基于Simulink的主动径向转向架控制方法研究
2013-12-23傅茂海王军平
王 平,傅茂海,刘 楠,金 鑫,王军平
(西南交通大学 机械工程学院,四川 成都 610031)
0 引言
铁道车辆转向架需要具有良好的曲线通过性能以及横向运行稳定性,但是在通常情况下这两者是相互矛盾的。增加转向架轮对的水平定位刚度可有效提高横向稳定性,但曲线通过能力将会下降,轮轨横向力增大,轮轨磨耗加剧;而降低转向架轮对的定位刚度,实现轮对柔性定位,可以提高转向架的曲线通过性能,但直线运行稳定性降低,车辆易出现蛇行失稳现象。因此,为了实现二者的兼容,提出了径向转向架理论方案。传统的径向转向架一般分为自导向转向架和迫导向转向架,自导向径向转向架依靠轮轨之间的蠕滑力导向,迫导向转向架是利用车辆通过曲线时车体与构架之间的相对转角,并通过迫导向机构来控制前后轮对趋于曲线的径向位置。但是自导向转向架在半径较小的曲线上其导向功能不能得到有效发挥,而迫导向转向架的径向机构必须直接或间接地连接车体,因此其结构相对于自导向转向架比较复杂,并且对径向机构制造精度的要求也较高。
为了进一步改进转向架通过小半径曲线的性能,进而研制出了主动径向转向架。主动径向转向架通过曲线时利用安装在转向架侧梁上的作动器推动径向机构运动,使轮对达到曲线径向的目的,使转向架具有良好的曲线通过性能;在直线上运行时,作动器不动作,而且给轮对提供一定的纵向定位刚度,提高其运行的稳定性。
1 主动径向转向架控制系统模型与原理
主动径向转向架的控制系统比较复杂,它是主动径向转向架的核心部分。控制系统的组成包括信号采集装置、伺服电机、作动器以及控制器等。转向架构架两侧装有作动器,一端与构架相连,另一端与径向机构相连,通过采集的信号控制作动器动作,使轮对处于曲线的径向位置。其控制系统结构框图如图1所示。

图1 主动径向转向架控制系统结构框图
图1中,计算机主要负责信号采集并将其转换为控制系统的控制指令,以及监控机电式作动器与伺服驱动器的工作状况;控制位移测量是作动器实施动作后测量受控对象的相对角位移,并与理论值相比较,达到最优控制。本主动径向转向架的控制部分采用的是机电式作动器和电机伺服驱动器。伺服电机在控制指令作用下带动驱动器正反转动,由行星齿轮箱与滚珠丝杆螺旋副将电机的旋转运动转变为丝杆螺母副的直线运动,从而控制作动器的伸缩运动,使轮对到达径向位置。根据文献[2],将伺服驱动器看作为比例环节K2;机电式作动器中的伺服电机可设定为一个传递函数G(s)=(1/KE)/(Tms+1)(其中,KE为感应电压常数,KE=0.346V·s/rad,Tm为电机时 间常数,Tm=0.003 3s);机械传动部分看作是积分环节L/(2isπ)(其中,L 为丝杠导程,L=10mm,i为总传动比,i=10);位移传感器作为反馈环节,即位移与角度的关系式,反馈系数Kf=0.82。建立的控制系统方框图如图2所示。

图2 控制系统方框图
控制系统中,反馈环节的位移与角度关系式即为作动器的位移与轮对径向转角关系式,如图3 所示。其中,b为转向架轴距的一半;Ls为车辆定距的一半;R 为曲线半径;ψwo为轮对径向转角。
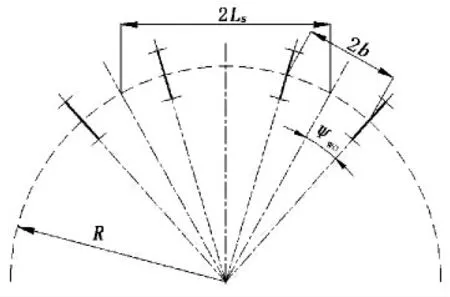
图3 曲线上转向架径向位置关系
由图3有:

作动器的行程x 为:

其中:af为转向架的作动器横向跨距,af=2.45m。
2 控制方法的比较分析
由于主动径向转向架控制系统具有复杂性、时变性以及非线性等特点,因此选取一个恰当的控制方法尤其重要。
2.1 经典PID 控制
经典PID 控制包括比例、积分和微分控制3个部分。由控制理论可知,比例系数Kp决定着控制系统控制作用的强弱,增大比例系数可以有效地减少稳态误差,但是较大的比例系数反而会引起控制系统的振荡甚至导致闭环控制系统的不稳定;积分时间常数Ki可以消除稳态误差,但它会使系统的动态响应较慢,同时较大的积分系数会使系统的稳定性变坏;微分时间常数Kd可以提高控制系统的动态响应,克服振荡,减小调整时间,从而使系统趋于稳定。这3个系数互相制约互相联系,需要反复调整才能达到理想的效果。根据文献[2],本文采用P 控制,PID 控制参数为:Kp=2 600,Ki=Kd=0。运用MATLAB 中的Simulink模块进行建模仿真分析,其控制仿真原理图如图4所示,仿真结果如图5和图6所示。

图4 PID 控制仿真原理图

图5 PID 控制仿真的阶跃响应曲线

图6 PID 控制仿真的稳态曲线
由图5和图6可知,采用PID 控制方法,系统的阶跃响应快,但是控制系统输出稳定性较差。
2.2 模糊控制
采用模糊控制在MATLAB 的Simulink 模块中实现模糊控制的仿真,其控制仿真原理图如图7所示,仿真结果如图8和图9所示。
由图8和图9可知,采用模糊控制方法,控制系统输出稳定较好,但阶跃响应时间相应较慢。
2.3 混合型模糊-PID 控制
混合型模糊-PID 控制采用常规PID 控制器和模糊控制相结合的系统结构。本文采用的是P 控制和模糊控制相结合,P 控制的输出与二维模糊控制的输出相叠加作为混合型模糊-PID 控制的总输出。其中模糊集合、语言变量以及控制规则依然采用模糊控制形式,只是对P控制的比例系数Kp和K2进行了调整。经过反复调整最终确定比例系数Kp=900,K2=2。运用MATLAB的Simulink模块建立的混合型模糊-PID 仿真原理图如图10 所示,其仿真结果如图11和图12 所示。

图7 模糊控制仿真原理图

图8 模糊控制仿真的阶跃响应曲线

图9 模糊控制仿真的稳态曲线

图10 混合型模糊-PID 仿真原理图
由图11和图12可知,采用混合型模糊-PID 控制方法不仅系统的阶跃响应时间较快,而且系统的稳定性也较好。
3 结论

图11 混合型模糊-PID 控制仿真的阶跃响应曲线
通过在MATLAB的Simulink模块中,对主动径向转向架的控制系统进行仿真。仿真结果显示采用混合型模糊-PID 控制方法不仅系统的阶跃响应时间较快,而且控制系统输出的稳定性也较好。因此主动径向转向架控制系统宜采用混合型模糊-PID 控制方法。
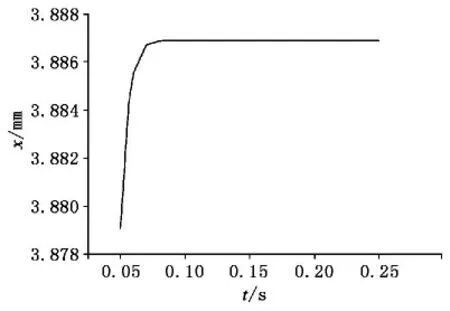
图12 混合型模糊-PID 控制仿真的稳态曲线
[1] 严隽耄,傅茂海.车辆工程[M].北京:中国铁道出版社,2007.
[2] 卜继玲.主动悬挂摆式列车组运行性能的研究[D].成都:西南交通大学,2001:98-99.
[3] 席爱民.模糊控制技术[M].西安:西安电子科技大学出版社,2008.
[4] 梁炜昭,刘后广,赵秀云.基于模糊自适应PID 的摆式列车倾摆控制系统研究[J].机电工程技术,2009,38(3):13-15.
[5] 杨志强,张济民.基于PID 算法的摆式客车倾摆控制研究[J].机械设计与制造,2005(11):49-50.
