路段拥挤条件下的高速公路匝道协调控制方法
2013-12-22高祥云
柴 干 高祥云
(东南大学智能运输系统研究中心,南京 210096)
随着高速公路车辆保有量的增长,路段拥挤状况不断出现.当路段出现拥挤时,会形成道路瓶颈,产生严重的车辆延误现象[1].若未对拥挤路段进行及时控制,上游车辆对其不断冲击将导致交通环境恶化,降低路网交通的整体效益.缓解交通拥挤,提高运营效率与安全性,已经成为亟待解决的现实问题[2].研究表明,匝道协调控制是缓解高速公路拥挤的最有效控制方式[3].开展拥挤条件下的匝道协调控制方法研究,对缓解拥挤、提高通行能力具有理论与工程应用价值.匝道协调控制主要包括最优控制、多变量控制、模糊控制和启发式控制.最优控制通过优化性能指标,使主线交通处于期望状态[4],但算法复杂、计算量大,难以建立拥挤下的控制方案.多变量控制使交通状态维持在设定值附近,含有反馈机制,可减少误差并抵抗干扰,但拥挤时控制效果并不理想[5].模糊控制不需要抽象模型,利用专家经验克服原始数据的误差[6],但对于多个匝道的协调控制,模糊规则呈指数增加,难以应用于实际中.启发式控制无需确定控制目标,基于经验和实测数据,采取局部与协调结合的方法生成调节率,技术复杂性低、可实施性好[7].
启发式协调控制方法已经成功应用于美国高速公路的匝道控制中[5].其中,Zone算法具有实时性与灵活性,但由于控制目标不清楚且没有充分考虑交通突变,难以应对交通拥挤;Helper算法无需准确的OD信息和交通流模型,但由于缺乏优化目标,难以实现优化控制,并且不具备预测机制,难以避免时滞引起的控制误差.Swarm算法依据预测交通参数识别交通瓶颈,期望在萌芽阶段消除交通拥挤;但是该方法需要准确的预测模型和精确的OD数据,才能实现调节率的合理选择.Bottleneck控制方法具有实时性、灵活性和逻辑简单等特点,可通过改进控制策略的鲁棒性和时滞性,提高解决路段交通拥挤的有效性.
为了充分利用Bottleneck控制方法的优点,克服其缺陷,以解决拥挤条件下的匝道控制问题,本文依据拥挤持续时间内交通流波阵面向上游移动的距离,推导拥挤影响范围,获得需要调节的匝道数.然后,通过变换控制变量,对局部调节率和协调调节率进行优化,获得改进的Bottleneck控制方法,克服原方法超调量过大、调节时间过长的缺陷.
1 Bottleneck控制方法
1.1 局部调节率
通过测得匝道上、下游邻近处的占有率,根据调节率-占有率曲线,采用在线查表法[8]确定该匝道的局部调节率,即
(1)
式中,R(j,k)为周期k内匝道j的局部调节率;Pu,Pv分别为占有率-调节率曲线上控制点u,v的相应占有率;Ru,Rv为Pu,Pv对应的调节率;P(j,k)为周期k内匝道j上游的主线占有率.
1.2 协调调节率
若路段i下游占有率超过阈值,出现交通瓶颈,则
P(i,k-1)≥Pc(i)
(2)
Qup(i,k-1)+Qon(i,k-1)≥Qoff(i,k-1)+
Qdown(i,k-1)
(3)
式中,P(i,k-1)为周期k-1内路段i的下游占有率;Pc(i)为路段i的下游占有率阈值;Qup(i,k-1),Qdown(i,k-1)分别为周期k-1内路段i的上、下游流进交通量;Qon(i,k-1),Qoff(i,k-1)分别为周期k-1内路段i内的入、出口匝道流出交通量.
针对每一个瓶颈路段i,计算其上游各入口匝道调节率的降低总量,并按照经验权重将降低总量分配至相关入口匝道.权重系数根据上游入口匝道到路段i的距离设定,即
Qreduction(i,k)=[Qup(i,k-1)+Qon(i,k-1)]-
[Qoff(i,k-1)+Qdown(i,k-1)]
(4)

(5)
式中,Qreduction(i,k)为周期k内路段i上游关联入口匝道流入的降低流量;Rreduction(j,i,k)为周期k内路段i上游关联入口匝道j流入的降低流量;n为需要协调的匝道数;Wji为路段i上游关联入口匝道j的权重系数.各瓶颈路段的影响区域可能发生重叠,每个入口匝道常会处于不同瓶颈路段的影响区域中.因此,需要选取各瓶颈路段的入口匝道流入交通降低值中的最大值,作为各个匝道的协调调节率,即

(6)
式中,Qon(j,k-1)为周期k-1内匝道j的实际流入量;r(j,k)为周期k内匝道j的协调调节率.
