基于CCD和MATLAB的等照度线绘制方法
2013-12-04朱继红
王 钧 朱继红 冯 醒 肖 军
(1.苏州市城市照明管理处,江苏苏州 215005;2.苏州市城市照明工程公司,江苏苏州 215005)
1 引言
在道路照明中,灯具在路面的光强分布是判断一盏路灯适用程度的重要因素之一,而等照度曲线能很直观形象的展示出路面上的照度分布和照度均匀度情况,这就决定了等照度线在道路照明中有着重要意义。等照度线的绘制有多种方法,常用方法是直接在灯照射的路面上采点,测量对应的照度,然后绘出等照度线;还有一种方法是借助分布光度计,测量出灯具在空间的光强分布,利用照度平方反比定律得出路面上各点的照度,从而绘出等照度线。第一种方法需要到道路上测量,测量点往往比较多,费时费力,而且道路上车来车往,存在一定的危险性;第二种方法相对于第一种方法有了很大改进,但是它需要借助分布光度计才能完成,许多人没有这个条件,并且分布光度计有效的测量一次灯具要耗费30分钟到240分钟;近年来伴随着成像器件的快速发展,为全视野范围内等照度线的绘制提供了强大的工具,CCD相机能够迅速的捕捉图像,并将其转化为数字图像,利用合理的计算定标,就可以通过相机CCD阵列任一像素数值确定其映射的环境中该点的照度值[1]。因此,本文提出这种简单快速的绘制等照度线的方法,只需要在待测灯具照射的路面上拍几张照片,利用MATLAB强大的绘图功能,就可以准确的绘出等照度线。
2 MATLAB简介
MATLAB是Matrix Laboratory(矩阵实验室)的简称,主要应用于工程计算、控制设计、信号处理与通讯、图像处理、信号检测、金融建模设计与分析等领域。它将数值分析、矩阵计算、绘制函数、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,并在很大程度上摆脱了传统非交互式程序设计语言的编辑模式[2];MATLAB软件提供了多类图像处理函数,涵盖了图像处理包括近期研究成果在内的几乎所有的技术方法,采用MATLAB进行图像处理和分析,通过几条简单的命令就可完成一大串高级计算机语言才能完成的任务。本文选取MATLAB作为数据图像处理和绘图的工具,得到了很好的效果。
3 原理
CCD是电荷耦合元件的简称,依靠半导体材料内部的电荷转移,以像素取样的方式将图像信号顺序传送到外部,从而完成光电转换过程[3]。
根据光度学和几何光学可以得到如下公式[4]:

式 (1)中E为成像面上面的照度,L为被测物体的亮度,τ为相机镜头的光透射比,f为透镜焦距,l为透镜与发光面的距离,fm为相机光圈大小;通常lf,所以1-f l≈1,式 (1) 可简化为:

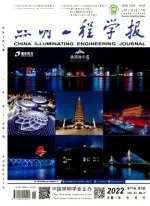
式 (2)中πτ/4f2m是一个常数,其大小与光圈大小有关,在相同的光圈下,成像面上的照度与被测物体的亮度是成线性关系的。一般的建筑路面(如沥青路面),其表面接近于漫反射表面,如果对测量精度要求不是很高,可以把路面近似看作朗伯辐射体,其辐亮度与方向无关,即辐射源各方向的辐亮度不变,示意图如图1所示:
根据漫反射圆盘产生的辐照度公式可得摄入相机镜头的辐照度为[5]:

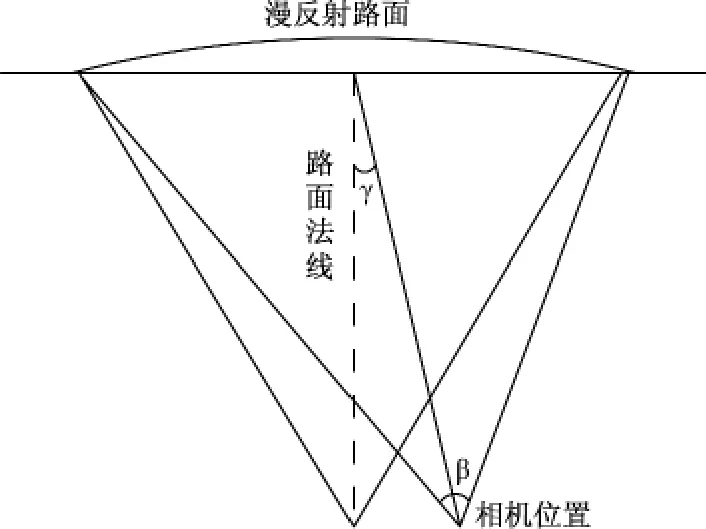
图1 漫反射路面与相机关系图Fig.1 The graph of diffuse road with camera
式 (3)中E1为被拍摄路面的照度,β为被拍摄路面两边缘点到相机所在位置连线的夹角,γ为被拍摄路面中心点到相机所在位置连线与路面法线的夹角,把式 (3)代入式 (2)得:

