悄无声息的天外机动
2013-12-07陈奕卓
□ 陈奕卓

“轨道快车”验证卫星维修技术,包括交会、捕捉、对接,以及燃料转移和电池更换
去年年底,高度机密的X-37B再次升空,到太空秘密游荡。它在执行什么使命?美国空军发言人讳莫如深地表示:“验证空间飞行性能,证明重复使用的实用性和成本效益。”这只是新型空间机动平台的“冰山一角”,空间较量的天幕早已拉开……
循序渐进的“民掩军”
到目前为止,只有美国开展过新型空间机动平台有关项目的在轨飞行演示验证。
2003年,美国海军研究实验室的“试验卫星系统项目”10(XSS-10)成功进行了在轨试验。试验过程中,与火箭上面级分离后,XSS-10在距离上面级数百米的范围内进行绕飞、接近等轨道机动,在同一轨道面指定的4个位置对上面级进行拍照和状态检测,并将获得的数据成功下传。
2005年,美国空军成功进行了XSS-11任务的飞行试验。XSS-11环绕其运载器“米诺陶”1火箭上面级飞行超过75圈,与上面级在0.5千米~1.5千米距离先后实施3次交会。
2005,美国航宇局的“自主交会技术验证卫星”(DART)与在同一轨道面内的“多路径超视距通信卫星”实现了交会,接近到距离5米的位置,并利用星上的制导敏感器和GPS导航信息完成几次近距离机动。虽然DART与目标卫星在交会阶段发生了碰撞,但该次验证仍然实现预期目标。
2007年3月~7月,美国国防部高级研究计划局、空军和美国航宇局联合完成了“轨道快车”项目的在轨演示验证。作为新型空间机动平台的“太空自动化运输机器人”与目标星成功完成了在同一轨道面内以轨道机动为支撑的空间操作。在交会、逼近、位置保持的基础上进行了捕获、常温推进剂加注、模块更换等操作。该次演示验证被认为是新型空间机动平台发展史上的里程碑事件,标志着在同一轨道面内以轨道机动为支撑的空间操作技术逐步走向成熟。在进行在轨飞行试验以前,美国国防部高级研究计划局开展了充分的轨道快车概念方案研究论证和大量的地面试验,从2004财年至2007财年,不惜两次推迟在轨试验,为最终试验的成功奠定了坚实基础。
“自主交会技术验证”飞行器与“多路径超视距通信”卫星交会示意图
2010年~2012年,美国空军成功完成了X-37B空间机动飞行器验证机的两次验证飞行。虽然美国空军没有具体公布X-37B的轨道参数,但根据国外天文爱好者的观测数据,两次试验中X-37B的轨道高度均有较为明显的改变,但轨道倾角基本上没有变化。这表明在同一轨道面内以轨道机动为支撑开展空间操作后可实现重复使用的新型空间机动平台技术获得验证。美国空军于2012年12月11日开始了第三次X-37B飞行试验,使用的是第一次进行飞行试验的X-37B飞行器,以进一步验证其重复使用性能。

2012年6月16日第2架X-37B在轨神秘飞行469天后成功着陆加利福尼亚州范登堡空军基地

能灵活拿起钢笔的机械手
从上面可看出,美国在新型空间机动平台的发展方面选取了两种不同的技术途径,但都是循序渐进的发展思路。一种是在同一轨道面内进行机动与操作的空间平台技术,另一种是在不同轨道面内进行机动与操作的空间平台技术。两种技术途径下又可以再各划分三个类型,一是专注于进行轨道机动;二是以轨道机动为基础开展空间操作;三是以轨道机动为基础开展空间操作后返回地面实现重复使用。
美国新型空间机动平台的发展一直是以满足空间攻防对抗的需求为牵引的,具有重要的空间攻防应用潜力。为己方航天器补充燃料、更换故障部件,能够有效提升卫星的机动能力和生存性能。机动能力的增强使得卫星可以经常改变轨道位置,实施对目标的机动侦察,增强躲避攻击的能力;也可实现由较少卫星构成局部的机动侦察网络来完成以前不能完成的任务。此外,新型空间机动平台所具备的交会、逼近、位置保持、捕获等能力也可用于反卫星武器,以捕获、打击、摧毁敌方的航天器。

