基于单频GPS精密单点定位算法研究
2013-12-06许文桓
陈 蕾,许文桓
(国核电力规划设计研究院重庆有限公司,重庆 401121)
随着人们对GPS定位精度要求的不断提高,国内外学者已经给出了一些可能的静动态的精密单点定位模型[1-4],在这些定位模型中,为了减少观测误差和噪声,消除电离层误差的伪距和载波相位组合等方法经常用到,然而,这种方法不能保证载波相位的整周模糊度的整数性,这就降低了定位精度,而且这种算法只限于双频GPS。
本文提出了一种针对廉价的单频GPS接收机新的精密单点定位算法,这种算法不需要伪距和载波相位观测量的线性组合,这样就保持了整周模糊度的整数性,提高了定位精度。在这个算法中,L1载波和基于C/A码的伪距用新的GPS回归方程和回归矩阵进行描述,这些回归方程和回归矩阵作为单频精密单点定位的观测模型。由电离层延迟、对流层延迟、卫星轨道误差、卫星钟误差和接收机钟差引起的载波相位和基于C/A码的伪距误差,利用合适的误差模型嵌入到回归方程中,用最小二乘估计所有的未知参数,在估计的过程中,考虑观测噪声的随机属性,提高参数估计的可靠性和缩短收敛时间。此外,由于每一历元的观测数据都可以连续得到,这样就可以应用卡尔曼滤波得到单频精密单点定位回归方程。
1 算法模型
1.1 单频精密单点定位回归方程
将L1载波相位和基于C/A码的观测定位数据公式[5-9]化为

式中:u≡[xu,yu,zu]T为测站位置坐标向量;sp≡[xp,yp,zp]T为卫星P的坐标向量(t)为t时刻测站u到卫星P的伪距;(t)为t时刻L1载波的相位观测值;τpu为测站u到卫星P的信号传播时间;λ1:L1载波的波长,数值为0.190 3m;δIpu(t)、δTpu(t)为电离层、对流层延迟误差;δtu(t)、δtp(tτpu)为接收机在t时刻和卫星在t-τpu时刻的钟差;为L1载波的整周模糊度;为测量误差;rpu(t,t-τpu)为t时刻测站到t-τpu时刻卫星P的几何距离。
为了方便表示将

式中,卫星坐标xp,yp,zp可以通过导航电文得到,但包含有轨道误差,本文通过卫星精密星历轨道化消除了轨道误差,达到了精密定位的精度。定义^sp为已经计算出来的卫星的精确坐标,下面为了算法的简捷叙述将t,t-τpu省略。
由导数关系可以得到

将式(3)在u=,(j=1),sp=^sp进行一阶泰勒展开为

这样式(1)和式(2)转变为

式中:

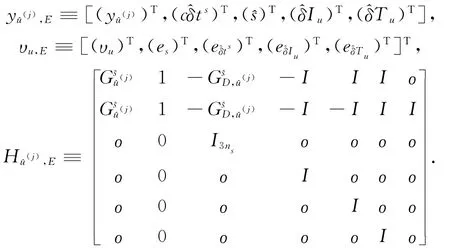
将式(6)和式(7)用向量矩阵表示为

式中:

υu≡[,]T,I定 义为ns×ns单 位 矩阵,0定义为[1,1,…,1]T的ns×1向量。
为了得到θu的最小二乘估计,下面考虑未知参数和回归方程的个数,从上述可以看出未知变量有4+7ns个,即u:3,cδtu:1,s:3ns,cδts:ns,δIu:ns,δTu:ns,NL1,u:ns,而回归方程个数为2ns,这样就得不到θu的最小二乘解。如果已经计算出了卫星的位置坐标s,卫星钟差cδts,电离层改正和对流层改正δIu,δTu。可得

此方程即为单频GPS精密单点定位的观测模型。式中:
在这种情况下,回归方程的个数为8ns,当ns≥4,8ns≥4+7ns,这样就可以计算出未知参数的准确值。当ns<4时,系数矩阵H^u(j),E是奇异的,这时不能够得到θ的确切值。
对于式(10)来说,θu的最小二乘估计值是这样得到的[10-11]:

式中:R≡Cov[υu,E],其误差方差为

1.2 卡尔曼滤波应用于单频精密单点定位
1.2.1 卡尔曼滤波的观测方程
由式(10)可得


式(13)即为卡尔曼滤波的观测方程。
1.2.2 状态向量
在静态定位时,点位的三维坐标、接收机钟差和模糊度是必须要估计的,因此,定义静态位置状态向量

动态定位时,需要运动物体的数学模型,将接收机的速度假定为一阶马尔可夫过程[12-13],因此,定义动态向量

对于这2种情况,接收机钟差cδtu也假定为一阶马尔可夫过程,可以得出下面的状态方程:

式中,状态转移矩阵为

式中:I为3×3阶单位矩阵,D为n维对角矩阵,对角元素取值为(2n-1)/(2n+1),n=100,Φck+1,k=为采样率。

式中:F为n维对角矩阵,对角元素为:2n/(2n+1),n=100。w为系统噪声,系统噪声协方差矩阵为


式中:Sdt,S˙dt参考Allan协方差参数[14],Qξ为n维对角矩阵,对角元素取值为0.3P,P为用户量程精度,可以从卫星星历中求取。从式(13)和式(16)可见,观测方程可以表示为

