基于三维激光扫描仪的滑坡表面变形监测方法——以金坪子滑坡为例
2013-11-21谢谟文王立伟
谢谟文,胡 嫚,王立伟
(北京科技大学土木工程系,北京 100083)
0 引言
滑坡灾害作为主要的自然灾害种类,威胁着山区居民的生命和财产安全。滑坡灾害的预防预警研究工作也一直备受关注。近年来,为了预测滑坡灾害和尽量减小滑坡造成的破坏,科研工作者为揭开大型水库滑坡形成机理及滑动规律做了很多调查研究工作,但各种自然因素和人为因素对库岸稳定性错综复杂的影响,使得水库滑坡的预警工作还是以监测为主要手段,特别是处于变形速率发展较快的滑坡,其变形监测极其重要。
变形监测技术可以分为两类[1]:(1)“点”式监测(GPS,伸长仪,全站仪,激光、雷达测距仪);(2)“面”式监测(摄影测量,卫星和地面雷达干涉测量,机载激光扫描测量和地面激光扫描测量)。总的说来,点式监测技术能够获得较高精度的测量数据,但由于只能获取少量已知确定点的信息而非整个滑坡形态故有较多局限性。此外,地面型三维激光扫描仪数据的采集不需要布设监测点,较之传统的监测手段更能快速、准确地反映滑坡的表面形态,进而获取地表变形值。对于处于加速变形至剧变破坏阶段的滑坡,这种实时、“面”式、高精度的监测对于滑坡灾害的预测预报显得尤为重要,其不受干扰、全天候地的特点,可及时准确提供连续可靠的数据,进而为滑坡灾害的预报发挥关键作用[2]。相比于传统的测量技术,三维激光扫描仪在地形采集方面更加方便、有效。
作为一种新兴的监测技术,三维激光扫描仪被应用在了岩石边坡特征分析、岩体崩塌监测的一些实例当中。岩体边坡表面的变形监测结果可以不同时间采集的激光点云数据集的比较分析得出。2004年Collins B.D等在美国加利福尼亚州海岸线侵蚀状况监测中首次较成功地将激光扫描监测技术引入到岩土工程监测[3];2004年日本新泻县中越地震诱发了当地接近400个较大型滑坡,三维激光扫描技术被应用在震后灾害的评价工作中,大大提高了灾害评估的效率[4];2006年A.Abell'an等人在之前研究工作的基础上将三维激光扫描监测运用在西班牙某危岩体的监测中,监测结果显示出了这种监测技术可以监测到较高精度的岩体变形及变形速率,验证了激光扫描监测技术应用在岩体监测研究中的可行性[5]。