非人灵长类动物上肢运动信号采集系统的构建与实验研究
2013-11-23张良清李光林
匡 星 杨 琳 张良清 李光林
(中国科学院深圳先进技术研究院 深圳 518055)
1 引 言
应用 Targeted Muscle Reinnervation(TMR)技术[1,2]来实现肌-机接口的主要目的是将残留肌肉中的神经种植到目标肌肉中,将目标肌肉的肌电信号转化为肢体的运动参数,从而建立肌电信号与运动信号之间的解码调和函数,通过解码调和高位截肢者目标肌肉中的肌电信号,为截肢者操控假肢提供有效的运动信号。为了深入研究 TMR 技术实现肌-机接口的可行性,本文选取与人相似的非人灵长类动物为研究对象,其肌电信号可以通过无线肌电采集单元获取。运动信号的采集主要目的是完成运动参数的定量化采集,即根据动物运动的动作类型进行选择,需综合考虑机械工程的技术实现与行为学、认知学的实验需求。
目前,运动信号采集系统有数据手套、机械摇杆装置等[3,4],该类系统很难让非人灵长类动物主动完成指定的动作类型,不易于实现运动参数的定量化采集。非人灵长类动物的运动信号采集需根据动物的行为与认知来引导动物自主学习[5],有效完成规定动作,从而进一步提取运动信号。如何来实现动物主动地、有规律地完成规定的行为任务是动物信号采集系统开发的难点。瑞士弗里堡大学动物行为实验室[6]设计了属于个性定制的实验猴上肢行为训练单元,设定了各种不同的食物诱惑类的行为激励系统,实验动物可以顺利完成相应的动作,但系统较繁琐,且不针对运动信号采集;浙江大学[7]采用箱式结构来固定动物,主要用于脑电信号提取,不适用于肌电信号采集单元的人工操作。
为了方便肌电信号采集单元的操作,并能实时采集动物的运动信号,提高动物跟人的交流互动能力,使得动物能主动完成规定动作,解决结构复杂、操作困难等问题,本文构建了非人灵长类动物(本实验以猴为例)上肢运动信号采集系统,并通过实验验证了该系统的可行性。
2 信号采集实验方案设计
实验猴上肢运动信号的采集需要在实验猴清醒状态下完成,而实验猴自身具有一定的攻击性,必然对信号的采集造成干扰。为了便于采集实验猴上肢的运动参数,本文对运动信号采集实验进行了方案规划,如图 1 所示。
同时,为了诱导实验猴完成实验人员指定的动作,通过一定的奖励机制来协调实现。通过文献[8-10]可知,取食和饮水是实验猴不可或缺的日常生活行为,通过食物和水的刺激有利于实验猴完成规定的动作行为训练。本文根据上述奖励机制设定了如图 2和图 3 所示激励方式。
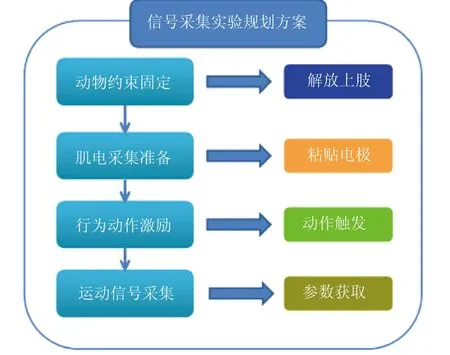
图1 信号采集实验规划方案框图
上述两种激励方式可以实现实验猴的精细动作如肘部的屈伸、腕部的屈伸等。在食物盘中放小块状的食物,实验猴通过连续抓取食物,激励肘部屈伸动作,获取食物奖励;在蓄水器中通过连续按压无线遥控按钮,激励腕部屈伸动作,获得饮水奖励。该采集模式可以根据不同大小的实验猴调节动作活动范围以及动作活动方式,适用于不同体积大小的实验猴。
