基于ARM技术的CAN总线监控及语音通讯系统研究与设计
2013-12-23张银河王雪雷谢海云
张银河,王雪雷,谢海云,董 波
1.天津大学,天津 300000
2.邯郸卓立精细板材有限公司,河北邯郸 056000
3.京鼎工程建设有限公司,北京 100000
0 引言
在当今现场总线中,工业监控系统中普遍采用的是基于RS485 总线的半双工通讯方式,只能构成主从式结构系统,通信方式也只能以主站轮询的方式进行,系统的实时性、可靠性较差。这种通讯方式信息传输速度慢,很难满足大规模工业自动化安全监控系统对实时性的要求。针对普通通信协议的不足,本文提出了采用CAN 总线实现的无主式通讯方式。
1 系统总体设计
系统从功能上分类,可分为:核心PLC 子系统、CAN 总线监控子系统、语音仲裁等。PLC 子系统是CAN 总线监控系统的上一级控制单位,也是系统的核心控制;语音仲裁是协助CAN总线监控系统实现数字语音功能的部件。由此可见,CAN 总线监控系统是整个系统的核心,也是联络其他各子系统的桥梁。
1.1 CAN 总线系统设计
CAN 总线系统包括ARM 系统主控制板、ARM 系统电话板、ARM 系统闭锁板、ARM 系统尾端板。系统的网络结构图如图1所示。
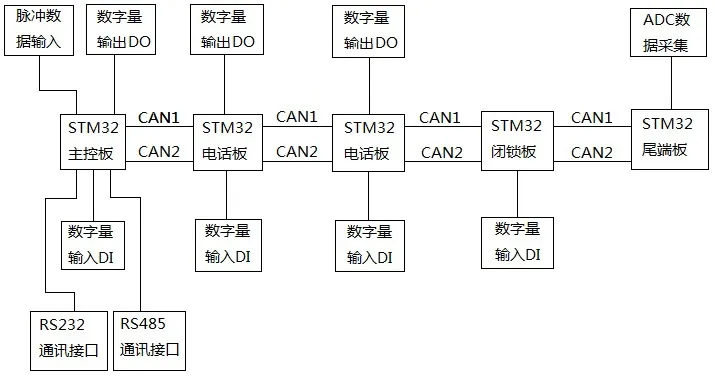
图1 CAN 总线系统的网络连接示意图
CAN 总线监控系统的所有电路板核心MCU 处理器是STM32F107VCT6,该处理器基于ARM V7 架构的Cortex-M3 内核,主频72Mhz,内部含有256K 字节的FLASH 和64K 字节的SRAM。链接与CAN 总线上的各种功能的电路板,通过STM32F107VCT6自带的CAN 接口芯片,在电路板上设计以CAN 信号隔离器,就能挂接到CAN 总线上。通过这4 中电路板,系统实现工业现场各种信号的采集和外围设备的控制。
1.2 数字语音系统设计
系统的硬件电路包括AMBE-1000 电路设计、CSP1027-S 电路设计、音频输入输出电路设计、DMA5601 语音芯片电路设计等部分功能电路。
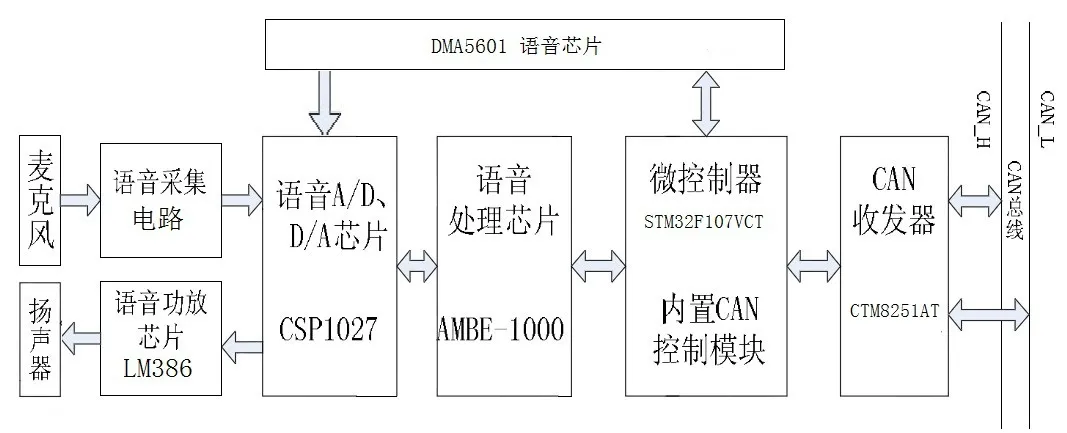
图2 STM32 系统语音功能设计结构图
数字语音系统的工作原理如图2 所示。在系统中,模拟语音数据有2 个来源:一个是DMA5601 芯片输出的模拟语音数据流,另一个是由外部麦克风直接输入的模拟语音数据流。在不同的STM32 电路板上,AMBE-1000 数字语音系统的模拟语音数据源不同。STM32 主控板的模拟语音数据源是DMA5601 芯片提供的,STM32 电话板的模拟语音数据源是麦克风提供的。
STM32 数字语音系统的工作原理是:由麦克风或DMA5601芯片提供的模拟语音数据经过语音采集电路送到CSP1027 进行A/D 转换得到数字语音信号;CSP1027 将A/D 转换后的数字语音信号传送给AMBE-1000;AMBE-1000 通过其内部的编码器将数字语音信号进行编码,得到压缩了的编码语音数据,然后将编码语音数据传送给STM32 微控制器;STM32 微控制器将编码语音数据经过程序逻辑处理后,得到CAN 协议的压缩数字语音数据,然后将其通过其内置CAN 控制器传送到CAN 收发器;CAN 收发器将CAN 协议的数字语音数据发送到CAN 总线上实现模拟语音数据的远传。