近年来,各国学者在三维激光扫描监测技术监测方法改进、监测精度的提高、监测领域的扩张和监测自动化集成等方面不断完善、改进(如Chigiraet al.,2004;Corsini et al.,2006;Lollino et al.,2007a,b)[6-8]。这些研究表明了三维激光扫描仪在岩体边坡变形监测的可行性和方便性,且在变形监测、变形体积量化过程中可以达到厘米级的精度。2011年,A.Abell'an等人将地面型三维激光扫描仪应用于西班牙某岩体崩塌的监测中,得到了毫米级程度的可靠形变值[9]。以上的研究无疑证明了三维激光扫描监测技术在岩土工程监测中应用的可行性,在某些环境条件下实现高精度监测的可能性。但是目前大部分的三维激光扫描监测案例都是主要针对危岩体、岩质边坡、岩体海岸线等,即完全不包括植被或植被很少的情况;大多数监测环境较为理想。
2005年以来,国内少量学者开始对三维激光扫描仪在边坡监测中的应用展开研究[10],徐进军等人对激光扫描监测技术进行了相应的理论分析与实际测量,获得了初步满意的结果。但国内对于三维激光扫描的监测技术研究的成果少见,且没有形成相对成熟的数据处理分析体系,此技术在大型滑坡监测工作中的应用并未得到扩展。本文以金坪子滑坡为例,介绍了三维激光扫描仪应用在大型滑坡监测中产生海量数据处理的方法,以及探讨了从无植被岩体的变形监测到有较少植被的滑坡体的变形监测的可能性,尝试了一种新的滤波方法。滑坡前缘的分析与传统监测数据有较好的吻合。点云数据的后处理借助了GIS平台,为监测结果的分析提供了多样性与可视性。
1 金坪子滑坡
金坪子滑坡位于金沙江乌东德梯级河段下游右岸,位于云南省禄劝县和四川省会东县交界的金沙江干流上(图1)。金坪子滑坡上距乌东德水电站坝址约900 m,遥感解译体积约为6.2×108m3,其稳定现状、变形趋势及可能失稳方式及规模关系到乌东德水电站梯级开发的成立及河段内坝址的选择,倍受各界关注[11-12]。
通过综合查勘、地质调查与测绘根据地质测绘、钻探与硐探、物探测试与岩土试验、变形监测等综合技术手段进行的研究,金坪子滑坡大致可分为五个区域(图2)。其中,以Ⅱ区变形尤为显著,Ⅱ区上距乌东德坝址约2.5km,主要为崩、残坡积体,目前仍处于变形过程中。从2004年10月起,金坪子滑坡监测工作开始启动,在地表变形监测中,包括水平位移监测和垂直位移监测,变形剧烈的Ⅱ区设有17个监测点。