1.3 最终调节率
将局部层面和协调层面上匝道j的调节率R(j,x)和r(j,k)进行比较,取最小值作为匝道j的最终调节率Rend,即
Rend=min[R(j,k),r(j,k)]
(7)
Bottleneck控制方法的不足在于:① 协调层面上,缺乏需要调节的入口匝道数量和位置的准确表达式.② 主线最大流量随时间、天气等因素的变化而变化,故将流量作为控制变量,难以确切反映主线的交通瓶颈;临界密度则相对稳定且不受天气等因素的影响,故将密度作为控制变量,适于反映主线的交通拥挤状态.③ 频繁对局部调节率和协调调节率取极小值,易形成主线交通运量的欠载或过载现象.
2 改进的Bottleneck控制方法
2.1 控制匝道数的识别
根据路段拥挤时交通波运行机理,应用Greenshields模型推导拥挤影响范围,并结合匝道桩号确定所需调节的匝道数与位置.设ρi为路段i的堵塞密度,路段i有2个相邻且不同密度的区域ρi1和ρi2,用垂直面S加以分割(称S为波阵面);交通波的波速为ω,且按图中箭头x方向运行(见图1).
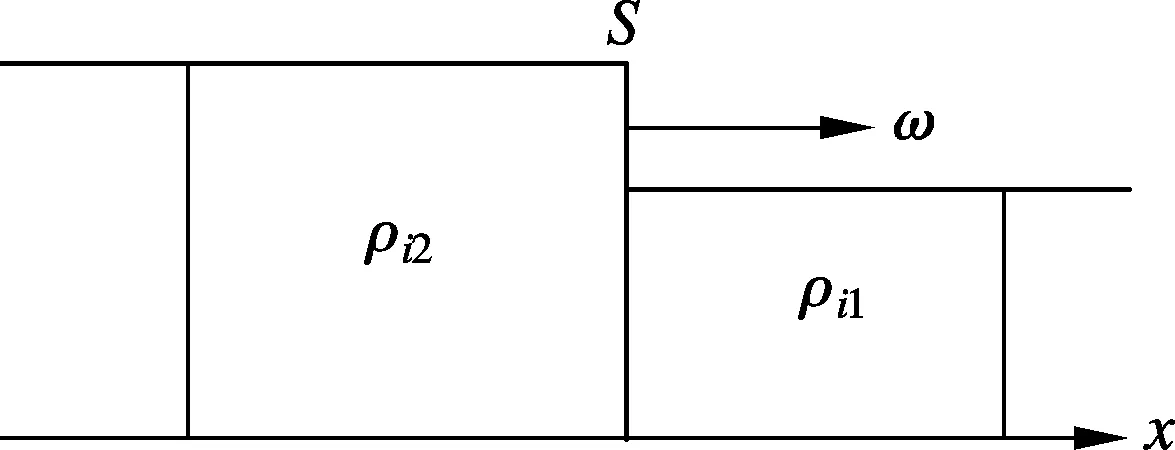
图1 交通波示意图
高速公路发生拥挤致使车辆难以通行时,上游车辆将在波阵面S处开始排队.根据交通波波速和Greenshields模型的车流速度-密度线性关系,求得拥挤点上游影响范围L为
(8)
式中,μf为自由流车速;T为拥挤持续时间.
拥挤状态下的匝道控制即是对拥挤点上游流入交通进行控制.从探测到拥挤时刻开始,就需要估计匝道控制范围,确定需要进行协调的匝道数n,其计算公式为
n={L,Xn}
(9)
式中,Xn为波阵面上游第n个匝道的桩号.传统的匝道协调方法没有给出需调节的匝道数量与位置,故实际操作性不强.此处定义XS为波阵面桩号,在[XS,XS+L]内,得到用于辨识匝道数n及其位置的表达式为
(10)
n的确定还与高速公路具体的结构有关.当L相同、匝道间距不同时,n的取值一般不同.
