伪噪声码承载卫星导航电文的潜行器——GNSS卫星的运行轨道之二
2013-11-26武汉大学测绘学院刘基余
武汉大学测绘学院 刘基余
20世纪40年代末期,信息论的奠基人香农(C.E.Shannon)首先指出,白噪声形式的信号是一种实现有效通信的最佳信号;但因产生、加工、控制和复制白噪声的困难,香农的设想未能实现。直到20世纪60年代中期,伪随机噪声编码技术的问世,噪声通信才获得了实际的应用,并随即扩展到了雷达和导航等技术领域。在GNSS卫星导航应用中,伪随机噪声码(简称为伪噪声码)是卫星导航电文(即数据码D(t))的承载体,两者通过模二和加法器(以⊕示之)而成为一种扩频码(如图1所示),进而对L波段载波进行数字调相,形成向广大用户发送的导航定位信号。本文主要论述伪噪声码在GNSS卫星导航应用中的相关理论及其实用问题。
一、伪噪声码的运算规则
噪声通信,是采用伪随机噪声码(Pseudo Random Noise Code,简称为伪噪声码,也称之为伪码)。卫星导航所用的伪噪声码,是噪声通信的成功实践。所谓伪噪声码,简而言之,是一个具有一定周期的取值0和1的离散符号串,它具有类似于白噪声的自相关函数。图2表示一种极简单的伪噪声码,它具有两种表述形式:信号波形和信号序列。其中,τ0是以秒为单位的码元宽度;TP是以秒为单位的时间周期,且知TP=LP×τ0,此处LP是长度周期,也即在一个时间周期内的码元数目;本例LP=7,也有用比特作为长度周期的单位(图示为7比特的长度周期)。在二进系中,信号序列称为二进符号序列,记作{x};信号波形叫做二进信号波形,以x(t)表示之。两者的相应关系如表1所示。根据所研究的问题不同,选用不同形式来表述伪噪声码。
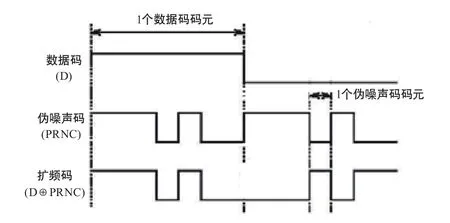
图1 扩频码的形成

图2 伪噪声码的表述形式
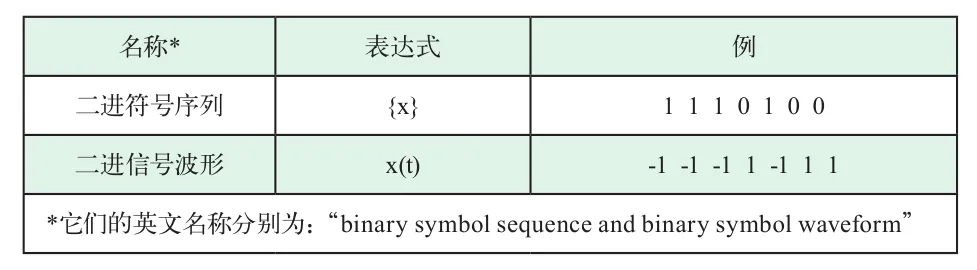
表1 伪噪声码的二进表述法
当对二进符号序列作模二和(不进位加,它以⊕表示)时;遵循下列规则:

当对二进信号波形进行相乘运算时,依据下列规则:

上述两种运算方法是等效的,记作

值得注意的是,上述运算法则只适应于二进符号序列(波形)。
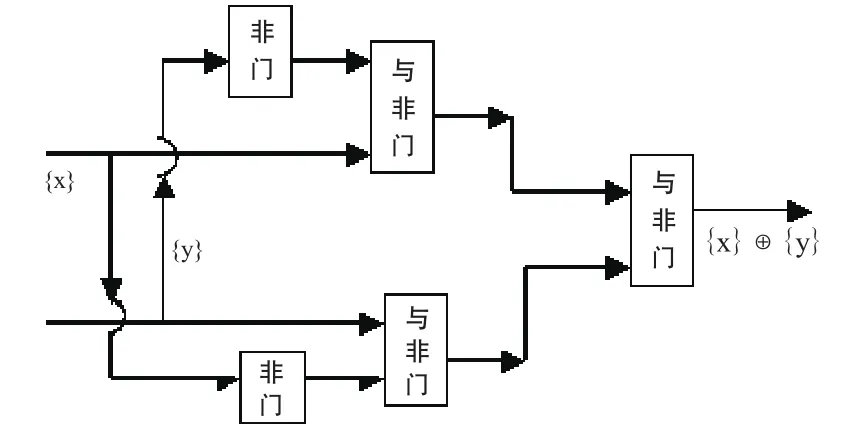
图3 模二加法器框图
此处,{x}和{y}分别表示两个序列,x(t)和y(t)则为两个相应的波形。图3表示模二加法器的基本构成;它的输入和输出高电平均为“0”示之,它的输入和输出低电平均以“1”表示,用高低电平两种工作状态,实现二进数字“0”和“1”的模二和运算。
二、伪噪声码的产生
移位寄存器,是产生伪噪声码的基础电路。移位寄存器不仅具有暂时存放数据和指令的功能,而且具有移位功能。所谓“移位功能”,是寄存器中所存放的数据,可以在移位脉冲的作用下,逐次向左移动或向右移动。
移位寄存器的寄存器单元,一般采用D型触发器(如图4所示),其工作特点是,输出状态等于现时刻的输入状态。图4中的D=1表示输入高电位,D=0表示输入低电位;输入电位为工作状态的建立创造条件,而建立状态的具体时刻则由时钟脉冲CP来决定;即,时钟脉冲CP是用来控制工作状态转移的发生时刻。在时钟脉冲CP的作用下,D型触发器可以将它的输入状态转移到输出状态,而实现数据移位。
如果将若干级(个)D型触发器按一定方式联接起来,便构成一个移位寄存器,图5是一个由4个D型触发器构成的四级移位寄存器。若在其输入端输入某一个数码(电位状态),当时钟脉冲(移位脉冲)串的第一个脉冲(常叫做第一拍)来到时,该数码便从触发器TR1的输入端转移到TR1的输出端(即触发器TR2的输入端);同理,在第二、三、四个时钟脉冲的作用下,这个数码将从触发器TR2的输入端依次转移到触发器TR3的输入端、触发器TR4的输入端和输出端,而将一个四位数码全部移入寄存器。

图4 D触发器

图5 四级移位寄存器框图
伪噪声码的产生,不能用一般的移位寄存器,而必须采用一种具有特殊反馈电路的移位寄存器,叫做最长线性移位寄存器(其反馈电路是线性的),或叫做抽头式反馈移位寄存器(它的英文名称为:”tapped feedback shift register’and/or’maximal-length linear shift register”),它所产生的伪噪声码也叫做m序列。图6表示一个四级最长线性移位寄存器,或称四级m序列发生器。它包括四个D型触发器(D1D2D3D4)、模二和反馈电路和时钟脉冲产生器;图中的置“1”脉冲,将使m序列发生器的各个触发器之初始状态均为“1”,称之为全“1”状态。{xf}表示反馈到触发器D4的序列,该反馈序列是触发器D1D2输出脉冲串的模二和。所需要的m序列{x0}是从触发器D1输出的。