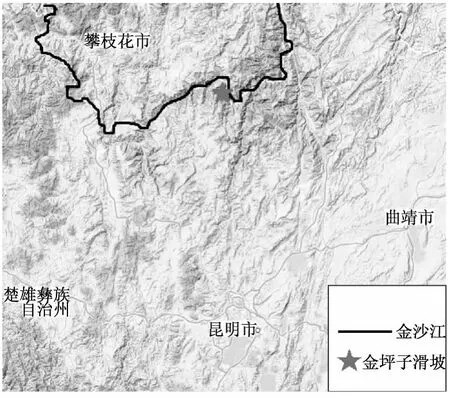
图1 金坪子滑坡地理位置示意图Fig.1 Location of Jinpingzi landslide
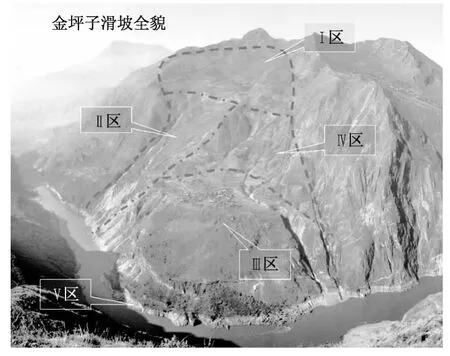
图2 金坪子滑坡分区Fig.2 Bird view and subareas of Jinpingzi landslide
三维激光扫描监测技术在2009年开始应用到金坪子滑坡的监测中。本研究采用地面型三维激光扫描仪为奥地利Riegl公司生产的VZ400系列(配置数码相机Nikon D700),分别于2009年5月30日和2010年5月14日、2011年7月1日采集金坪子滑坡地表三维点云数据。
2 三维激光扫描仪监测原理与方法
2.1 三维激光扫描仪数据采集原理
三维激光扫描仪主要包括激光测距系统、扫描系统和支架系统,同时集成数字摄影和仪器内部校正等系统。根据 TOF(Time of Flight)脉冲测距原理[13-14],其获取扫描目标点云数据坐标原理为:扫描仪内激光发射装置每秒发射数以百万计的激光束,这些激光脉冲作用到目标体表面上,经反射后由仪器内脉冲接收装置接收处理,获得相应信息。三维激光扫描系统通过激光脉冲反射时间、传播速度获得距离值S,同时记录激光脉冲横向扫描角度值α和纵向扫描角度值θ,从而得出各激光脉冲接触点的坐标,这是一个仪器内部系统的极坐标表示方法,通过坐标转换,得到直角坐标方式表示的数据。距离S可根据以下公式计算:

其中:
t——时间;
Cg——激光束在介质中的传播速度;
Co——激光束在真空中传播速度;
ng——介质的激光特性参数。
X轴在横向扫描面内,Y轴在横向扫描面内与X轴垂直,Z轴与横向扫描面垂直,可得三维激光脉冲点P坐标的计算公式为(图3):
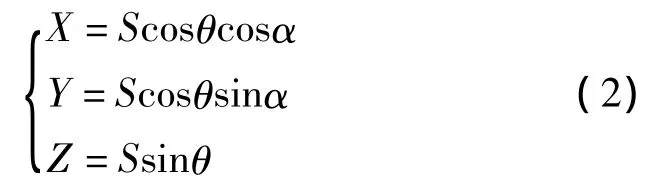
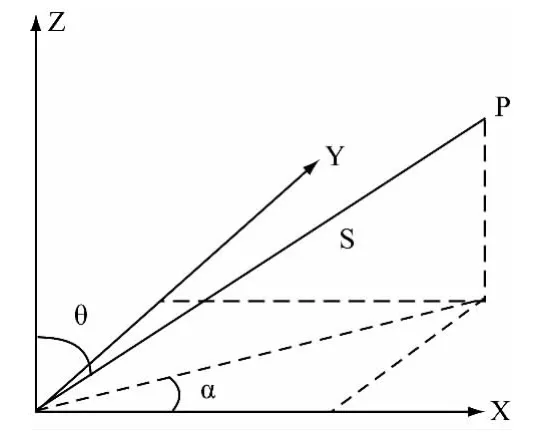
