虚拟实验在电力系统动态模拟中的应用
2013-11-23李红玲
李 玲,李红玲
(武汉大学 电气工程学院,湖北 武汉 430072)
虚拟实验作为传统实验很好的补充,已经成为加强实践教学、提高教学质量的重要手段[1-2]。将虚拟实验应用于电力系统动态模拟实验教学中,可以不受传统实验的多种条件的制约,从而有效地提高实验教学的能力和效果。
电力系统动态模拟实验是利用物理模拟方法研究电力系统,是电气工程学教学和科研的主要环境和工具之一。通过动态模拟实验,能够加强学生对物理概念的理解和对电力系统实际的认识,还能够验证学生对电力系统原理的新理解和新发现。原动机及其调速系统是电力系统动态模拟实验中的重要内容,但是目前国内少有开展原动机及其调速系统实验的电力动态模拟实验室,有的实验室开展这项实验但效果欠佳。主要原因有两方面:一是实验采用放大器组成的模拟电路,参数调整不灵活,调节精度低,实验效果不理想;二是即使采用了由单片机及其扩展电路组成的数字化控制系统,但存在控制方案调整不灵活、开发周期长和难以进行二次开发的问题。本文提出基于虚拟仪器的原动机及其调速系统实验,即将实际调速系统的数学模型离散化并用于虚拟仪器软件实现,通过虚拟仪器专用的数据采集板卡采集传感器的被控量信息,然后进行控制运算并将控制信号通过数/模转换板卡输出,对被控量进行控制。
1 原动机及其调速系统虚拟实验的设计
1.1 动态模拟要求
原动机动态模拟要求其轴上的转矩变化过程与原型相似,即模型与原型的静态特性和动态特性都要相似。原动机的转矩变化特性完全可以采用直流电动机进行模拟[3]。
原动机的特性对电力系统过渡过程的影响与过渡过程本身所经历的时间长短有关。
在研究电力系统静态稳定问题时,由于所经历的时间很短(百分之几秒),转子的速度来不及变化,故要求模型电机具有足够的机械惯性。机械惯性的补偿是原动机模拟的一个方面。
在研究电力系统动态稳定问题时,由于过渡过程时间较长,转子会在同步转速±1%范围内产生振动。这时要求模型电机能够模拟原动机同步转速的自平衡特性。当原动机的负荷发生较大变化而使调速器开始动作时,原动机的动态特性也需要模拟。
调速系统的特性直接影响到整个电力系统性能:不仅影响电力系统有功功率的平衡,而且影响非同步运行和动态稳定等过程。为了保证实验教学的良好效果,需要充分考虑模拟调速系统模型的灵活性和广泛的调节范围。
1.2 原动机及其调速实验系统的硬件构成