误差

其协方差矩阵

式中:P(t|t-1)是滤波过程中η(t|t-1)的方差矩阵,一般情况下v(t)是均值为0,方差为M(t)的白高斯噪声[11]。
2 算例分析
实验采用本文提出的单频精密单点定位模型,GPS定位的所有误差都必须考虑,主要通过2种途径来解决:①对能精确模型化的误差采用模型改正,如地球旋转改正、相对论效应等都可以采用现有的模型精密改正。②对于不能精确模型化的误差以参数形式进行估计,比如电离层延迟改正,目前还难以用模型精确模拟,则以参数对其进行估计。用载波相位变化率和切比雪夫多项式探测与修复周跳,用IGS网站提供的精密星历对卫星轨道和卫星钟差进行拟合求值。
实验用卡尔曼滤波对动态数据进行精密单点定位,采用数据为2008-03-11的观测数据,采样率为1s,观测时卫星数目都在6~8颗,卫星截止高度角为10°,采用事后处理方式,实验点的精确坐标前文已经叙述由差分载波相位模型精确得出。得到的单频精密单点定位结果与实验点的精确坐标进行对比,X,Y,Z坐标差如图1、图2、图3所示,观测值均方根差随历元变化,如图4所示。

图1 单频精密单点定位结果X方向与真值差值图

3 结 论
从上述图中可以看出在Z方向比在水平X,Y方向有较大的偏差,Z方向收敛的时间大于水平方向。对于所有的数据单频GPS精密单点定位能够得到比较高的精度,而且定位结果比较稳定,在X方向的偏差小于50cm,在Y方向的偏差小于70cm,在Z方向的偏差小于1m,均方根在30~38cm之间。
[1]Sugimoto S,Kubo Y.GNSS Regressive Models and Precise Point Positioning,Proc.36th ISCIE International Symposium on Stochastic Systems Theory and its Applications,Oct.pp.159-164,2004[C].Saitama:ISCIE,2004.
[2]Sugimoto S,Kubo Y.Carrier-Phase-Based Precise Point Positioning-a novel approach based on GNSS regression models,Proc.GNSS 2004 Symposium,Dec.P94,2004[C].Sydney:GNSS,2004.
[3]Kubo Y,Kitao S,Fujita S,et al.A New RTK Algorithm for Carrier-Phase-Based Precise Point Positioning Based on GNSS Regression Models,Proc.18th Int.Tech.Meeting of the Satellite Division of The Institute of Navigation,Sep.pp.1492-1499,2005[C].Long Beach,CA:ION GNSS,2005.
[4]Gao Y,Shen X.A New Method for Carrier-Phase-Based Precise Point Positioning[J].Journal of The Institute of Navigation,2002,49(2):109-116.
[5]Beran T,Kim D,Langley R B.High-Precision Single-Frequency GPS Point Positioning,Proc.16thInt.Tech.Meeting of the Satellite Division of The Institute of Navigation,Sep.pp.1192-1200,2003[C].Portland,OR:ION GPS/GNSS,2003.
[6]Salam M A,Gao Y.Ambiguity Resolution in Precise Point Positioning:Preliminary Results,Proc.16th Int.Tech.Meeting of the Satellite Division of The Institute of Navigation,Sep.pp.1222-1228,2003[C].Portland,OR:ION GPS/GNSS,2003.
[7]Le A Q.Achieving Decimetre Accuracy with Single Frequency Standalone GPS Positioning,Proc.17thInt.Tech.Meeting of the Satellite Division of The In-stitute of Navigation,Sep.pp.1881-1892,2004[C].Long Beach,CA:ION GNSS,2004.
[8]Teunissen P J G,Kleusberg A(Eds.).GPS for Geodesy[M].2nd edition,Berlin:Springer-Verlag,1998.
[9]Leick A.GPS Satellite Surveying[M].3rd edition,New York:Johon Wiley &Sons,2003.
[10]Sugimoto S,Kubo Y,Kumagai H.GPS Naviga-tion Algorithms and Estimation-Detection Theory,Systems,Control and Information[J].ISCIE,2002,46(5):276-285.
[11]Gelb A.Applied Optimal Estimation[M].MIT Press,Massachusetts,1974.
[12]Uratani C,Sone K,Muto Y,et al.Dynamical Models for Carrier-Phase Kine-matic GPS Positioning,Proc.16th Int.Tech.Meeting of the Satellite Division of the Institute of Navigation,Sep.pp.809-818,2003[C].Portland,OR:ION GPS/GNSS,2003.
[13]Muto Y,Kubo Y,Uratani C,et al.New Dynamical Models for Kinematic GPS Positioning,Proc.17th Int.Tech.Meeting of the Satellite Division of The Institute of Navigation,Sep.pp.2519-2528,2004[C].Long Beach,CA:ION GNSS,2004.
[14]BROWN R G,HWANG PY C.Introduction to Random Signals and Applied Optimal Estimation[M].2nded.New York:Wiley,1992.