2.2 匝道流入交通降低量的确定
控制变量是反映交通控制系统特性的关键参数,其选取的合理性直接关系到控制效果.本节将依据流量与密度的关系,阐述应用密度代替流量作为控制变量的原理,并采用比例积分控制方法,推导流入交通降低量的表达式.交通流量和密度的关系如图2所示.图中,ρm为最大流量qm对应的密度.任一流量值q对应2个密度值ρi1和ρi2,前者小于ρm(即位于不拥挤区域),后者大于ρm(即位于拥挤区域).交通拥挤时,事发点上游密度变大,下游密度变小,而上、下游交通量的计算值可能相差并不大[9],故Qreduction可能很小.若按照经验权重将Qreduction分配至各个关联匝道,则难以实现拥挤条件下的控制效果,故需要对Qreduction的计算公式进行改进.
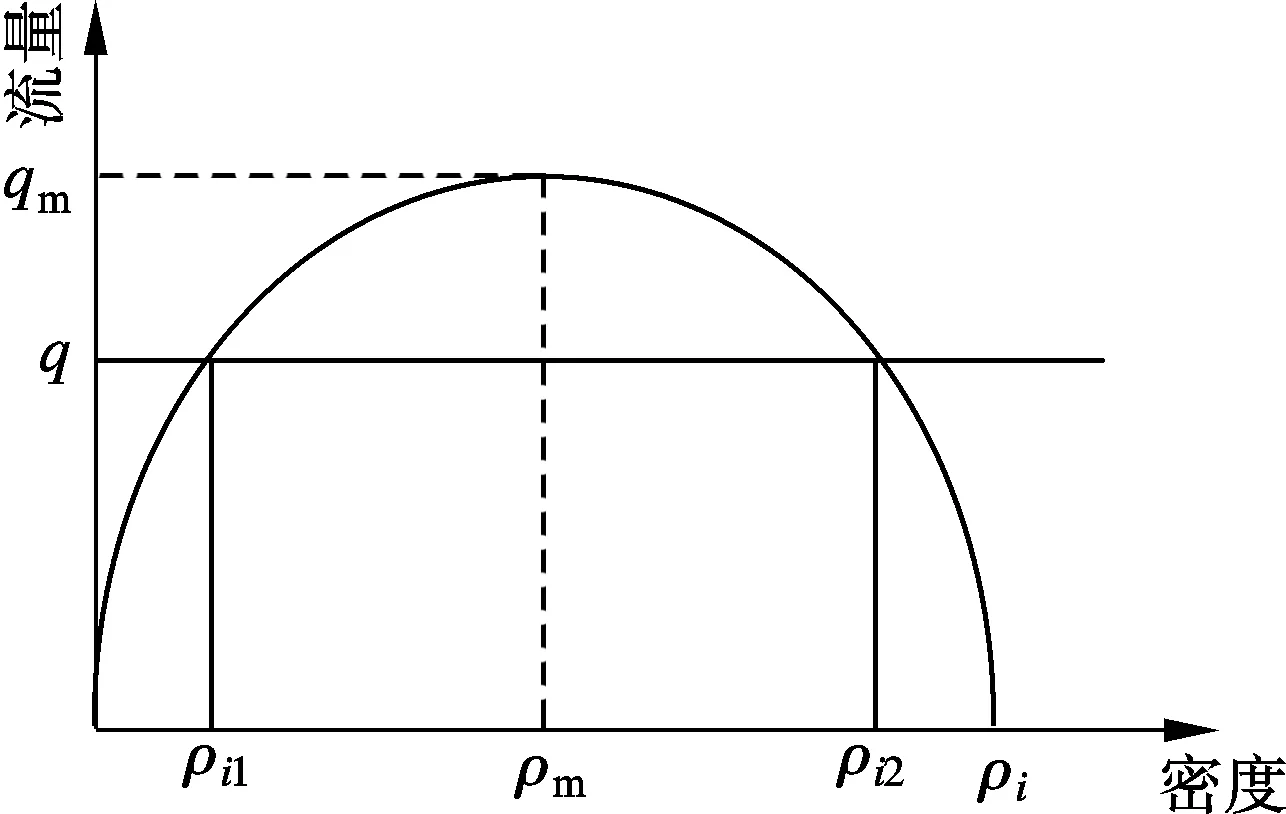
图2 交通流量和密度的关系图
PID控制器采用反馈控制方式控制变量与期望值的误差,其积分单元用于消除稳态误差,比例和微分单元用于加快控制反馈.由于微分项产生冲击效应,PID控制器常用于反馈速度较慢的系统[10].将密度作为控制变量,则
Qreduction(i,k)=-[K1e(i,k)+K2(e(i,k)-e(i,k-1))]
(11)
式中,K1,K2为PID的控制参数[11],由实验获得;e(i,k)为周期k内的控制误差.将e(i,k)=ρd-ρS(i,k)代入式(11)可得
Qreduction(i,k)=-(K1+K2)[ρd-ρS(i,k)]+
K2[ρd-ρS(i,k-1)]=-K1ρd+
(K1+K2)ρS(i,k)-K2ρS(i,k-1)
(12)
式中,ρd为拥挤点上游的期望密度;ρS(i,k)为周期k内路段i中波阵面S的上游密度.