基于虚拟仪器的原动机及其调速系统的构成框图如图1所示,其主要硬件有光电转速传感器(旋转编码器)、霍尔电流传感器、光电隔离保护、数据采集卡、移相触发及放大隔离、可控硅三相全控整流桥、直流电动机等。图1中虚线框内为虚拟仪器部分,主要包括插入式数据采集卡PCL-818LS、驱动程序和动态链接库DLL、计算机以及由LabVIEW编写成的调速系统控制软件[4-7]。其中,直流电动机为他励直流电动机,额定功率17kW,额定电压220V,额定电流90A,额定转速1 500r/min。可控硅为三相全控整流桥;移相触发控制板的输出为六路双窄触发脉冲。
实验系统的工作原理是:传感器测得直流电动机的转速和电枢电流信号,经信号调理电路后,由数据采集卡送入计算,再由LabVIEW进行控制运算并将控制信号输出给移相触发电路。移相触发电路为可控硅三相全控整流桥提供可移相脉冲,最后由可控硅三相全控整流桥完成对直流电动机转速的控制。
1.3 原动机及其调速系统的软件设计
在原动机及其调速系统的数学模型中,原动机部分的流调器和惯性补偿环节,以及整个调速器的模型都需要用LabVIEW软件编程平台的框图程序实现[8-11]。实现的方法是先将原动机及其调速系统的数学模型离散化,得到各个环节的传递函数;再将传递函数分解为比例环节K、延迟环节实际微分环节积分环节这4个基本环节中的一个或几个环节组合;然后在后台利用图形化的编程语言编制对应的框图程序,并利用函数库和开发工具库产生一个由框图程序控制的前面板,即与传统仪器相类似的界面,可接受用户的鼠标和键盘指令。
LabVIEW前面板的设计分为三级,如图2所示:第一级为主界面,包括操作和运行状态监测,第二级为数据采集监控和运行状态显示,第三级为各项控制参数的设置,包括错油门上下限、原动机积分时间常数、汽水惯性时间常数、流调器参数和电流转速反馈系数等。
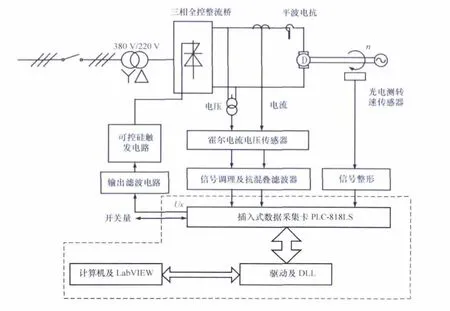
图1 基于虚拟仪器的原动机及其调速系统构成框图

图2 基于虚拟仪器的原动机及其调速系统的人机界面
2 原动机及其调速系统虚拟实验的实践
2.1 原动机空载起动
原动机空载起动时转速与时间的曲线图如图3所示。由于都增加了惯性补偿环节,因此空载起动时水轮机转速没有超调,汽轮机的超调也很小。整个起动过程约需要40~50s,转速最终能维持在额定转速1 500r/min。
2.2 满载甩全部负荷
原动机满载甩全部负荷时的暂态过程如图4所示。水轮机甩全部负荷时,超调量为8.33%,明显的振荡次数小于1,过渡过程时间为15s。汽轮机甩全部负荷时,超调量为5.33%,明显的振荡次数为1,过渡过程时间为20s,与实际电力系统相符合。
2.3 水锤效应
图5所示为水轮机水锤效应实验结果。当机组惯性时间常数较大时,水锤效应的作用不明显,为此在实验时去掉了惯性补偿环节[12-13]。如图5所示,当突然增大水门的开度以增加原动机输出功率时,水轮机的功率在一开始并不会增大,反而会有所减小,电机转速也反而会略有下降,随后机组才会逐渐升速,最终到达较高转速的稳定值。当水门突然关小时,其情况与此相反。可见,实验结果与实际水轮机运行情况相符。