图6 m序列发生器的方框图
m序列{x0}的产生过程如下述。当时钟脉冲的第一拍(脉冲)来到时,Di的“1”状态,将转移到Di-1(此处i=4,3,2,1)。因为D1D2两个触发器均处于“1”状态,它们的输出脉冲之模二和为“0”;它被反馈到触发器D4的输入端(见图6所示);故表1中状态栏内的第二列D4处于“0”状态。当第二拍时钟脉冲来到时,D4的“0”状态被转移到触发器D3,致使后者从“1”状态变成“0”状态;D1D2输出脉冲的模二和仍为“0”,它依旧被反馈到D4的输入端,致使D4D3D2D1的状态分别为0011。在第三拍时钟脉冲的作用下,D3的“0”状态转移到D2触发器,D1D2输出脉冲的模二和还为“0”,致使D4仍处在“0”状态,故知D4D3D2D1分别处在0001状态。在第四拍时钟脉冲的作用下,触发器D4D3D2D1便分别处在1000状态。如此类推,直到第十五拍时钟脉冲来到时,移存器的各级又处在“全1”状态(见表2)。在时钟脉冲的作用下,周而复始地重复着上述状态过程;因此,触发器D1的输出端便输出一个长度周期为15比特的m序列:

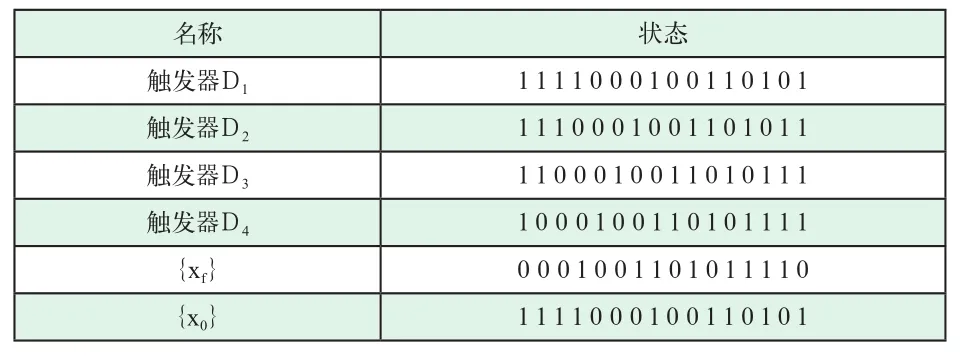
表2 m序列发生器的状态表
上述序列是用触发器D1D2输出脉冲的模二和构成的反馈序列,故图6所示的线性反馈移位寄存器的特征多项式记作

式中,x的肩标(1,2)表示从那一级(D1D2)抽头。

图7 变换输出的序列发生器

表3 几种不同的输出序列
如果图6的反馈电路和m序列输出予以变化,便得如图7所示的序列发生器。在图7的情况下,该发生器的特征多项式为

表3列出了图7所示移存器的各级状态;由该表可见,图6和7两个发生器的反馈序列虽相同,但在图7的发生器中,输出序列是从触发器D1D4引出而经一个与门输出的,故其输出序列为

如果图7所示的发生器不是从D1D4通过与门输出序列,而是从D2D4通过与门输出序列,则有新的输出序列

图7中的反馈序列若不是取自DE1D4,而是用D1D4,此时反馈序列和输出序列分别为

当用D1D4获取反馈序列时,输出序列不是触发器D1D4引出,而是从D2D4引出而经过一个与门输出,则有

如果取消图7中的与门,而从D1触发器直接输出序列,则得到和图6从D1触发器直接输出的相同序列,即一个长度周期为15比特的m序列
图6所示的四级m序列发生器,若仅改变它的反馈联接方式(如图8所示),则可得到不同结构的m序列。比较图6和图8所输出的m序列可见,两个输出序列具有相同的周期,但两者的结构不同。由此可见,m序列的结构仅取决于m序列发生器的反馈联接方式。不同的反馈联接方式,产生不同的m序列。若用移位算符X的j次方表示从m序列发生器第j级的输出,且以Cj=0或Cj=1表示第j级的输出没有连接到或连接到模二加法器,以C0=0,或C0=1表示模二加法器的输出没有连接到或连接到第一级输入端;这样,线性反馈联接方式由下列多项式f(x)表述

