EDM 的通信系统将具备以下功能[9]:
(1)在停靠火星大气阶段的3 天内,提供与EDM 正常状态监视器的通信。
(2)在EDL 阶段,提供通信功能。传输实时数据,为飞行试验后的分析提供数据。通信内容包含各分系统的状态情况、由GNC 算法得到的状态矢量以及EDL过程中分系统的关键参数。
(3)在表面科学实验任务阶段,提供可靠的链路以实现EDL阶段的所有数据(100 Mbit)和表面科学实验任务阶段的所有数据(50 Mbit)的传输,该工作必须在EDM 着陆后4个火星日内完成。
4.3 EDL验证任务的关键技术
对ExoMars 2016年发射任务而言,EDM 最主要的技术目标,就是对后续欧洲火星探测任务必须的关键技术环节进行试验验证。其中,EDL 验证任务的关键技术包括4项[10-11]:气动热力学分析技术、进入与减速系统设计、GNC 系统设计与着陆系统设计。
4.3.1 气动热力学分析技术
受EDM 质量特性等工程约束的限制,对EDM气动外形进行设计时,必须保证其在高超音速和超音速时都具有良好的飞行特性。体现在气动热力学分析上主要有以下几点:
(1)提供停靠火星大气阶段的转动稳定性;
(2)将峰值热时EDM 的最大攻角限制在7°以下,主要是保证防热大底背风处的热防护材料热流值在2.0 MW/m2;
(3)在14~16马赫数区间内或预期的高超不稳定区域,EDM 具备良好的静态稳定性;
(4)控制超音速开伞时的最大攻角小于15°。
由于EDM 的气动外形与NASA 之前的火星进入器很相似,故可以利用NASA 火星进入器气动热的数据库对EDM 进行分析。但由于EDM 与之前火星进入器的进入速度和弹道系数不同,要想获得其飞行性能就必须进行专门的试验验证。
为建立ExoMars计划的特定飞行区间内的气动力学数据库(AEDB)和气动热力学数据库(ATDB),EDM 开展了大量的数值仿真试验验证和实际试验验证。这些试验主要包括:
(1)高热焓等离子风洞试验(ONERA F4、DNW/DLR HEG);
(2)超高速冷风洞试验(ONERA S4);
(3)喘流热风洞试验(DNW/DLR TMK、H2K);
(4)粗糙度性能风洞试验(曼大、DNW/DLR);
(5)轨道式超音速至跨音速试验(ISL);
(6)跨音速自由振动风洞试验(DNW/DLR TMK);
(7)亚音速风洞试验(DNW/DLR HST)。
4.3.2 进入与减速系统设计
EDM 在进入火星时,通过前体保护以防止热流的烧蚀。前体由复合材料表层、铝蜂窝以及热防护系统(TPS)三部分组成。前体与后体的热防护系统都用Norcoat-Liege材料。在Astrium 公司进行的等离子试验验证了该种防热材料在空气流中能够承受的最大热流为2 MW/m2。对防热材料的低温性能也进行了相关试验验证,可以满足巡航段-110℃的低温要求。
EDM 必须在通过火星大气后实现减速和稳定。EDM 的降落伞减速系统使EDM 的速度和高度达到着陆系统的要求。此外还必须提供有效的弹道系数比,以使EDM 与防热大底安全分离。
降落伞系统由三部分组成:降落伞、展开装置以及伞舱盖。EDM 的降落伞为一顶名义直径为12m的盘-缝-带伞。降落伞的几何透气量为22.4%,能够为EDM 提供足够的阻力和稳定性,最大吹风马赫数为2.1。降落伞的拖曳距离为27m,这样的设计是为了限制前体尾流的影响,EDM 主伞结构如图6所示。
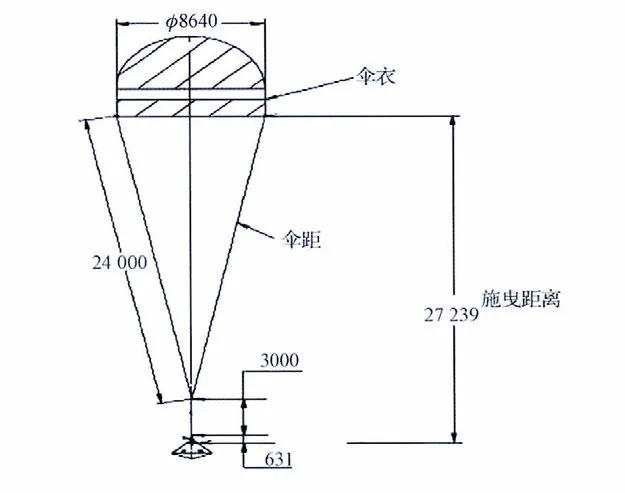
图6 EDM 主伞结构示意图(单位:mm)Fig.6 EDM main parachute configuration
展开装置是一个火工弹射装置,能在超音速流中把降落伞弹射出去,并且不损伤降落伞本身。展开装置将降落伞包以30m/s的速度弹射出去,并且保证降落伞能够在较小的反作用载荷条件下平稳展开。为了保证弹射伞舱盖时,弹射出去的部分不会反过来碰撞降落伞,在伞舱盖后面增加了一具直径为1.6m 的舱盖伞。
降落伞包需要经过静态和动态的拉出试验,无论是静态试验还是动态试验,都必须保证其阻力小于50N。
4.3.3 GNC系统设计