将式(12)代入式(5),则
Rreduction(j,i,k)=[-K1ρd+(K1+K2)ρS(i,k)-

(13)
2.3 最终调节率的优化
路段拥挤时,Bottleneck控制方法取局部调节率与协调调节率中的较小值,这样虽然可以迅速减小路段密度,但当路段没有发生拥挤或交通密度小于期望密度时,容易使超调量过大,并产生较长的调节时间.对其进行改进的思路为:当被调密度大于期望密度时,按照最严格的方式调节(取局部调节率与协调调节率中的较小值);当实际密度小于期望密度时,对调节率进行重新取值,最终调节率取局部调节率和协调调节率的加权组合,即
(14)
式中,ρtarget=35 pcu/(km·lane)为路段i的密度理想值[11];αj为匝道j的比例因子,且0≤αj≤1.
3 仿真示例与分析
选取宁杭高速溧阳西至丁山6个路段作为示例路径,路径拓扑图见图3.
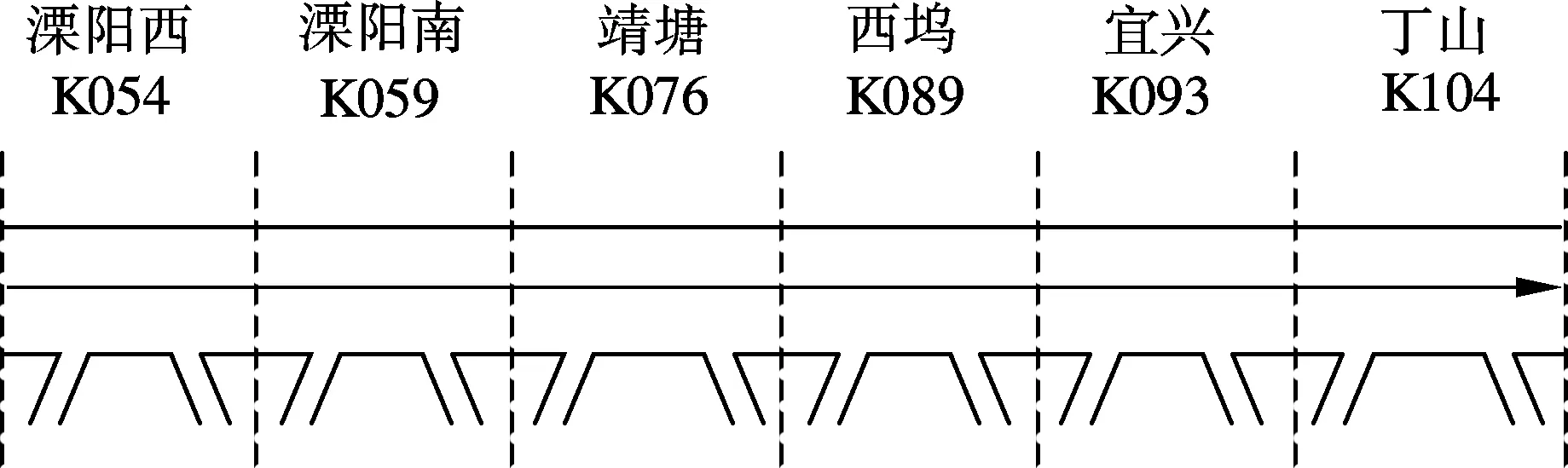
图3 宁杭高速公路路径的拓扑图
3.1 参数初始化
交通拥挤发生时,检测器检测到的各路段密度和调节率初值见表1.由表可知,第6路段(即丁山路段)的密度大于期望密度,发生拥挤.

