基于虚拟样机技术的机器人空间轨迹实现及仿真分析*
2013-12-23马国红朱书林
马国红,朱书林,王 聪,刘 沛
(南昌大学 机电工程学院,南昌 330031)
0 引言
随着计算机技术的发展,基于计算机技术的虚拟样机技术[1](Virtual Prototype Technology)也随之得到快速的发展。虚拟样机相对于物理样机在产品的设计、研究及其整个产品系统性能的分析与测试上具有开发周期短、效率高、低风险、低成本等优势[2-3],并在产品设计的早期能及时发现问题和解决问题。目前在国外得到广泛的应用。而国内对虚拟样机技术的研究起步要晚,但发展也相当的快。特别是在航空航天、汽车、船舶、工程机械等一些大型制造企业及研究机构中应用较多。
为了更好的研究机器人系统,本文结合虚拟样机分析软件ADAMS,研究了三自由度机器人早期设计阶段在虚拟样机技术中的应用。通过建立样机模型,利用机器人运动学原理,在ADAMS 环境中实现了机器人未端点沿特定轨迹运动的功能,通过仿真,分析了机器人系统运动学和动力学特性。为机器人系统的研究及物理样机的研制提供了很好的参考依据。
1 机器人模型设计及运动学分析
本机器人由三个旋转关节组成,采用三个电机控制机器人关节的运动。可以把机器人看作是由一系列关节连接起来的由连杆所组成的多刚体系统。为了更好的描述机器人相关参数,引用Denavit 和Hartengerg 提出的D-H 方法,即用连杆的长度ai和扭角αi来描述连杆的尺寸参数,用偏置di和关节角θi来描述相邻连杆之间的关系。以本例设计的连杆1 为例,连杆两端两个关节1 和2 的轴线的公垂线距离表示连杆长度a1,关节2 绕公垂线转至关节1 的转角表示扭角α1。偏置d1是以两相邻连杆的关节公垂线之间的距离表示,在垂直于关节轴线的平面内,两相邻公垂线之间的夹角表示关节角θ1。以上扭角和关节角的正负都是通过右手定则确定。其DH 参数设计如表1 所示。
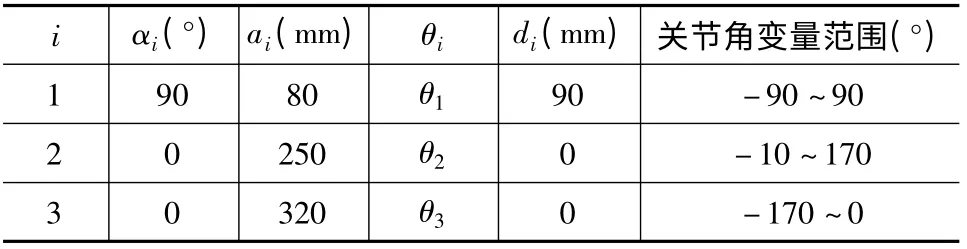
表1 三自由度机器人D-H 参数
由于ADAMS 建立复杂模型相对较困难,可以选用专业的三维建模软件进行建模,本文应用UG 建立模型并装配。以parasolid 格式将其导入到ADAMS/View 环境中,并定义好材质、重力加速度、运动副及驱动等。重力加速度应根据模型在现实中的环境进行设置,本模型重力加速度方向为负Z 轴,大小为9.8m/s2。完成后的样机模型如图1 所示。

图1 导入ADAMS/View 中的机器人虚拟样机模型
在ADAMS/View 环境中,对导入的模型默认初始关节角度值为零度。因此,需要注意在对模型进行装配的过程中,各关节角度值须与下文对机器人做空间任意轨迹运动进行计算时设计的关节角初值相对应。以避免在控制机器人关节角运动时未端出现难以理解的错误轨迹。
对于由旋转关节组成的机器人,关节角是变量,其他参数为常数,由D-H 坐标变换及运动学知识可解得未端点位置与关节变量角之间的关系[4-6],求解过程如下:


由方程组可解得:

根据公式(2)可以获得机器人未端点在任意位置时对应的各关节角度值。
2 数据获取与仿真

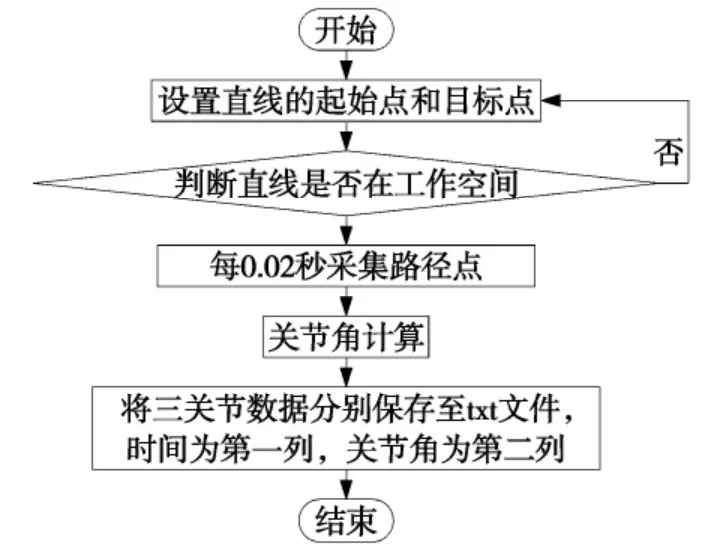
图2 程序流程图
将MATLAB 计算获得的并保存为txt 文件的各关节角数据导入到ADAMS/View 中,创建三个样条线型数据元素,分别命名为SPLINE_1、SPLINE_2、SPLINE_3。并设置第一列数据作为时间变量,第二列数据为测试数据。采用三次样条函数进行插值,生成的曲线作为驱动关节角运动的函数,其驱动函数为CUBSPL(time,0,SPLINE_2,0)。Time 是第一个独立变量,SPLINE_2 是关节2 的样条线型数据。0表示不微分[7-9]。函数曲线和电机速度及加速度曲线如图3。由图知电机速度变化平滑,加速度变化波动不大,因此采用三次样条插值可以很好的保护电机,延长电机寿命。关节1 和3 的驱动函数以此类同。设定仿真时间为10 秒,步长为200 步进行仿真[10]。注意仿真时间要与整个轨迹运动设计时间相同。未端点轨迹仿真结果如图4。

图3 电机驱动函数及其速度、加速度曲线
图4 机器人未端点空间直线轨迹
3 仿真结果分析
ADAMS/PostProcess 具有强大的后处理能力,仿真计算完成后,通过该模块可以完成曲线绘制和数据处理,仿真动画等功能。如图5 所示,机器人未端点速度波动最大值为81.277mm/s,最小值为81.264mm/s,平均速度为81.271mm/s。最大和最小值误差为0.013mm。说明采用这种三次样条插值的方法,可以获得很好的未端点运动精度。通过分析图6 发现,机器人在做直线轨迹运动时,关节2 需要输出的最大力矩为853.60n·mm。这为选取电机力矩参数提供了很好的依据。在ADAMS 环境中也可以编制其它的轨迹规划方法来验证机械系统运动学和动力学相关特性。

图5 未端点速度变化曲线

图6 关节2 力矩变化曲线
可以发现,ADAMS 类似于一个黑箱,应用者只需输入相关的设计参数,通过ADAMS 求解器计算,再通过后处理进行分析,即可以获得想要的结果。传统的通过大量的、复杂的公式对机械系统进行运动学和动力学求解,即耗时又费力,ADAMS 可以轻易的完成以前需要花上数倍工作量的任务。
4 结束语
通过多款软件的协作,有效的在机械系统动力学软件ADAMS 环境中建立虚拟样机。利用运动学原理,结合MATLAB 编程计算,将获取的空间轨迹路径点实验数据导入到ADAMS 中,用三次样条插值的方法驱动关节运动,实现机器人未端点做任意空间轨迹的功能。并分析了其运动性能。这种方法可以很好的通过跟踪机器人各部件上点的运动轨迹分析其与周围环境的干涉问题及对其运动学和动力学参数进行分析,也为机器人的研究及物理样机的研制提供参考依据。
[1]赵志平,李新勇. 虚拟样机技术及其应用和发展[J]. 机械研究与应用,2006(1):6-7.
[2]马如奇,郝双晖,郑伟峰,等. 基于MATLAB 与ADAMS 的机械臂联合仿真研究[J]. 机械设计与制造,2010(4):93-95.
[3]曹春芳,孔庆忠. 基于ADAMS 的五自由度机械手运动学仿真[J]. 机械,2007(12):71-73.
[4]朱世强,王宣银,等. 机器人技术及其应用[M]. 杭州:浙江大学出版社,2001.
[5]蔡自兴. 机器人学[M]. 北京:清华大学出版社,2009.
[6]刘松国,朱世强,王宣银. 基于矩阵分解的一般6R 机器人实时高精度逆运动学算法[J]. 机械工程学报,2008,44(11):304-309.
[7]李增刚. ADAMS 入门详解与实例[M]. 北京:国防工业出版社,2010.
[8]陈立平,等. 机械系统动力学分析及ADAMS 应用教程[M]. 北京:清华大学出版社,2005.
[9](美)MSC. Software 著,邢俊文,陶永忠,译. MSC.ADAMS/View 高级培训教程[M]. 北京:清华大学出版社,2004.
[10]黄菊花,徐仕华,刘淑琴,等. 电动汽车动力参数匹配及性能仿真[J]. 南昌大学学报(工科版),2011,33(4):391-394.