其中β和γ在现场可以测得,所以在相同的光圈和相同的路面下,被测路面的照度与成像面上的照度是近似成线性关系的,而成像面上的照度大小是通过图像的灰度记录下来的,所以图像的灰度值和路面照度值也存在着近似的线性关系的,本文通过下面实验来验证这一点。
4 研究方法
4.1 数据采集
本文选取了苏州市江星路上额定功率为120W的LED路灯#042和苏州市平海路上额定功率为400W的高压钠灯#040两种光源进行测试,这两条路均为沥青路面。在路灯运行稳定的情况下站在灯杆正下方用相机拍摄灯具照射的路面,尽可能的拍摄全景,这张照片用于绘制等照度线;在路面上选取若干个照度均匀的小区域,测量其照度,同时对小区域拍照,拍照时注意不要遮挡到光线,并且相机尽可能放低,以确保拍摄的小区域内的照度都是大致相同的,这些小区域照片用于分析照度与灰度之间的关系。
4.2 数据处理
在RGB模型中,R=G=B时的彩色表示一种灰度颜色,此时的值叫灰度值,灰度范围为0~255。一般有四种方法对彩色图像进行灰度化:分量法、最大值法、平均值法、加权平均法,其中加权平均法是根据重要性及其他指标,将三个分量以不同的权值进行加权平均,由于人眼对绿色的敏感最高,对蓝色敏感最低,因此,按式Gray=0.299×R+0.587×G+0.114×B对RGB三分量进行加权平均能得到较合理的灰度图像,把采集好的所有小区域照片用MATLAB进行处理,MATALB读入图片后把RGB图片转化为灰度图片,计算出每张照片的灰度平均值,用于和实际照度值进行拟合,具体程序如下:
a=imread('DSC08896.jpg');%读入图片
b=rgb2gray(a);%RGB图像转为灰度图像
e=double(b);%把数据类型转化为双精度
ave=mean(e(:));%求出照片的灰度平均值
4.3 数据分析
最小二乘法是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配,利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小,本文选择利用最小二乘法进行数据分析,能够比较精确的得出照度与灰度之间的关系公式,最小二乘法在MATLAB中非常容易实现曲线的拟合,具体程序如下:
j1=0:0.1:60;%生成间隔相等的点
p=polyfit(x,y,1);%最小二乘法拟合,求出关系公式的系数,x、y分别为放置灰度与照度的矩阵
r1=polyval(p,x);%返回多项式在x处的值
q=corrcoef(y,r1);%求拟合后的判定系数
k1=polyval(p,j1);%求多项式在j1处的值
plot(x,y,'or',j1,k1,'- b');% 绘制拟合函数曲线
legend('原始数据','1阶多项式',2);%图例
xlabel('X');ylabel('Y');%纵横坐标名称
通过以上程序,得到了钠灯与LED灯的照度与灰度的关系图和关系公式:
图2对应的照度与灰度关系公式为:

式 (5)的判定系数R2=0.9964,可见,LED的拟合结果与实际测量结果是比较吻合的。
图3对应的照度与灰度关系公式为:
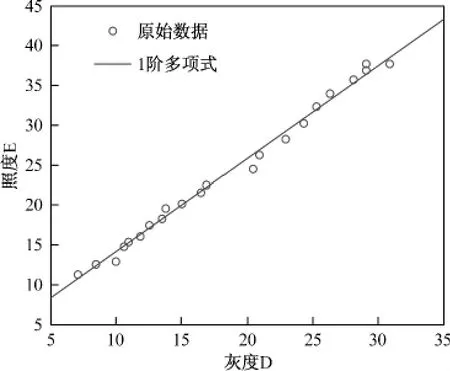
图2 LED灯照度与灰度关系图Fig.2 The illumination with gray graph of LED light