表1 各个路段的初始密度与初始调节率
根据该路段交通运行的基本状况,设期望密度为35 pcu/(km·lane);上游主线进入的流量平均值为6 000 pch/h;仿真步长为20 s;仿真时间为2 000 s.仿真实验中,K1=97,K2=29时,期望密度的动态跟踪性能较好.对宁杭高速上296起碰撞或抛锚等事件持续时间进行统计分析,取事件持续时间T=60 min,代入式(8)得事件影响范围为19.6 km.根据式(10)得事件影响范围内的匝道为丁山、宜兴和西坞.协调层面的调节率分配权值可根据匝道与拥挤断面的距离决定,离拥挤断面越远,匝道承担的调节率降低值越小.
3.2 比例因子的敏感性分析
根据改进的Bottleneck控制方法,应用数字仿真技术,分别对丁山、宜兴、西坞3个入口匝道的比例因子αj(j=1,2,3)进行敏感性分析.当αj=0,0.2,0.4,0.6,0.8,1.0时,相应路段密度随时间变化的曲线见图4.
当权重系数为1.0时,密度曲线快速且平稳地变化,超调量小,调节时间少,几乎无振荡,控制效果最为理想,可以使路段交通密度快速平稳地达到所期望的目标值.
由此可知,针对本示例,式(14)实际演变为
(15)
3.3 控制算法的比较
采用Bottleneck控制方法、改进的Bottleneck控制方法以及未施加控制方法时,对拥挤路段及其上游相邻路段进行仿真分析,路段车流密度随时间的变化轨迹见图5.由图可知,未施加控制方案时,3个路段的拥挤状况随时间延长而加剧,并逐步影响上游各路段.在路段发生拥挤时,利用Bottleneck控制方法,取局部调节率与协调调节率中的较小值可以迅速减小路段密度.当路段没有发生拥挤时,仍然采用局部调节率与协调调节率中的较小值,将产生较大的超调量和较长的调节时间.控制变量需要经过1 500 s才能稳定在理想密度上,且期望密度与路段密度的最大绝对误差达到11 pcu/(km·lane).利用改进的Bottleneck控制方法,能够迅速使拥挤的第6路段(丁山段)在450 s时消散拥挤,达到平稳交通流状态.由于采取了优化的匝道调节率,有效避免了原Bottleneck控制方法的不足,使调节时间减少70%,超调量减小75%,无余差且几乎无振荡.利用该方法不仅能迅速疏导路段拥挤,而且能够使拥挤路段的上游路段密度快速趋向期望密度,保持路径上交通流运行的通畅与稳定.
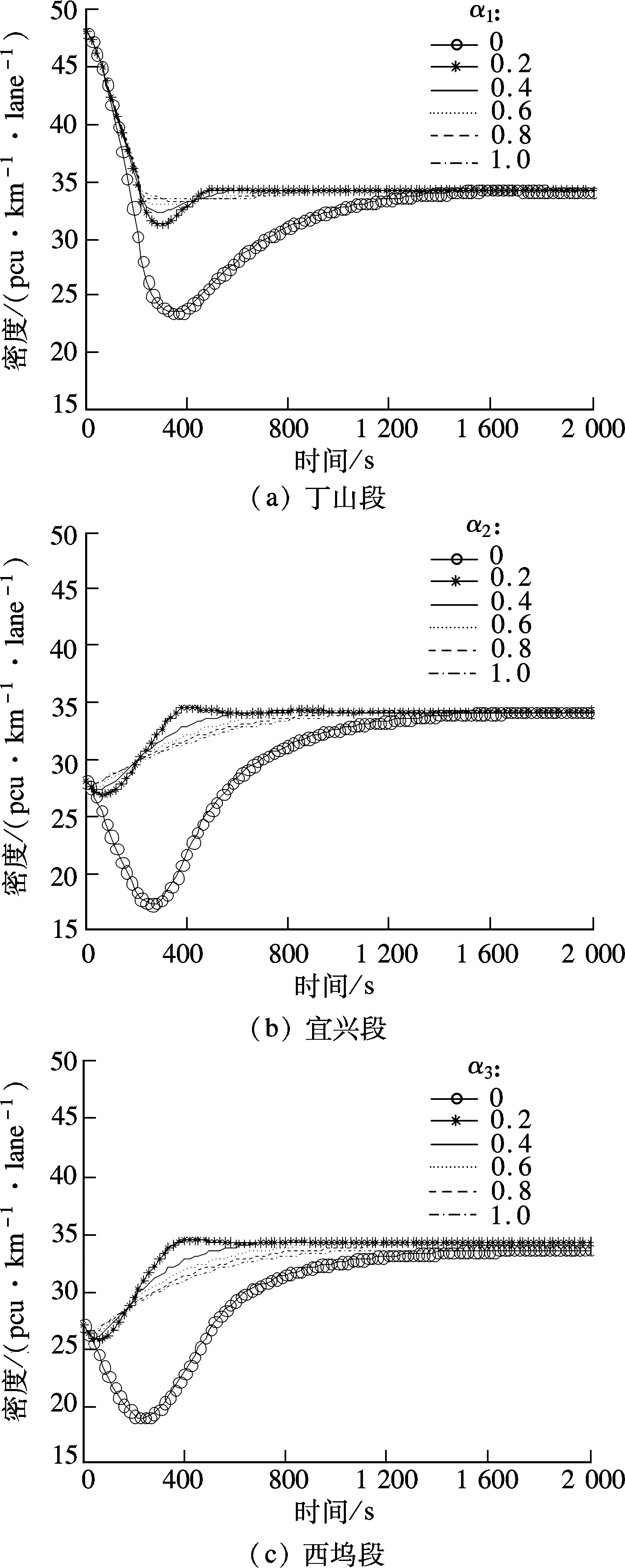
图4 比例因子的敏感性分析
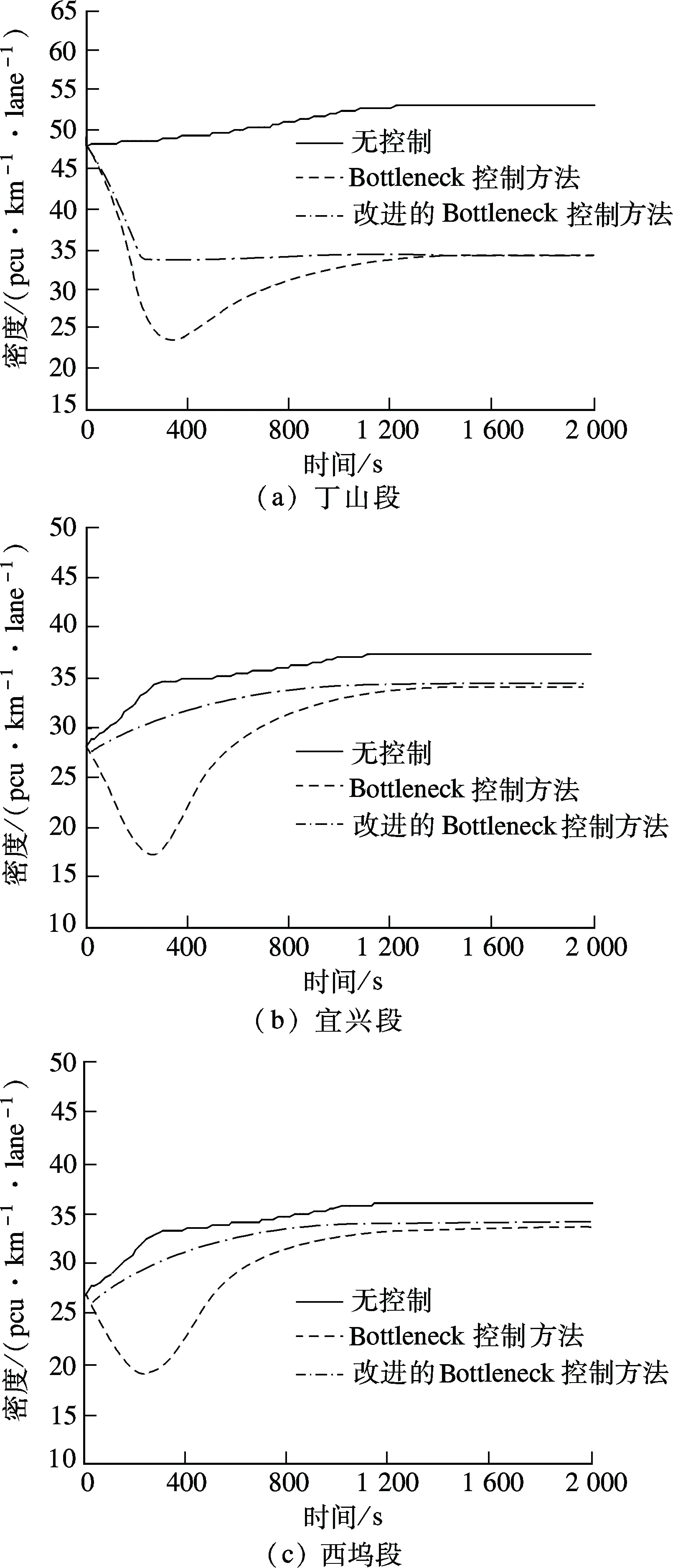
图5 控制方法的比较结果