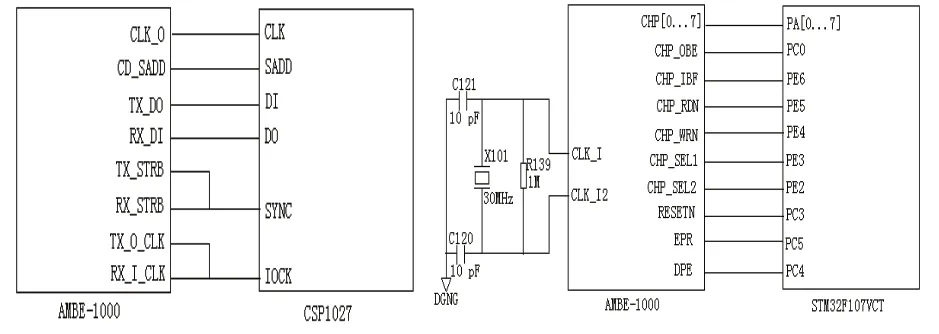
当CAN 总线上有了通讯数据后,CAN 收发器接收数据后传送给STM32 芯片的内置CAN 控制模块,STM32 芯片CPU 从其CAN 控制器中提取所接收的数据进行处理;当所接收的数据为压缩的数字语音数据时,STM32 控制器会将该语音数据以并口(或串口)的方式传送给AMBE-1000 语音编码/译码芯片;AMBE-1000 首先进行数据译码得到数字语音数据,然后将数字语音数据传送给CSP1027 进行D/A 转换;CSP1027 将经D/A 转换得到的模拟语音数据流传送给语音运放芯片LM386 进行信号放大;LM386 输出的放大功率的语音信号通过扬声器得到声学的语音。AMBE-1000 同STM32 的接口电路如图3(B)所示。
2 基于ARM 的CAN 总线系统设计
2.1 CAN 总线通讯系统设计
CAN 总线可以以较低的成本、较高的实时处理能力,在恶劣的强电磁干扰环境下可靠地工作。CAN 总线具有较高的效率是因为总线仅仅被那些请求总线、但悬而未决的站利用,这些请求是根据报文在整个系统中的重要性按顺序处理的。CAN 控制器工作于多主方式,网络中的各节点都可根据总线访问优先权 ,采用无损结构的逐位仲裁的方式竞争向总线发送数据。CAN协议废除了站地址的编码,而代之以对通信数据进行编码,这可使CAN 总线上不同的节点同时接收到相同的数据。
本系统应用CAN 总线技术、音频信号处理技术、传感信息智能感知处理技术和多种网络的网络接入技术,解决监测监控系统在10Km 距离的信号传输问题、复杂环境下的语音信号高分贝、清晰传输和多传感器信息采集、控制处理问题。
采用双CAN 总线通信技术,通过将传感器信息采集及控制传输总线与数字语音传输总线在物理结构上分开架设,而核心处理中又合为一体的网络构建方法,使得双CAN 总线传输网络的通信更加安全可靠。在双CAN 总线传输网络沿线开发智能感知传输平台,该平台集数据检测传输、语音播报、语音呼叫、综合保护、网络连接等功能为一体,同CAN 总线监控系统协调工作,可以更快速、可靠地实现整个系统的综合自动化控制。
2.2 CAN 总线通讯协议设计
系统CAN 总线的数据链路层和物理层直接继承标准的CAN通讯技术,但由于要满足超长距离的通讯要求、随机数据通讯的可靠性要求,使得系统无法直接使用CANopen、DeviceNet、CANaerospace 等典型的CAN 应用协议。因此,本系统中,我们需要进行CAN 通讯协议的开发与设计。主板同CAN 总线上其他设备的CAN 通讯协议设计如下表1 所示。

表2 主控板与电话板、闭锁板及尾端板通讯协议
2.3 CAN 总线上的数字语音及语音仲裁设计
系统约定,同一个时间里,CAN 总线上的语音信息只能是一个语音设备发出的信息。所以,CAN 总线上的语音系统设计有一个仲裁机制来实现此语音仲裁功能。结合CAN 总线的自诊断防冲撞和自恢复的功能,使的系统的语音系统更加的可靠。
[1]李宁,基于MDK的STM32处理器开发应用,北京航空航天大学出版社,2008.10.
[2]MCU技术支持,STM32F系列ARM内核32位高性能微控制器参考手册,意法半导体(中国) ,2010,1.