图3 极坐标与直角坐标转换原理Fig.3 Transformation from scanner own coordinates(polar coordinate system)to project coordinates(cartesian coordinate system)
为了尽量获得物体完整的点云数据,需要对物体进行多视点扫描。其中,两个影响三维点云空间精度最大的因素是:激光束发射密度;扫描仪与被观测物体间距。通常,我们在观测距离一定的情况下,通过提高激光速发射的密度以获得高精度的三维地形点云数据。但是,这样的技术最严重的一个缺陷是由于物体遮挡激光束无法到达观测目标而造成的无数据区域。为了克服这个缺点,需要增加不同的扫描站点对同一目标进行几次扫描。同时,每个扫描站点每次扫描中会设置几个关键点,为了使每个扫描站点扫描的激光点云数据方便拼接起来。通过这样的方法可以得到高密度的点云数据,但是因为这些数据包含很多错点、杂点、虚点,往往不能直接使用,必须经过滤波和删减。同时,海量的点云数据(可能10GB)对数据处理和数据分析而言是一个大挑战。因此,采用合适、有效的滤波方法也相当重要。
2.2 三维激光扫描仪RIEGL VZ-400的特征
Riegl VZ400型三维激光扫描仪系统由三维激光扫描仪、旋转平台、附件构成。该三维激光扫描仪可进行水平360°,垂直100°的快速扫描(300,000 点/s),分辨率可达mm级.系统能够在几分钟内对研究区域,楼房,桥梁,室内等获取三维点云及影像数据(表1)。
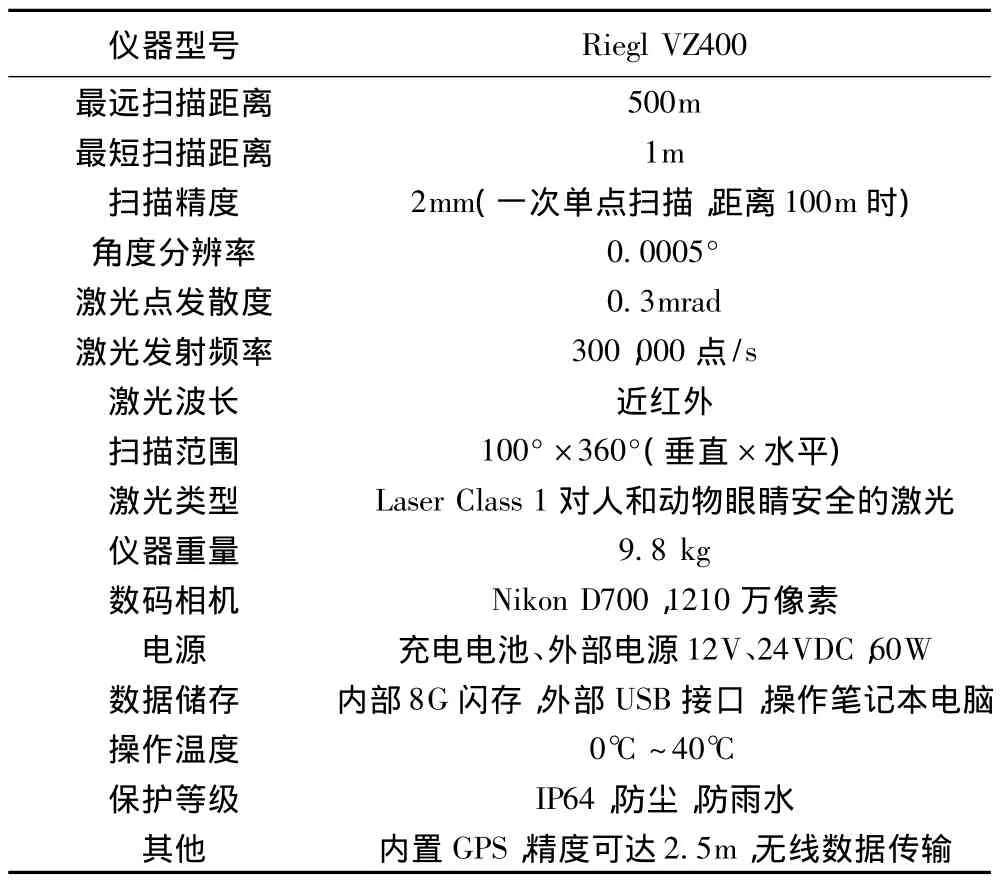
表1 Riegl VZ400参数表(来自Riegl公司)Table 1 Parameters of riegl VZ400(From Riegl)
本文实例中,三维激光扫描仪RIEGL VZ-400被应用在点云数据的采集。观测目标的基本形状特征通过激光扫描仪发射激光束而得到,激光光束发散角达到0.0005弧度,扫描仪扫描范围为0°~100°(垂直方向),0°~360°(水平方向),激光束发射频率为每秒约30万点。VZ-400最大扫描距离为500m。100m单个点的精度是2mm。RiSCAN PRO的软件安装并应用到传感器的配置,数据采集,原始数据的预处理和存储。
2.3 三维激光扫描仪数据采集过程