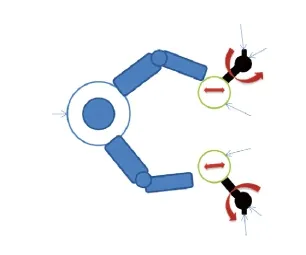
图2 实验猴取食激励示意图
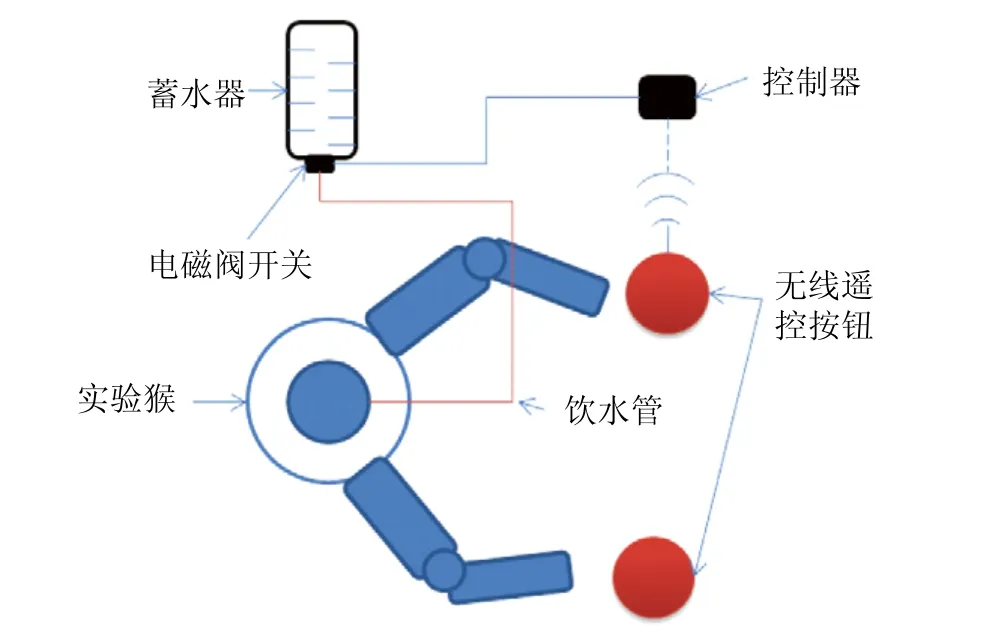
图3 饮水激励
3 信号采集单元的构建
为了顺利完成规定的行为动作、采集到有效的运动信号,必须要约束固定实验猴的部分躯体,解放上肢,在便于对上肢进行肌电信号采集的同时使得上肢能正常完成指定的动作。为此,本文设计了一套可用于实验猴上肢行为训练单元,加工制作了相应的装置,并构建了上肢运动信号采集系统。
3.1 上肢行为训练单元的设计与制作
动物上肢行为训练单元主要包括约束固定系统和行为动作激励系统。约束固定系统用于行为训练中实验猴躯体的固定,解放上肢,既能便于上肢运动和肌电信号采集,又能防止清醒的实验猴对实验人员造成攻击伤害;行为动作激励系统主要用于激励实验猴准确地完成相应规定的动作。
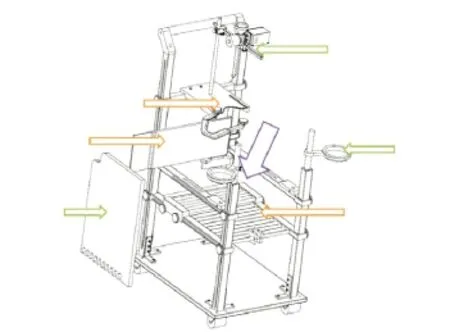
图4 行为训练单元松解状态
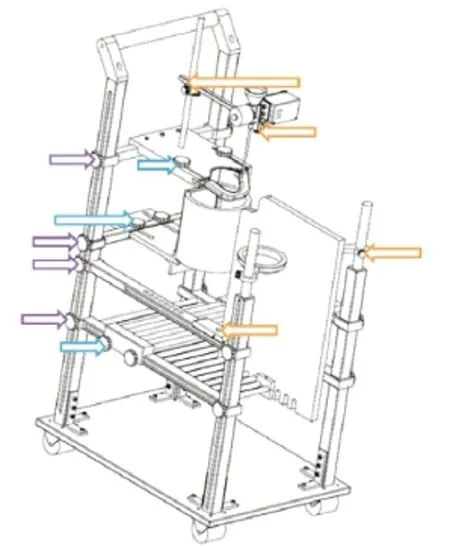
图5 行为训练单元的旋钮布局
由图 4 可知,该单元的约束固定系统由颈部固定台、腰部固定台和动物坐板三部分组成。该约束固定系统的颈部固定台、腰部固定台、座板分上中下三层固定在周边的四根支撑杆上,各层的相对高度可调,如图 4 所示,根据图 5 中 1、2、3、4 所指示的调节旋钮来完成高度的调节。颈部固定由带滑槽的颈托板(如图 6 所示)和与滑槽配合的可调式颈部项圈(如图7 所示)组成,项圈外包软垫,使实验猴颈部感觉舒适,且调节方便,其中颈部项圈还设置了 30°的倾斜角(如图 7a 所示),使实验猴的下颚更适应项圈;腰部固定采用靠背结构并系有腰部固定软带,可以完全解放实验猴上肢,便于无线采集设备在上肢部位的操作;动物座板有两层,分别用于动物臀部坐立和下肢的搁置,提高动物的舒适感。
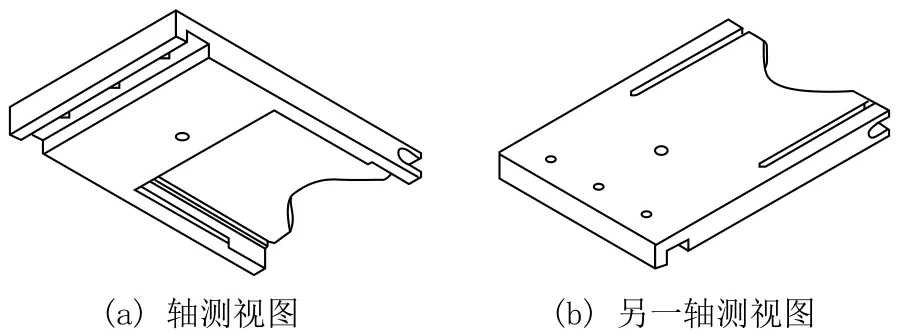
图6 颈托板
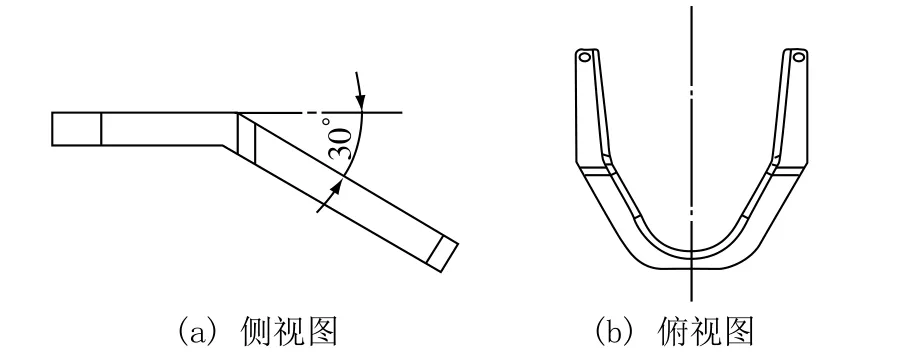
图7 颈部项圈
该单元的行为动作激励系统分别有可控式给水系统和可调隔离式取食台两种。主要用于训练实验猴的自主意识,激发动物行为动作,其中,可调隔离式取食台中间设置了隔离板,主要用于阻断实验猴上肢行为的习惯性干涉,便于实现拟人式上肢动作训练,当实验猴的行为动作较熟练时可以去除隔离板。可调隔离式取食台的设计采用机械式的方法实现,如图 2 所示的取食激励;而可控式给水系统则是采用如图 3 所示的饮水激励方式,进行电路控制设计,设计原理框图如图 8 所示。其中,无线延时闭合开关模块是指信号输入时,开关模块延时闭合设定时间,开始饮水,继而断开,饮水中断,等待下一次开启信号输入,这样可以保证实验猴不停地做相应的动作训练。
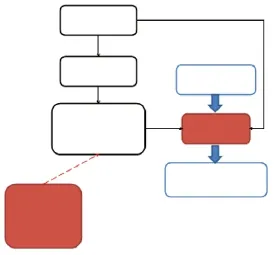