EDM 的关键执行动作有两个:①确定降落伞装置开伞的时机;②发送指令并控制动力下降段的工作。这要依靠EDM 上GNC 的主要传感器——惯性测量单元和多普勒雷达高度计来实现。
GNC 系统启动开伞的功能主要是通过基于加速度测量的一种算法来实现。该算法简单可靠,能够确保降落伞装置在正确的马赫数-动压条件下展开。
GNC系统控制动力下降段工作的功能主要是通过几个特殊的驱动程序来实现。对于GNC 系统而言,最关键的环节是将有效传感器的散布包含在计算结果内,EDM 相对火星表面的高度和速度都由雷达高度计获得,但其测量精度是变化的。当EDM下降到10m 以下高度时,雷达高度计的精度就不能够满足任务要求了。
着陆段GNC 系统工作结束后EDM 的技术状态指标,见表2所示[12]。
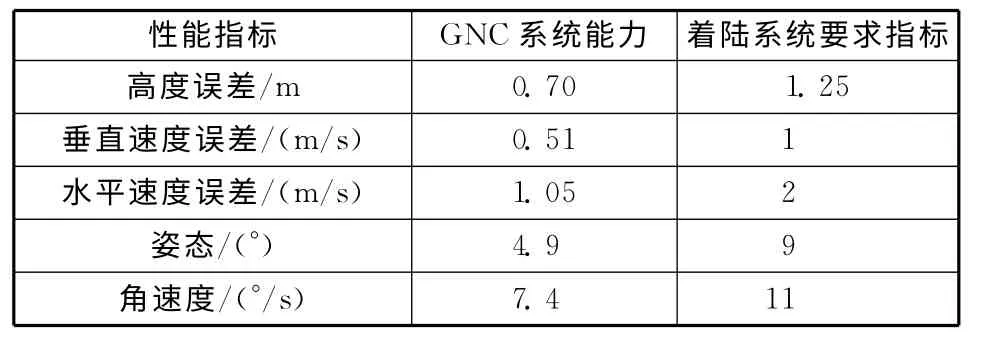
表2 着陆段GNC系统工作性能指标Table 2 Landing phase GNC performance
4.3.4 着陆系统设计
EDM 的着陆系统包括一个被动着陆装置(可压缩缓冲结构)和一个主动着陆装置(液体肼单组元推进系统)。液体推进系统将保证EDM 在高度大约为1.5m 时减速至0m/s。液体推进系统组成如图7所示。

图7 液体推进系统组成Fig.7 EDM reaction control system configuration
着陆缓冲系统由一种层压的可压缩缓冲材料构成,这种材料在冲击过程中将冲击能量吸收后产生变形,以达到最终缓冲的目的。在反推发动机作用完成后,EDM 表面平台将以4m/s的速度着陆,使用可压缩缓冲材料将该速度带来的冲击降到最低,并承受最大40gn的冲击过载。要实现该项功能最大的挑战就是可压缩缓冲材料的结构布局设计。其主要的结构构型如图8所示。

图8 可压缩缓冲材料的结构构型示意图Fig.8 EDM crushable material structure configuration
5 结束语
ExoMars 2016计划发射任务的EDM 已经于2010年12月完成了计划设计复核工作,EDL 的所有关键技术都在按照计划逐步进行。2012年ESA完成了主要的关键技术试验验证,包含降落伞装置的超音速风洞试验、推进系统的热点火试验、多普勒雷达高度计场试验、可压缩缓冲平台全尺寸试验等。
本文通过对ExoMars计划EDL 验证的任务分析,明确了EDM 的气动热、热防护、降落伞减速、推进制动、缓冲结构等关键技术内容。表明要想进一步深入开展火星探测任务的研制工作,必须结合我国现有的技术状态,首先对上述火星探测各项关键技术试验项目进行合理的规划,并开展相关的试验验证,才能奠定我国火星探测任务EDL系统设计与研制的坚实基础。
(References)
[1]朱仁璋,王鸿芳,泉浩芳,等.美国火星表面探测使命述评(上)[J].航天器工程,2010,19(2):17-33
Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.Overview of the US Mars surface missions(part one)[J].Spacecraft Engineering,2010,19(2):17-33(in Chinese)
[2]朱仁璋,王鸿芳,泉浩芳,等.美国火星表面探测使命述评(下)[J].航天器工程,2010,19(3):7-27
Zhu Renzhang,Wang Hongfang,Quan Haofang,et al.Overview of the US Mars surface missions(part two)[J].Spacecraft Engineering,2010,19(3):7-27 (in Chinese)
[3]Thurman S W.Return to the red planet:An overview of the Mars Pathfinder Mission,AIAA-95-1534-CP[R].Pasadena,CA:Jet Propulsion Laboratory,1995