4 结语
基于交通波理论推导的交通拥挤影响范围,能够辨识影响范围内需要协调控制的匝道数量及位置,为改进Bottleneck控制方法提供关联入口匝道权重系数的计算依据.针对Bottleneck控制方法使用流量累积判别动态交通状况,难以检测主线交通拥挤状态的缺陷,以密度代替流量作为控制变量,设计PID控制器,构建改进的Bottleneck控制方法,从而将流量囤积调节转变为密度拥挤控制.调节路段流量累积,使控制变量接近期望值时会产生调节过度现象,通过对局部调节率和协调调节率进行组合,确定优化的最终调节率,则可解决调节过度的问题.
)
[1]Papamichail I,Papageorgiou M.Heuristic ramp-metering coordination strategy implemented at monash freeway[J].TransportationResearchRecord,2010,2179: 10-20.
[2]张海军,张钰,杨晓光.异常事件下高速道路交通状态的分析与仿真[J].交通运输工程学报,2008,8(2):116-121.
Zhang Haijun,Zhang Jue,Yang Xiaoguang.Analysis and simulation of traffic state on expressway during incident[J].JournalofTrafficandTransportationEngineering,2008,8(2): 116-121.(in Chinese)
[3]Chai Gan,Xie Yongli.A genetic-fuzzy control application to ramp-mainstream joint coordination control of the freeway[J].AdvancedScienceLetters,2012,7: 369-374.
[4]Kotsialos A,Papageorgiou M,Mangeas A.Coordinated and integrated control of motorway networks via nonlinear optimal control[J].TransportationResearchPartC:EmergingTechnologies,2002,10(1): 65-84.
[5]Papageorgiou M,Kotsialos A.Freeway ramp metering: an overview[J].IEEETransactionsonIntelligentTransportationSystems,2002,3(4): 171-181.