公式(4)被称作m序列发生器的特征多项式。图8所示m序列发生器的特征多项式为

依据图6和图8所产生的m序列,可见其具有下列特性:
(1)n级移位寄存器所产生的m序列之码元宽度等于时钟脉冲的周期τ0;m序列的长度周期LP=2n-1(此处n为移位寄存器的级数),时间周期TP=LP×τ0=(2n-1)τ0;图6和图8所产生的m序列之LP=(24-1)=15bits。
(2)在m序列一个周期中,“1”的个数比“0”的个数多1,即“0”元素出现(2n-1-1)次,“1”元素出现2n-1次,而具有平衡性。
(3)对一个周期的m序列,能够得到一个结构不变的另一个等价平移m序列;例如,m序列{x}=111101011001000和该序列的平移序列{xτ0}=011110101100100之模二和,得到下列等价平移m序列{x4τ0}:
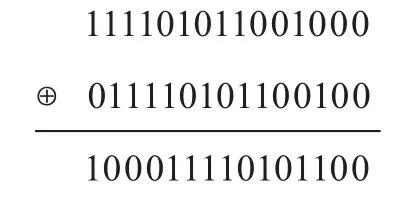
如果平移序列从原来的向前移变成向后移,则有
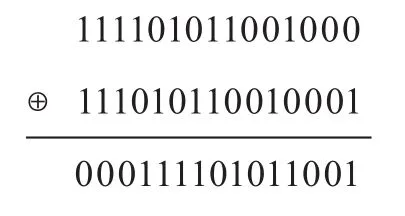
从上述两例可见,不论是向前移的平移序列,还是向后移的平移序列,它们与原序列的模二和,其结果都是一个结构不变的等价平移m序列。
(4)m序列具有良好的相关性。在一般情况下,若有两个相同时间周期T的序列x1(t)和x2(t),则两者之间的互相关系数定义为

式中,τ是x2(t)相对于x1(t)的时间延迟。当x1(t)=x2(t)时,ρ(τ)就是自相关系数;通俗地说,相关系数ρ(τ)表示序列x1(t)和x2(t)之间的“相似”程度。对于时元tK的离散采样的自相关系数为

图8 变换反馈的m序列发生器
上式中的x(tK)x(tK-τ),按前述二进信号波形乘积法则进行运算求得。对于m序列而言,它的自相关系数是
上式中,j等于除j不为0和LP的整倍数以外的任何数。上式的图解如图9所示,从该图可知,当τ从0趋近于码元宽度τ0时,自相关系数ρ(τ)从1趋近于-1/LP;当τ从(LP-1)τ0趋近于时间周期TP时,ρ(τ)则从-1/LP趋近于1;这种变化是具有周期性的。这和随机序列(无周期序列)的自相关系数δ(t)之形状是相似的;仅后者的δ(t)趋近于无穷大,其余各处均为0,且不具备周期性。因此,m序列又被称为“伪随机序列”,它具有双值自相关特性。

图9 m序列的自相关系数
m序列的互相关系数是不同结构m序列之间的相关系数,它是这样计算:先用模二和(或波形积)求出两个m序列{xn}和{yn-τ}的新序列;将后者中“0”的个数(表示{xn}和{yn-τ}相一致的码元数)减去“1”的个数(表示{xn}和{yn-τ}}相异的码元数),除以新序列的码元总数,便得到m序列的互相关系数

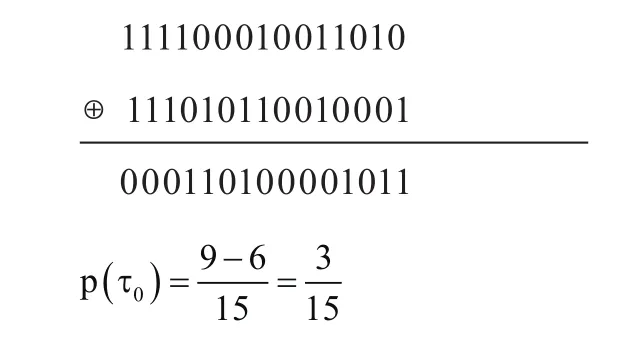
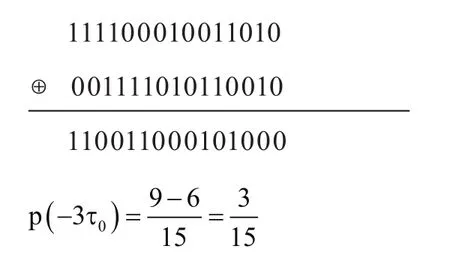
例如,现有两个m序列{x15}=111100010011010和{y15-τ}=111101011001000,求它们的互相关系数
(a)当τ=0时