图8 可控式给水系统的原理框图
实验猴上肢行为训练单元的操作运行过程为:
预备工作:实验猴放置于行为训练单元前,可控式给水系统必须调节到远离动物颈部固定台的后端;可调隔离式取食台中间的隔离板需取出,且取食盘应该远离实验猴固定区域;颈部固定台的水平调节图 5 中的旋钮 5 应松开,颈部颈圈(如图 7 所示)从颈托板的滑槽(如图 6a 所示)中滑出;腰部固定软带须展开,调节图 5 中腰托板的旋钮 6 需松开,以便于水平调节腰托板,如图 4 的状态,实验猴从前方进入。
动物固定:实验猴固定区域中,调节颈圈到合适位置,调节图 5 中旋钮 5 锁紧。调节颈托板与动物坐板之间的高度以及腰部固定台与动物坐板之间的高度至合适位置。实验猴腰部用腰部固定软带固定,腰托板靠调节旋钮 6 锁紧固定至合适位置。置入隔离板,用锁紧块固定,将可控式给水系统的饮水管旋钮 8、9 调节至合适位置,供实验猴饮水,如图 5 的状态,实验猴被固定于实验猴固定区域内。
行为训练:实验猴手动控制图 5 中动物遥控按钮开关 11,通过腕部屈伸来实现饮水;同时,实验猴抓取食物盘中的食物,实现肘部屈伸动作。食物盘可根据旋钮 10 来转动或上下滑动食物盘,以达到所需设定的动作效果。同时,隔板两侧的横板一方面可以供实验猴轻松放置手臂,另一方面可供添加其他设置动作的试验台。
动物松开:松开隔离板的锁紧块,取出隔离板,松开腰部固定软带,捉住实验猴的手臂与头顶,松开调节旋钮 5,拖出颈圈,即可松开实验猴。
3.2 上肢行为训练单元的制作
上肢行为训练单元主要材料为铝和不锈钢,铝材相对其他金属材料较轻,便于搬运。
上肢行为训练单元的底板选用实心的铝板,避免了实验猴在动作过程中的倾倒。推扶手与底板脚轮为该单元的移动提供了很大的灵活性。
选用的方形支撑柱为实心,强度可靠,且采用拉丝处理技术,在保证直线度的同时去除了毛刺,质感强。所有的直角处都采用了打磨工艺,避免了对实验人员或实验猴的刮伤,提高了安全系数。
整体单元铝件零件采用氧化技术氧化,提高了铝件的强度与耐腐蚀性。如图 9 所示的上肢行为训练单元的制作实例。
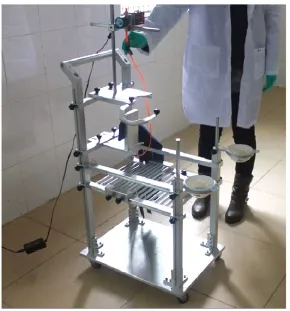
图9 制作实例
3.3 上肢运动信号采集单元的构建
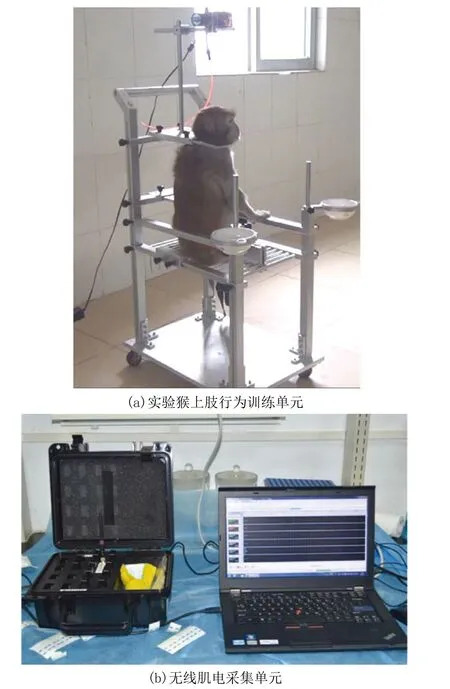
图10 上肢运动信号采集系统
以实验猴为对象的肌-机接口研究中,动物通过完成规定的动作来实时采集运动信号。实验猴完成规定的动作需要借助于上肢行为训练单元,采集实验猴的实时运动信号则需要无线肌电采集单元。由实验猴上肢行为训练单元和无线肌电采集单元共同构建为上肢运动采集系统,如图 10 所示。
将实验猴部分约束在上肢行为训练单元(如图 10a所示)上,解放实验猴的上肢,便于在实验猴上肢进行实验操作;打开无线肌电信号采集单元(如图 10b所示),将无线电极粘贴于实验猴上肢肌肉表面皮肤上,采集实验猴上肢运动信号,通过数据线与电脑的连接,可以实时观察实验猴的运动信号,即完成上肢运动信号采集系统的构建。