2005年4月11日发射的XSS-11用于试验反卫星武器
艺术家描绘的“凤凰”项目概念图之一
不断融入创新性要素
新型空间机动平台与传统的卫星相比有两个重要的区别:一是在空间机动能力和灵活性方面较传统卫星有显著地提高;二是新型空间机动平台能够装备机械臂以及推进剂加注等专用设备,完成各种灵活的空间操作。性能的复杂新颖性,注定需要诸多创新性要素不断融入其发展之中,因此,新型空间机动平台的发展往往是和具有创新性的技术、概念结合在一起的。
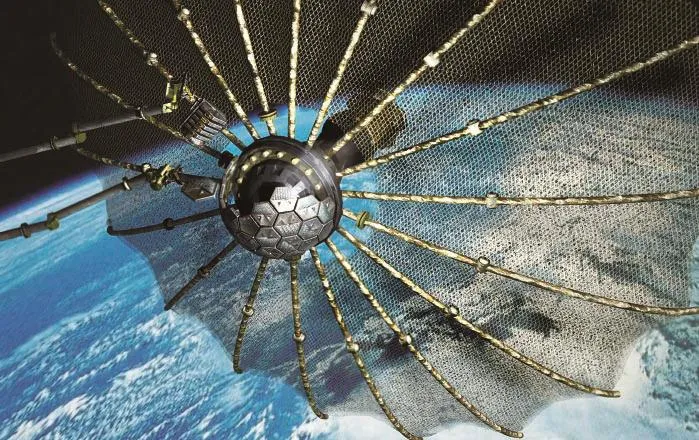
美国国防部高级研究计划局在2011年正式启动了“凤凰”项目,其中的服务航天器平台设计能承载1000千克的有效载荷。与之前 “轨道快车”等低轨道空间操作平台不同的是,该平台被要求在地球静止轨道(GEO)进行轨道机动接近目标卫星。第一,要用机械手工具抓取处于自由飞行状态的有效载荷轨道交付系统,安放在平台工具箱中;第二,执行空间机动接近另一颗位于GEO轨道的目标卫星,并用机械手工具抓取目标星进行对接;第三,利用机械手工具抓取平台工具箱中包括细胞化卫星在内的工具安装在目标星的天线上;第四,将目标星天线切割下来并拖拽至预定位置。这是一个技术创新的集合体,计划中还包含了细胞化卫星这种新的卫星设计和应用理念、寄宿有效载荷、空间碎片清除、空间资源的重复利用等新的要素。

艺术家描绘的“凤凰”项目概念图之二
美国空军研究实验室太空运载指挥部在2012年10月授予美国轨道科学公司一份为期五年、价值3200万美元的合同,用于开发有能力搭载多个有效载荷,并在地球同步轨道和低地球轨道都能运行的新型空间机动平台。这种平台称为“鹰”(EAGLE),EAGLE是渐进一次性运载火箭次级适配器增强同步实验室实验的英文缩写。“鹰”平台可以由“宇宙神”5以及“德尔它”4火箭发射,其结构包括一个六端口标准型ESPA环,轨道科学公司希望“鹰”平台有能力搭载6个有效载荷,在同步轨道停留至少一年。“鹰”平台可以携带足够的推进剂,将有效载荷部署到不同的位置。轨道科学公司称用户最初的设计需求是容纳4个有效载荷,但该公司的创新设计节省出了足够两个有效载荷使用的空间。美国空军将在2017年左右进行这种新型空间机动平台的演示验证,将突破原有平台只在低地球轨道上进行验证的情况。
从广州出发飞 行了16个小时,再坐上2小时的大巴,穿越一片片平坦开阔的葡萄园、橄榄园,路过一栋栋白色或浅黄色的石屋,终于抵达普利亚产区的中心城市:曼杜里亚。此时接近正午,阳光正好,清劲的海风扑面而来,一下子驱散了长途旅行的不适。空气中弥漫着橄榄香、泥土香,暖暖的,非常惬意。放眼望去,都是狭窄的石头街道、古老的石头房子和教堂,街上行人寥寥。