[6]温凯歌,曲仕茹,张玉梅.基于模糊逻辑的高速公路入口匝道控制方法[J].中国公路学报,2007,20(6): 100-104.
Wen Kaige,Qu Shiru,Zhang Yumei.Method for freeway on-ramp control based on fuzzy logic[J].ChinaJournalofHighwayandTransport,2007,20(6): 100-104.(in Chinese)
[7]Papamichail I,Papageorgiou M.Traffic-responsive linked ramp-metering control[J].IEEETransactionsonIntelligentTransportationSystems,2008,9(1): 111-121.
[8]Jacobsen L,Henry K.Real-time metering algorithm for centralized control[J].TransportationResearchRecord,1989,1232: 17-26.
[9]Zhang H M.Coordinated Traffic responsive ramp control via nonlinear state feedback[J].TransportationResearchPartC:EmergingTechnologies,2001,9(5): 337-352.
[10]Sheu J B.Stochastic modeling and real-time prediction of vehicular lane-changing behavior[J].TransportationResearchPartB:Methodological,2001,35(7): 695-716.
[11]梁新荣,刘志勇,徐建闽.高速公路多匝道协调控制系统设计与仿真[J].信息与控制,2005,34(3):308-311.
Liang Xinrong,Liu Zhiyong,Xu Jianmin.Design and simulation of coordinated ramp control system on freeway[J].InformationandControl,2005,34(3): 308-311.(in Chinese)