[4]Roncoli R B,Ludwinski J M.Mission design overview for the Mars exploration rover mission,AIAA 2002-4823[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Washington D.C.:AIAA,2002
[5]Desai P N,Prince J L,Queen E M.Entry,descent,and landing performance of the Mars Phoenix lander,AIAA 2008-7346[C]// AIAA/AAS Astrodynamics Specialist Conference and Exhibit.Washington D.C.:AIAA,2008
[6]Sengupta A,Witkowski A,Rowan J.Overview of the Mars Science Laboratory parachute decelerator system,AIAA 2007-2578[C]//19th AIAA Aerodynamic Decelerator Systems Technology Conference and Seminar.Washington D.C.:AIAA,200.
[7]Bayle O,Lorenzoni L,Blancquaert T,et al.ExoMars entry,descent and landing demonstrator mission and design overview[EB/OL].[2012-05-10].http//www.planetaryprobe.org/sessionfiles/session2/papers/Bayle_Exomars_EDM_Overview-Paper.pdf
[8]Portigliotti S,Dumontel M,Capuano M,et al.Landing site targeting and constraints for the ExoMars 2016mission[EB/OL].[2012-05-10].http//www.plaetaryprobe.eu/IPPW7/preceedings/IPPW7%20Proceedings/ Papers/Session2/p507.pdf
[9]Portigliotti S,Bayle O,Venditto P,et al.ExoMars-2016descent module EDL demonstrator mission[C]//7th European Symposiumm on Aerothermodynamics.Paris:ESA,2011
[10]Beck J,Tran P,Walpot L.Aerothermodynamics of the ExoMars entry demonstrator module[C]//7th European Symposiumm on Aerothermodynamics.Paris:ESA,2011
[11]Ritter H,Bayle O,Mignot Y,et al.On-going European development on entry heatshields and TPS materials[EB/OL].[2012-05-10].http//www.planetaryprobe.org/sessionfiles/Session7A/Papers/Ritter_European_TPS-Paper.pdf
[12]Portigliotti S,Martella P,Capuano M,et al.Exo-Mars 2016GNC approach for entry,descent and landing demonstrator mission and design overview[EB/OL]. [2012-05-10].http//www.planetaryprobe.org/sessionfiles/Session2/papers/Bayle_ExoMars _EDM_Overview-Paper.pdf