4 上肢运动信号采集实验
通过构建上肢运动信号采集系统,为上肢运动信号采集实验做铺垫,实验流程如下:(1)固定实验猴。固定实验猴的颈部,调节颈部项圈至合适位置,将颈托板调节到合适高度使实验猴臀部正好坐在座板上。将猴子的腰部固定,并调节腰托板至舒适位置,简单捆绑住实验猴的腿部,达到更好地解放上肢作用;(2)上肢脱毛处理。将脱毛膏敷在实验猴的上肢上,一段时间后,用沾有酒精的纱布擦净,实现洁净脱毛;(3)开启肌电采集单元。将无线肌电采集单元与电脑相连并开启;(4)粘贴无线电极。将无线表面肌电电极粘贴于猴子上臂肌、前臂肌与胸大肌表面皮肤上,用绑紧带将电极固定;(5)准备动作。采用日常生活动作即取食和饮水来激励实验猴的行为动作,以达到动作训练的目的。图 11为实验过程示例。
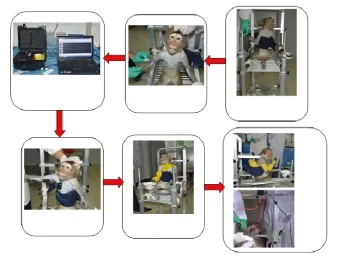
图11 实验过程示例
经过多次实验训练,得到了良好的实验结果,图12 为实验猴正在进行规律取食时采集到的肌电信号。
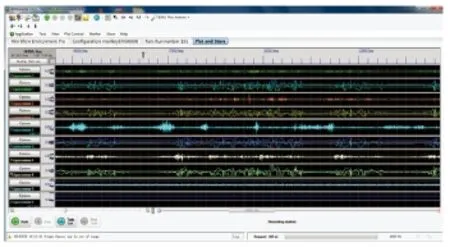
图12 实验猴在规律取食时采集的肌电信号
由图 12 中规律的肌电信号可知,通过本文构建的上肢运动信号采集系统进行运动信号的采集实验是可行有效的。
5 结 论
非人灵长类动物上肢运动信号采集系统中上肢行为训练单元克服了以往结构训练动作单一、约束固定方式笨拙、不便于人工操作等方面的功能局限性,有效地解放了上肢。一方面,便于对实验猴进行实验操作、粘贴电极等,避免了实验猴攻击带来的人身伤害;另一方面,易于实现上肢运动行为训练,也便于实验猴与人进行交流互动。实验证明,本上肢行为训练单元的设计有利于肌电信号采集单元的操作,由两者构建的上肢运动信号采集系统能实现实验猴自主完成日常生活中取食和饮水的行为动作训练,并能通过肌电信号采集单元采集到较理想的实验数据。该系统结构简单、安全性好、操作方便、功能较全、成本较低,适用于各种不同体积大小的非人灵长类动物上肢运动信号采集实验。
[1]Kuiken T A, Li G, Lock B A, et al. Targeted muscle reinnervation for real-time myoelectric control of multifunction artif i cial arms [J]. JAMA: the Journal of the American Medical Association, 2009, 301: 619-628.
[2]Kuiken T, Dumanian G, Lipschutz R, et al. The use of targeted muscle reinnervation for improved myoelectric prosthesis control in a bilateral shoulder disarticulation amputee [J]. Prosthetics and Orthotics International, 2004,28: 245-253.