国际空间站机械臂伸手去抓逼近的日本HTV-2货运飞船
跨部门合作演示验证
新型空间机动平台融合了诸多新技术,具有较强的探索性和风险性。美国在发展新型空间机动平台的过程中采取了跨部门合作的方式,通过力量汇聚开展技术攻关和演示验证。其中最典型的两个重点项目是“轨道快车”项目和X-37B空间机动飞行器项目。
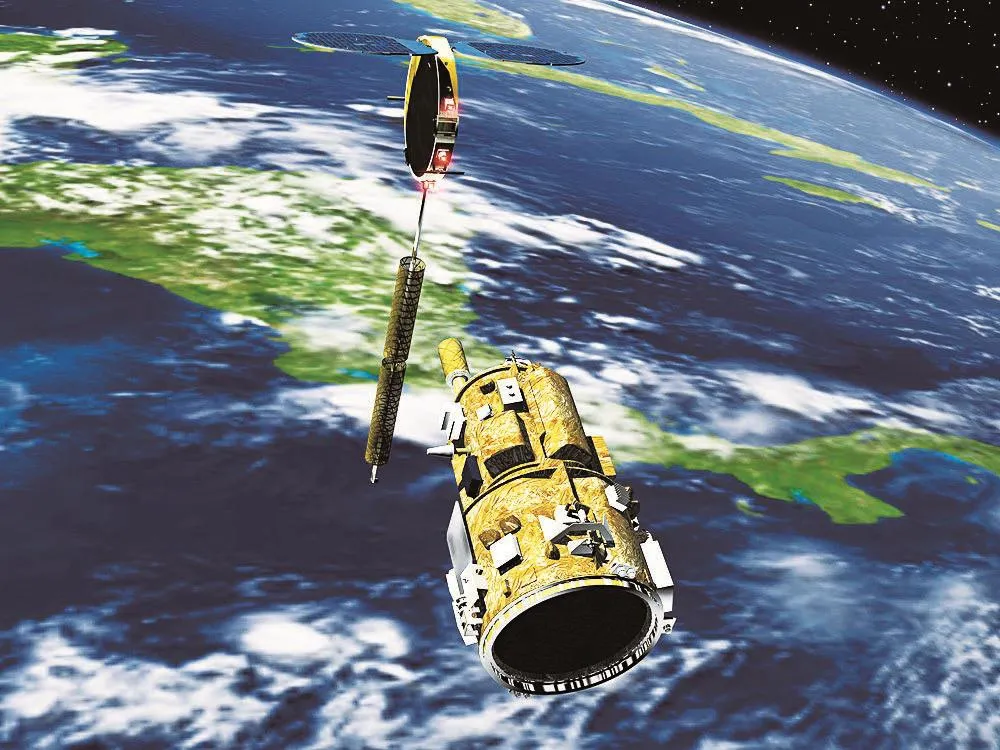
“轨道快车”项目最初是由美国国防部高级研究计划局提出的,美国国防部高级研究计划局也一直作为该项目的牵头实施单位。在实施过程中美国空军、美国航宇局逐步参与其中。美国空军不仅为轨道快车提供运载器,而且提供了跟踪、测控等地面运行服务支持。美国航宇局从2004财年开始即加入了“轨道快车”项目,一方面在项目中试验部分传感器和软件,目的是降低轨道空间飞机在自主交会和逼近操作过程中的风险以及未来对国际空间站进行商业补给操作的风险;另一方面为项目提供传感器和软件技术支持,这些产品和技术原本是为降低哈勃空间望远镜机器人服务任务风险所研制的。美国航宇局还提供了空间站机械臂方面的技术以支持研制“轨道快车”机械臂。此外,“轨道快车”的推进系统与美国航宇局的“自主交会技术验证卫星”DART的推进系统有很强的继承性。
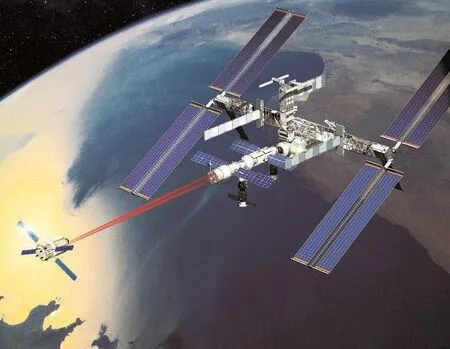
欧洲自动转移飞行器与国际空间站交会示意图
X-37B空间机动飞行器项目的合作研制特点更加突出,这也是由X-37B的技术难度大、风险高所决定的。自从1999年项目正式启动以来,先后由美国空军、美国航宇局和国防高级研究计划局等多个单位负责管理。虽然每个单位在管理过程中的对项目要求的侧重点不尽相同,但客观上形成了一种接力棒式的合作研制模式。X-37B项目一开始由空军研究实验室负责管理;1999年7月~2004年9月,转由美国航宇局负责管理,由空军研究实验室辅助;2004年9月~2006年9月,转由国防部高级研究计划局负责,进行了高空高速无动力飞行进场着陆试验;2006年9月至今,由空军快速能力办公室负责管理,进行轨道飞行器的研制和试验。实际上在X-37B管理权的不断转移过程中,空军、美国航宇局和美国国防部高级研究计划局都没有离开X-37B项目,合作关系一直存在。

2000财年~2012财年美国国防部高级研究计划局新型空间机动平台的投资
在欧洲方面,欧空局、德国航天局和欧洲航空防务航天公司的合作一直没有间断,共同开展了自由飞行机器人系统项目、静地轨道复位者航天器项目、德国轨道服务任务项目等三个重点项目的研制工作。其中自由飞行机器人系统项目还是欧空局、欧洲航空防务航天公司和俄罗斯巴巴金空间中心三家研究机构合作进行的,采用了俄罗斯的多功能轨道推进平台。
由此看来,在新型空间机动平台领域特别是技术复杂程度高的项目一般采取了跨部门合作的方式,不仅能凝聚各方力量,而且保证项目目标的顺利实现。