在新序列中,有11个“0”,有4个“1”,故知

(b)当τ=τ0,即{y15-τ}的首位移到最后一位时,求两者的互相关系数
(c)当τ=-2τ0,即{y15-t}的末两位数次移到首两位时,求两者的互相关系数:
用上述计算方法不难证明,即使两个结构相同的m序列,如果两者之间存在时延τ,它们的互相关系数总是小于1的;只有调整其中一个m序列,致使它们之间时延τ等于零,即两个m序列的码元“对齐”,此时它们的互相关系数方才等于1;这是一个极为重要的实用特性。GPS信号接收机恰好利用互相关系数为最大值的特性,捕获、跟踪和识别来自不同GPS卫星的伪噪声码,解译出它们所传送的导航电文。
(5)根据m序列的自相关系数,可以求得它的功率谱为

式中,τ0为每个码元的持续时间;LP为m序列的长度周期。
从上式可见,m序列和随机序列一样具有(sinx/x)2型的频谱包络;但因m序列是周期性的,其频谱不再是连续的,而是以(2π/LPτ0)为间隔的离散状频谱。
三、几种特殊伪噪声码
正如前文所述,n级线性移位寄存器能够产生长度周期LP=2n-1的m序列。在实际应用中,有时要求所用m序列的长度周期短于LP;有时要求所用m序列的长度周期长于甚至远长于LP。这就是下面要论述的截短伪噪声码和复合伪噪声码。
1.截短伪噪声码
在一个长度周期为LP的m序列中,若截取它的一部分码元组成长度周期为LP'的新序列(LP'<LP),该序列叫做m序列的截短序列,或称截短伪噪声码(简称为截短码)。例如,为了获得一个长度周期LP'=11的新序列,可以从长度周期LP=15的m序列中截除一个子序列而获得该新序列;其具体方法是,在产生15bits m序列的四位线性移位寄存器中,增加一个状态检测器(0011),使其输出脉冲馈送到模二加法器(如图10所示);只有当移位寄存器处于0011状态时,状态检测器的输出才为“1”,移位寄存器处于0011以外的任何状态,检测器的输出均为“0”。这个“0”输出加到模二加法器后,不会导致它的输出变化,只有状态检测器输出为“1”时,才导致模二加法器的输出由“0”变为“1”;即,一个4级m序列发生器,附加上一个0011状态检测器以后,导致该m序列发生器从0011状态跃变到1001状态(如表4所示),这相当于在原输出序列中“截除了”1000子序列,故从触发器D4输出的截短码为

综上所述,截短伪噪声码是在一个m序列中截除一个子序列而形成的,其关键在于选取适宜的检测状态(如上例中的0011状态);在《伪噪声编码通信》一书(钟义信编著,人民邮电出版社出版)中的表4~17列述了几比特至二千余比特的检测状态,可供使用参考。