[3]Schaffelhofer S, Scherberger H. A new method of accurate hand-and arm-tracking for small primates [J]. Journal of Neural Engineering, 2012, 9(2): 026025.
[4]Carmena J M, Lebedev M A, Crist R E, et al. Learning to control a brain–machine interface for reaching and grasping by primates [J]. PLOS Biology, 2003, 1: e42.
[5]Green A M, Kalaska J F. Learning to move machines with the mind [J]. Trends in Neurosciences, 2011, 34(2): 61-75.
[6]Schmidlin E, Kaeser M, Gindrat A D, et al. Behavioral assessment of manual dexterity in non-human primates [J].Journal of Visualized Experiments, 2011, 57: 3258.
[7]张韶岷, 陈卫东, 孙超, 等. 动物脑电-行为同步记录及分析系统 [J]. 浙江大学学报: 工学版, 2009, 43: 2028-2033.
[8]Stark E, Abeles M. Predicting movement from multiunit activity [J].The Journal of Neuroscience, 2007, 27: 8387-8394.
[9]Koralek A C, Jin X, Long II J D, et al. Corticostriatal plasticity is necessary for learning intentional neuroprosthetic skills [J].Nature, 2012, 483: 331-335.
[10]Plautz E J, Milliken G W, Nudo R J. Effects of repetitive motor training on movement representations in adult squirrel monkeys:role of use versus learning [J]. Neurobiology of Learning and Memory, 2000, 74: 27-55.