利用地面型三维激光扫描仪对地形数据进行采集时,数据采集流程(图4)如下:
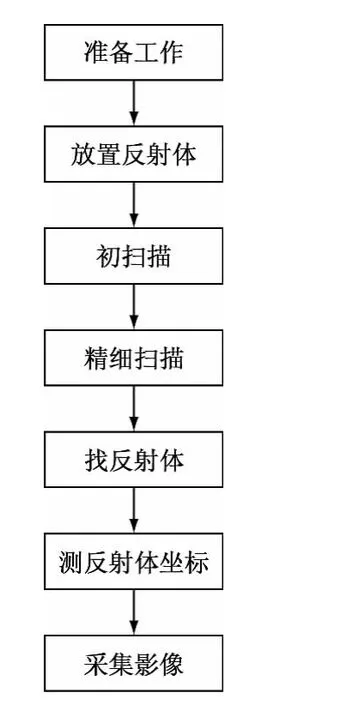
图4 点云数据采集流程Fig.4 Process of 3D points data acquisition
(1)准备工作 包括扫描站点选择,三角支架支放,扫描仪安置,数码相机、电源、笔记本电脑、数据线等的连接。扫描站点的选择原则有两个:第一,要保证从选取的扫描点能获得完整的数据;第二,尽量用比较少的扫描点获取数据,以减少配准的工作量。
(2)放置反射体 在扫描仪20m左右的范围内置放10cm直径的反射体,反射体由高级反光材料制成。反射体置放时,尽量沿四周分布,高低错置,正对扫描方向,避免扫描方向与反射片正面方向间夹角过大。
(3)粗扫描 通常扫描前会进行一次360°的粗扫描,设置扫描参数,保证有反射体可见的精度。
(4)对重点目标的精细扫描 精细扫描的目的是为了获取目标更为精确的几何坐标,扫描精度根据需要和距离而定。
(5)找出反射体的位置 反射体的坐标信息是关键,应计算其精确的三维坐标。
2.4 数据处理方法
现场采集获得的点云数据经过初处理,包括点云坐标配准、点云的裁剪拼接、滤波和点云赋色等,使之成为有组织的点云数据,去除或降低了噪点、孤点、异常点和降低植被对地形测量的影响。由于滑坡范围大,点云数据海量,在数据处理过程中我们将滑坡二区分为14个子区进行处理,以解决数据量过大不能计算的问题。点云滤波是数据初处理中的重要部分,对监测结果有直接的影响,研究在三维点云滤波中采用了2.5D滤波方法:用规则排列的网格(XY平面内)划分某范围内的三维点云,每一个网格单元内拥有若干三维点,用网格中Z坐标值最低的一个点代表这一网格中的所有点。本文研究中,采用的滤波网格大小为0.4m×0.4m。经过初处理的点云数据,在GIS平台进行进一步的后处理。利用GIS平台的空间分析与数据管理优势,点云数据可得到更丰富的分析,监测结果可更直观、明了的体现出来。数据后处理的内容包括:ASCII数据矢量化、插值生成DEM、DEM比较法、变形趋势分析、土方差量分析、断面分析等(图5)。
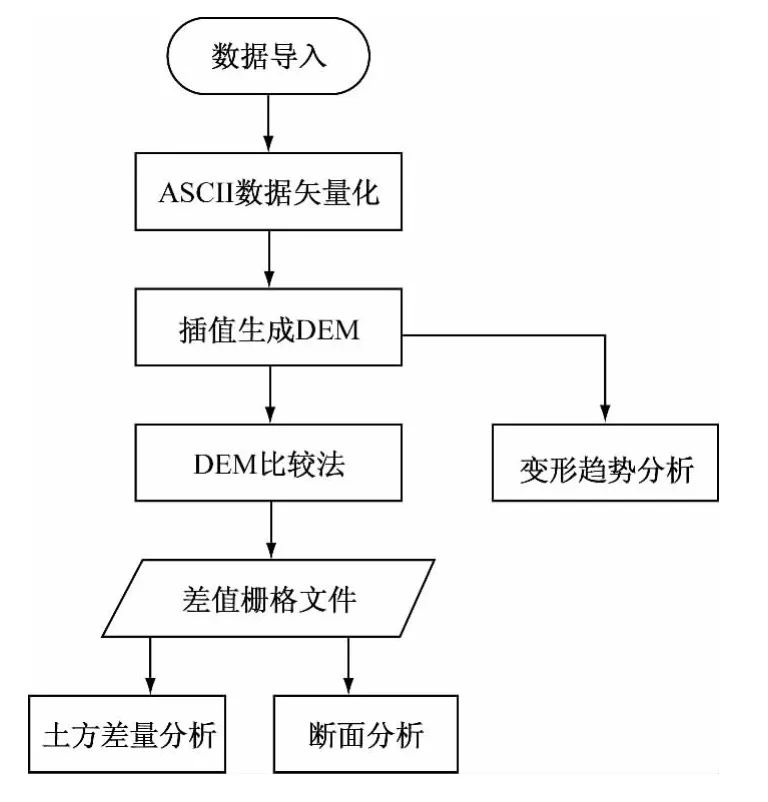