图10 11bits截短码发生器
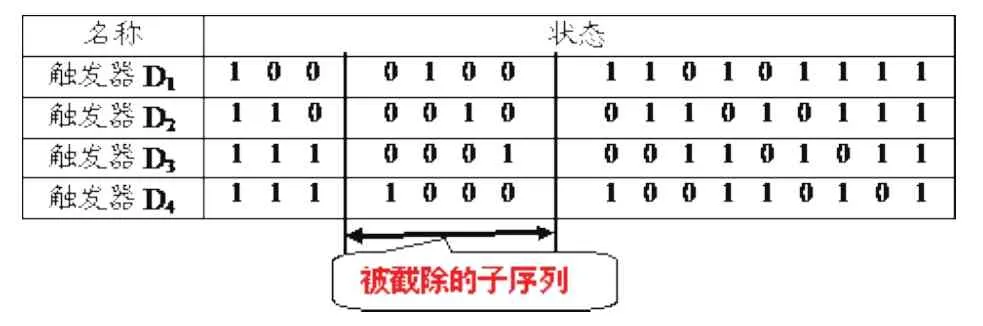
表4 截短序列状态
2.复合伪噪声码
在实际应用中,往往需要长度周期很大的m序列,而采用二个或二个以上的m序列构成复合伪噪声码。例如,一个长度周期为15bits的伪噪声码,若其码元宽度为τ0=1×10-7s,则该伪噪声码的一个时间周期TP相应于长为450m的距离。当用它作距离测量时,只能单值地测得450m以内的距离。为了单值的测得远于甚至远远于450m以上的距离,一般采用增大伪噪声码长度周期的方法;也即用复合伪噪声码作测距信号。复合伪噪声码(简称为复合码),是由二个或二个以上的周期较短的伪噪声码(叫做子码)构成的。若n个子码的周期分别为P1,P2,…Pn,且Pi≠Pj时,由它们构成的复合码之周期为

上式表明,复合码的周期比子码的周期要长得多。例如,由长度周期分别为11bits和15bits的两个子码构成一个复合码,其长度周期为165bits;当其码元宽度τ0仍为1×10-7s时,该复合码的时间周期相应距离长达4950m,它较15bits子码增大了11倍。因此,复合码获得了较广泛的应用。
现以两个子码为例,说明如何获得复合码。为了节省篇幅,此处仅用两个极简单的子码,即,子码{x}=1110100和子码{y}=110,试求由它们构成的复合码{z}。其方法如下述:
(1)按式(11)求出复合码的周期Pz,即

(2)求出复合码的序列{z};其方法是,将子码{x}重复书写3次,而子码{y}重复书写7次,两者依次排列而进行模二和运算,其结果便是所需求的复合码{z}:
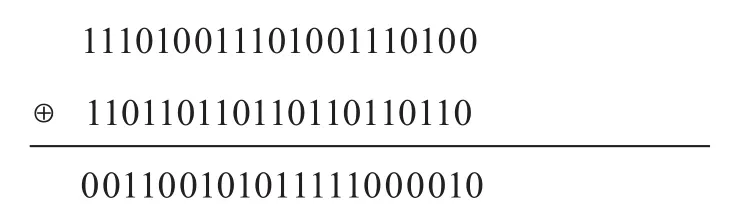
图11和图12分别表示21bits复合码的波形和生成。从图示可见,若用两个子码构成一个复合码时,可将子码{x}重复Pz/PX次,再将子码{y}重复PZ/PY次,然后逐一地求对应码元的模二和,便得到复合码

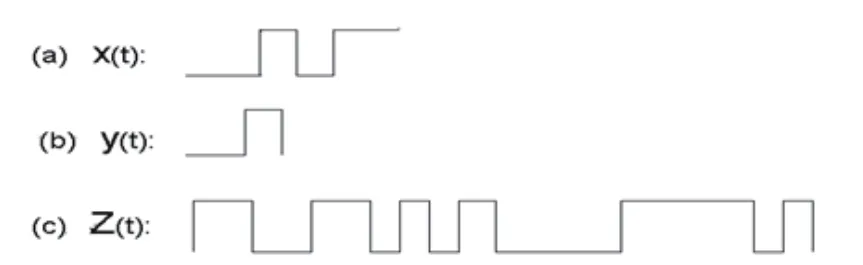
图11 复合码的波形
涉及复合码的另一个实用问题是,从已知的复合码及其中的一个子码,解译出另一子码,称之“解码”;其方法是按下式求得另一个子码:

式中,{z}为已知的复合码;{y}为已知的子码;{x}为待求出的子码。
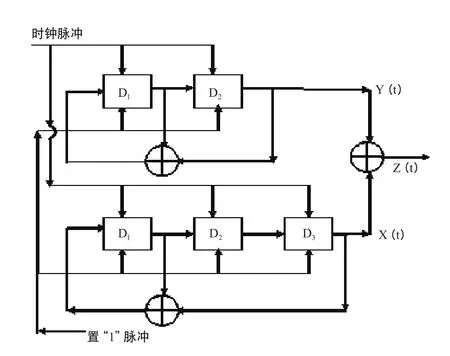
图12 复合码发生器之例
为了验证上式,现以一个最简单的复合码{z}=001100101011111000010及其子码{y}=110为例,解译出构成该复合码的另一个子码{x},其方法如下

从上可见,解码的过程是,将已知子码{y}重复书写Pz/Py次,且与复合码的码元一一对齐,而求出它们的模二和。另一个待求子码{x}的周期为Pz/Py,故知模二和的结果中有Py个待求子码{x};即在上列的模二和结果中具有三个周期的子码{x},且知{x}=1110100,这是图11中的第一个子码。由此可见,即使机密隐藏在某一个子码中,也可通过“解码”求得该子码,进而破译出隐藏的机密。
3.Gold组合码
1967年10月,美国学者R.Gold提出了一种组合码,并被命名为Gold码。它是由两个周期和速率相同而码元结构不同的m序列组合而成的。例如,现有具有相同周期LP=2n-1的两个m序列:{X}和{Y},则由它们构成的Gold序列为

式中,{Yj}为向左移动了j个码元的{Y}序列,而j=0,1,2,… (2n-2)。
从式(14)可见,由两个m序列{X}和{Y}以及左移j个码元的{Yj},可以构成({X}⊕{Y}),({X}⊕{Y1}),({X}⊕{Y2}),…({X}⊕{Y2n-1})共(2n-1)个Gold序列,连同原序列{X}和{Y},总共有(2n+1)个序列,叫做Gold序列族。
从上可见,Gold码具有下列特点:
(1)Gold码的速率和周期与构成它的m序列相同(如式(14)所示)。
(2)Gold码不是m序列,它的互相关值可用Anderson导出的下述公式进行估算
式中,LP为Gold码的长度周期。
(3)Gold码的结构简单,调整方便,具有大量的可用码型,适宜于码分多址的大量用户需求。n级移位寄存器能够产生独立的m序列数目为

式中,ψ(2n-1)为尤拉函数,其数值等于1,2,3,…2n-2数值中与(2n-1)为互素的正整数之个数;例如ψ(6),在1,2,3,4,5诸数中,只有1,5两个数与6为互素。表5列出了2~15级线性移位寄存器产生独立的m序列数目。由表列数据可知,10级线性移位寄存器只能产生60个独立的m序列;然而,两个10级线性移位寄存器却能产生1025个Gold码,可供1025个用户作码分多址应用。因此,GPS卫星采用了Gold码作为易捕码(C/A码)。

表5 n级线性移位寄存器产生的m序列数目

图13 C/A码承载卫星导航电文的形成
四、结束语
伪噪声码,是一个具有一定周期的取值0和1的离散符号串,它具有类似于白噪声的自相关函数。伪噪声码是利用一种抽头式反馈移位寄存器而产生的,这种移位寄存器所产生的伪噪声码也叫做m序列。在后者的基础上,研发成功了Gold码,它被GPS卫星用作易捕码(C/A码);C/A码承载卫星导航电文形成过程如图13所示。由图可知,GPS卫星向广大用户发送的导航信号,是经过了两级“调制”的调相波。这也是现代GNSS卫星借鉴的导航信号形成方法,而被广泛采用。
综观GNSS卫星导航所用,伪噪声码的主要用途可概括为下述三方面:一是伪噪声码在模二和加法器的作用下,与GNSS卫星导航电文形成扩频码,进而发送给广大用户;二是伪噪声码是GNSS用户用来测量站星距离的信号,人们常称之为“测距码”;三是在码分多址(CDMA)信号体制下,伪噪声码是区别不同GNSS卫星的依据,用以实现多颗在视卫星的有效接收和跟踪测量。