冗余度机器人多目标优化的研究
2013-12-23宁英豪
宁英豪,贾 梦
(1.太原科技大学机械工程学院,山西 太原 030024;2.太原科技大学电子信息工程学院,山西 太原 030024)
0 引言
冗余度机器人由于存在多余的自由度,往往可以实现多种目标的优化,如避障、容错等。在多目标的优化中,比较常用的是将单个目标线性加权求和的方法,通过加权系数的选取体现单个目标的重要程度,故加权系数的选取影响着整个优化系统的性能。文献[1]中采用模糊控制的方法选取加权系数,但加权系数的非连续性易产生关节角振荡。本文提出了一种新的加权系数选取的方法,在体现单个目标重要程度的同时能够对其进行实时调整。
1 冗余度机器人的多目标优化
1.1 梯度投影法



1.2 加权因子的选取
在实际的运用中,由于加权系数wi的不当选取会产生不当的优化,因此,提出紧急度的概念。设Mimax、Mimin分别是目标函数的最大极限值和最小极限值(由实验取得),对于目标函数的紧急度si可描述为:
其中:hi为紧急度的自变量。hi越大,si也越大,表示此目标函数越需要优化。
优化力度是对冗余度机器人的性能指标函数Hi的可优化能力的度量。优化力度越大,说明目标函数的可优化能力越强。优化力度λi可表示为:

为了体现单个性能指标函数的重要性及在整体中所占的比例,令:

当优化指标函数Hi取极大化时,式(4)的系数取正号;反之,则取负号。
因此,新的加权因子表示为:

1.3 新的梯度投影法
在梯度投影法中,梯度提供一个优化方向的作用[2]。为了避免单一目标的梯度向量数量级不一致造成的算法失效,本文采用了规范化方法[3]:


经过式(6)处理后,各个单一目标梯度向量的数量级相同,而且不会影响其方向矢量的性质。文献[2]指出,梯度投影算法的失效往往是特解与齐次解的数量级悬殊过大,并提出了均衡比例因子的算法:

其中:α为阻尼因子,其值取0.4~1.5。
但当‖(I-J+J)▽H‖趋于零时,会造成kb趋于无穷大,从而造成算法的失效。为此,取α=1,将均衡比例因子改进为:

其中:ε为一个非零的正极小量,本文中ε=0.01。综上所述,新的线性加权梯度投影算法可表示为:

其中:▽Hw的选取参考式(1)和式(6),k 的选取参考式(8)。
2 计算机仿真
2.1 计算机建模
2.2 优化性能函数的确立
(1)避免关节范围越限性能指标:


(2)避免奇异点的性能指标函数有以下两种形式:
一种是用可操作度w[4]表示避奇异点的性能指标函数:

其中:σi为雅克比矩阵的奇异值。
另一种是用条件数κ[5]表示避免奇异点的性能指标函数:

其中:σmax、σmin分别为雅克比矩阵的最大和最小奇异值。
条件数κ体现了雅克比矩阵向各个方向的变换均一性,κ≥1,条件数越小越体现出优良的综合性能。但由于条件数的梯度不易于表示成关于θ的函数,因此,用操作度表示避奇异点的性能指标函数:

在紧急度的计算时,κ比w 更加简便,故选择紧急度自变量h2=κ,M2max=10,M2min=1.5。
2.3 仿真结果及其分析
加权因子wi体现出单个指标的重要程度(其值选取参考式(4)),关节角度和条件数分别体现出H1(θ)和H2(θ)的优化结果,故对其进行了数值仿真,函数H1(θ)与H2(θ)的加权因子的变化见图1,条件数κ的变化见图2。
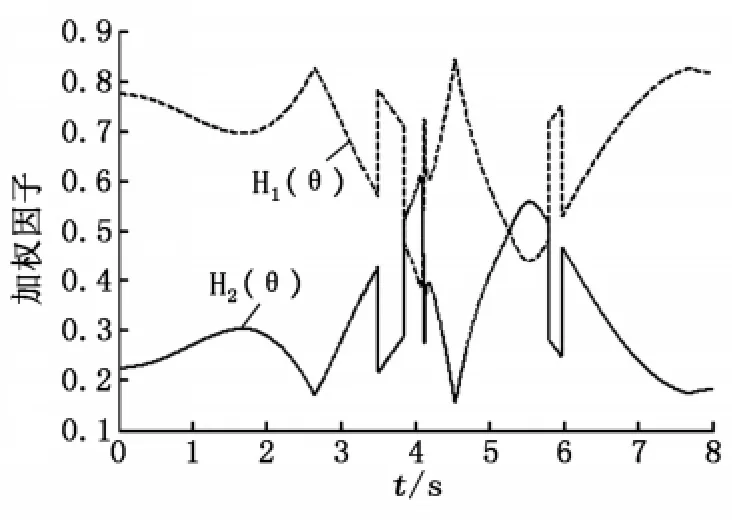
图1 函数H1(θ)与H2(θ)的加权因子变化曲线

图2 条件数变化曲线
从图1可以看出,在大多的时间段内,关节范围优化H1(θ)的重要性要比H2(θ)的大。但在4s时,在图2中条件数κ有一个突增,指标函数H2(θ)恶化,故在图1中,H2(θ)的加权因子也随之增加,并超过函数H1(θ),H2(θ)的优化加强。
3 结论
本文提出了紧急度的概念,并用关于可优化度的函数作为放大因子,提出了一种新的加权线性梯度投影算法。通过计算机仿真,证明该方法能够对单个性能指标函数的重要性进行实时调整,实现整体的优化。
[1] 郭大忠,柳洪义.冗余度机器人多目标模糊规划的研究[J].机械与电子,2006(5):42-44.
[2] 吴瑞珉,刘延荣.一种新的冗余度机器人梯度投影算法[J].机械工程学报,1999,35(1):76-80.
[3] Christopher D C.Failure recovery in redundant serial manipulators[D].Austin:The University of Texas at Austin,2000:61-70.
[4] Liegeois A. Automatic supervisory control of the configuration and behavior of mutibody mechanisms[J].IEEE Trans Sys Man Cyber,1977(12):868-871.
[5] Maciejiewski A A. Fault tolerant properities of kinematically redundant manipulators[G]//Proc of IEEE Inter Conf on Robotics and Automation.[s.1.]:IEEE,1990,638-642.