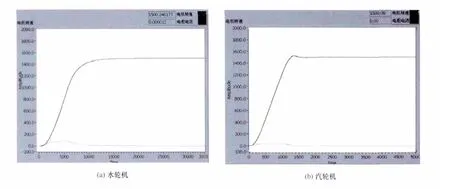
图3 原动机空载起动过程
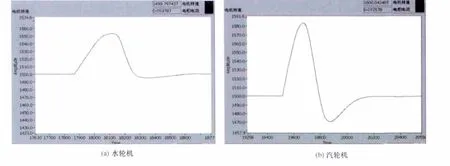
图4 原动机满载甩全部负荷时的暂态过程
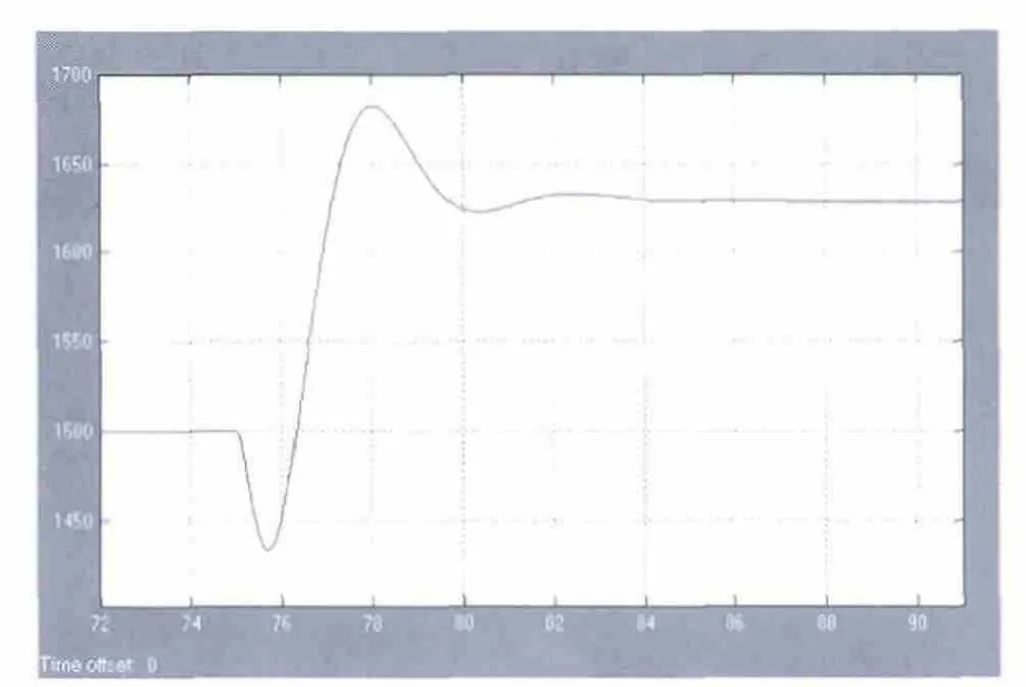
图5 水锤效应
3 结束语
虚拟实验结果表明,本文设计的原动机及其调速虚拟实验可准确地反映实际电力系统的运行特性,与电力系统实际工况相符,完全能够满足实验教学和科研的需要。
本文利用虚拟仪器对典型的动态模拟实验进行设计和实践,探索了在电力系统动态模拟实验中开展虚。拟实验的可行性和实现方法 该虚拟实验不但顺应了调速系统全数字化的趋势,使其可以实现更复杂的数学模型和更高的精度,而且具有原动机运行方式和参数调整更加方便、控制方案调整容易和可扩充性强等优点。
(
)
[1]石中军,王健.基于元认知理论的虚拟实验环境设计策略研究[J].实验技术与管理,2012,29(12):97-99,193.
[2]孙燕莲,文福安.虚拟实验教学的探索与实践[J].现代教育技术,2009,19(4):131-132.
[3]中国电力科学研究院电工研究所.电力系统物理模拟[M].北京:中国电力科学研究院,1973.
[4]江建军,刘继光.LabVIEW程序设计教程[M].北京:电子工业出版社,2008.
[5]李发海,陈汤铭,郑逢时,等.电机学 [M].2版.北京:科学出版社,1991.
[6]杨德先,李国久,陈贤治.同步发电机的原动机仿真研究[J].华中理工大学学报,1998,5(26):44-46.
[7]倪以信,陈寿孙,张宝霖.动态电力系统的理论和分析[M].北京:清华大学出版社,2002.
[8]刘觉民,湛春晖.原动机调速器仿真模型原理与调试[J].实验技术与管理,1995,22(12):61-63.
[9]陈伯时.电力拖动自动控制系统[M].3版.北京:机械工业出版社,2004.
[10]王兆安,黄俊.电力电子技术[M].4版.北京:机械工业出版社,2011.
[11]全晓莉,周南权,李双,等.基于LabVIEW的数字信号处理虚拟实验的构建[J].实验技术与管理,2011,28(10):82-84.
[12]程佩青.数字信号处理教程[M].北京:清华大学出版社,2007.
[13]侴爱辉,冯妍卉,张欣欣,等.虚拟实验在“传热学”实验教学中的应用[J].实验室研究与探索,2011,30(6):312-315.