“自主太空运输机器人轨道器”(左)与“未来星”交会
为有源头活水来
美国在新型空间机动平台的发展方面进行了长期的规划和投资。正是这种持续的推动使得其新型空间机动平台技术取得了长足进步。
从美国国防部高级研究计划局各年预算可以看出,美国国防部高级研究计划局一直以来都在对新型空间机动平台的发展给予投资。主要包括五个重点项目:“轨道快车”、空间组装和制造、“通用轨道修正航天器”、“前端机器人使能近期演示验证”和“凤凰”计划。不计2013财年预算,2000财年~2012财年美国国防部高级研究计划局在新型空间机动平台方面的总投资为3.3785亿美元。如果将2013财年预算计算在内,总投资额为3.6585亿美元。可以说这一投资额度并不很大,重要的是体现出一种持续性。
美国航宇局在2003财年预算中提出了DART,从2003财年开始~2005财年,共投入该项目1.1亿美元。DART是一种新型的以通过空间机动进行自主交会对接为特征的空间机动平台,美国航宇局期望通过该项目验证自主操作和交会所需的制导、导航与控制软件和硬件,同时验证模拟碰撞规避机动。在2004财年的预算中,美国航宇局为“航天发射倡议项目”申请10.65亿美元经费,其中5.5亿美元用于轨道空间飞行项目,同时支持X-37技术验证。
美国空军在新型空间机动平台方面也有长期的规划发展和资金投入。如X-37B、XSS,但出于保密原因,尚无法获得在这些项目的投入和预算。

在国际空间站上试验的小机器人

军民两用的机器人
知识链接
空间机动平台机动能力量化分析
空间机动平台的机动能力究竟能有多大,与什么因素有关是新型空间机动平台的核心问题之一。目前已经进行的新型空间机动平台在轨演示验证都是在同一轨道面内进行的。
影响机动能力的因素
空间机动平台要进行轨道机动必须要有一定的速度变量,为了获得这一变量需消耗一定质量的推进剂,所消耗的推进剂质量大小与平台质量紧密相关。
空间平台轨道速度大,机动所需的速度变量(ΔV)也很大,需要消耗大量的推进剂。平台能获得的速度变量大小与能进行机动次数的多少取决于携带的推进剂的数量和类型。一般来说在同一轨道面内改变轨道形状或高度所需速度变量较小,而改变轨道倾角即改变轨道平面所需的速度变量较大。

表1 不同类型的空间轨道机动所需的卫星速度变量
空间平台进行一次机动需要为其提供一个速度变量ΔV,而为了获得ΔV需要消耗一定质量的推进剂,至于需要消耗多少推进剂则是由推进技术决定的。速度变量ΔV,获得ΔV所需要消耗的推进剂质量Mp,平台净重Ms(不包括Mp),这三者之间的关系由“火箭公式”决定,其关系见表2。

表2 在使用常规化学推进剂的情况下,ΔV与Mp/Ms的关系
目前的空间机动平台大多采用化学火箭发动机,像电推进、离子推进产生的推力小,没有被应用到新型空间机动平台的主动力系统方面。表3列出了使用常规推进剂技术的情况下,各种空间机动所需要消耗的推进剂质量和航天器自重的比值大小。

美国高速验证机HTV

表3 空间机动所需要消耗的推进剂质量和平台自重的关系
轨道机动能力比较
“空军实验卫星系统”微卫星(XSS-11)的总质量145千克、推进剂质量15千克,Mp与Ms的比值为0.115,能产生约每秒0.3千米的速度变量,可在近地轨道完成一次从400千米到1000千米的轨道高度改变,轨道倾角的改变在3°左右。
“轨道快车”平台总质量952千克、推进剂质量136千克,Mp与Ms的比值为0.167,能产生约每秒0.4千米的速度变量,可完成一次轨道倾角改变5°左右的轨道机动。
X-37B的总质量4990千克、推进剂质量1800千克,其中X-37B需要进行离轨操作,还需要一定质量的推进剂。在不考虑返回的情况下,Mp与Ms的比值为0.564,能产生大约1千米/秒的速度变量。X-37B所实现的最大轨道机动约为一次10°左右的轨道倾角的改变。
这三种新型空间机动平台在完成上述机动后都将消耗掉全部推进剂,无法再进行其他的机动。由此来看,目前已经进行演示验证的新型空间机动飞行器的轨道平面改变机动能力十分有限,难以满足各种不同空间任务的需要,包括部署各种卫星和对地攻击武器,并在某一指定的空间集合地点对卫星进行检查、维修和补充燃料。美国军方最初的这种设想缺乏技术支持。