图3 钠灯照度与灰度关系图Fig.3 The illumination with gray graph of sodium lamp

式 (6)的判定系数R2=0.9987,可见,高压钠灯的拟合结果与实际测量结果也是比较吻合的。
从式 (5)和式 (6)可看出,灰度值与其对应的路面照度值的关系是近似线性的,光源种类的不同会导致多项式系数的不同,所以在绘制等照度线时要根据不同的光源使用不同的标定公式。
4.4 等照度线的绘制
在MATLAB中,contour函数是用于绘制矩阵的等高线,本文用它来绘制等照度线,用MATLAB读入之前拍摄用于绘制等照度线的照片,对照片进行一系列的处理,其中利用imresize函数的最近邻点插值法 (NearestNeighbor)调整图像大小,去掉了图片中一些无用的点,提高绘制等照度线的准确度,再根据光源种类选用上面得出的线性公式对灰度值进行标定,利用MATLAB的contour函数就可以绘制出等照度线,具体处理程序如下:
a=imread('DSC08931.jpg');%读入图像
b=rgb2gray(a);%RGB图像转化为灰度图像
c=imresize(b,0.005);%调整图像大小
d=double(c);%数据格式转化为双精度
p=correction(1);%调用校正函数
zd=polyval(p,d);%把灰度值映射到照度值
sy=size(d,1);sx=size(d,2);% 提 取 行列数
mi=min(min(zd));ma=max(max(zd));%求出照度最大值与最小值
mi2=floor(mi);ma2=ceil(ma);%对数值取整
qx=mi2:3:ma2;%取一系列间隔为3的点
figure[lax,lay]=contour(x,y,zd,qx);% 绘制等照度线平面图
clabel(lax,lay);%对等照度线进行标记
colorbar;%生成色卡
通过以上程序得到以下钠灯和LED灯等照度线图:
图4和图5中的每条等照度线相差3勒克斯(lx),图4中线与线之间的距离比较大,而图5中线与线之间的距离比较小,所以在下降相同的照度值的情况下,此款LED灯需要的地面距离大于此款高压钠灯需要的地面距离,这说明江星路上的120W LED灯的照度均匀度比平海路上的400W钠灯的照度均匀度好很多。
图4 LED灯等照度线图Fig.4 The isolux graph of LED lamp
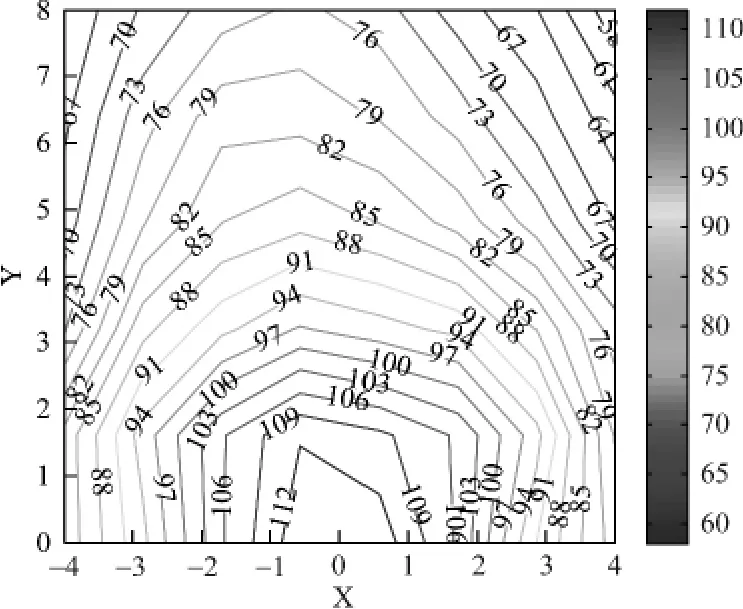
图5 钠灯等照度线图Fig.5 The isolux graph of sodium lamp
5 结论和展望
本文通过数据分析,得出了灰度与照度之间的近似线性关系,根据不同种类光源选择不同的定标公式,实现了等照度线的简洁快速绘制,证实了利用CCD成像绘制等照度线的可行性;现在CCD成像和图像处理技术已经比较成熟,利用CCD成像和图像处理技术进行路灯的监控和参数测试是一个新的领域,目前智慧照明系统在照明行业渐渐兴起,如果能把CCD成像和图像处理技术融合于智慧照明系统中,相信在不久的将来照明管理系统会更加简便和实用。
[1]王书晓.基于数码相机的图像亮度测量技术误差分析[J].照明工程学报,2011,22(2):12~15.
[2]张建武,王文霞.机械振动的MATLAB处理 [J].河西学院学报,2011,27(2):106~108.
[3]徐秀知,冯永茂,邓春健等.基于CCD图像的平板显示器像素的亮度分析 [J].液晶与显示,2006,8:388~392.
[4]魏建中.CCD成像型宽量程亮度计系统研究 [J].光学技术,1999,1:88~91.
[5]王永,徐大雄.漫射红外通信系统设计及其抗干扰技术 [J].北京邮电大学学报,1999,22(2):49~53.