图5 GIS平台数据后处理流程Fig.5 Process of data post-processing on GIS platform
在GIS平台上,点云数据矢量化后以Polypoint Shapefile的格式参与GIS平台上进行的计算分析(图6)。矢量化后的海量数据点,除了包含三维坐标X、Y、Z之外,还可能含有反射强度信息、激光束振幅信息等,视后期数据分析需要而进行选择。
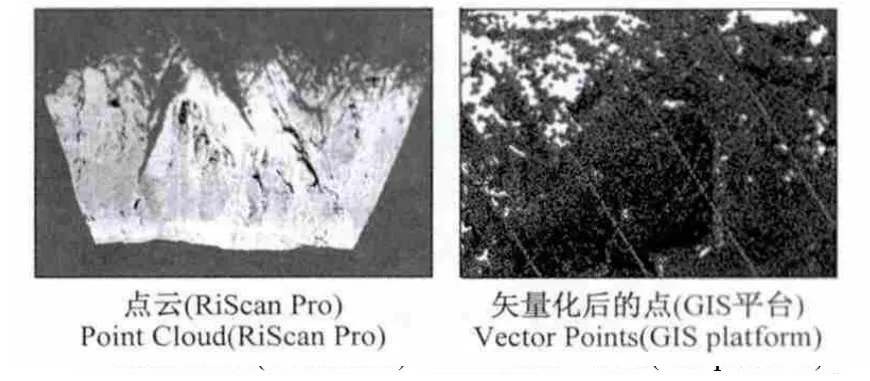
图6 点云与矢量化后的点Fig.6 Point cloud and vector points
通常,可以通过多种方法对点云数据进行滑坡变形分析,如数字高程模型的比较,固定点的比较和断面比较。滑坡位移的量化与滑坡引起的体积量的改变,可通过DEM的比较实现。对于大型山体滑坡,我们采用了以1m作为栅格大小的生成每期地形的DEM。由于遮挡,DEM的不能直接比较,被遮挡的区域不参加计算。
3 结果与分析
3.1 DEM比较
在经过滤波处理后,结合数据采集时的参数选择、数据量较大的考虑,将Ⅱ区分“切分”成了若干矩形小区域(图7)。采用滤波精度为0.4m,DEM栅格精度为1m。
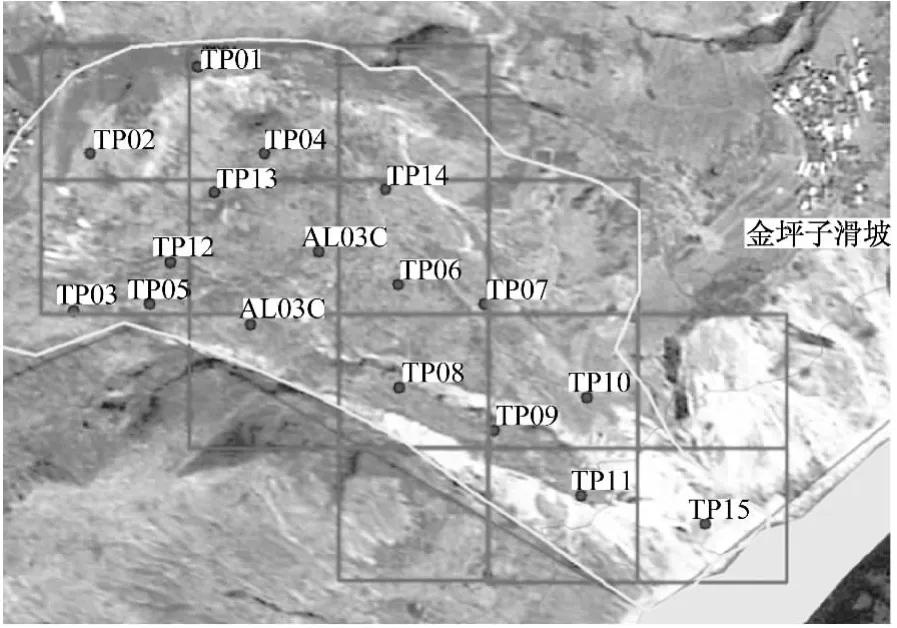
图7 Ⅱ区数据分区Fig.7 Data subareas ofⅡarea
以2010~2011年监测数据的DEM比较结果为例,经上述分析流程与方法,得到了2010年5月30日到2011年7月1日间金坪子滑坡地表变形的分布图(图8)。其中,浅色区域代表Z值升高;深色代表Z值降低。从图8中可以看出,大概分别情况为:Ⅱ区前缘、后缘陡坎下部呈Z值上升趋势;物质堆积较多较厚的中部呈Z值下降趋势。
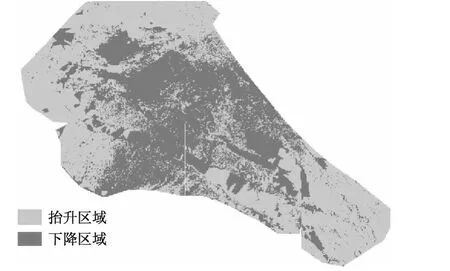
图8 Ⅱ区2010-2011垂直向抬升、下降分布图Fig.8 Deformation distribution of 2010-2011
由于深沟、距离远等因素造成某些区域原数据缺失,数据缺失严重的地方可能引起该处计算处理结果不可信,故将数据有可能不可信的区域去除,余下结果数据有很高的可靠性。去除不可信区域后,根据栅格计算结果,按垂直向Z值分级,共分7级(图9)。分级节点:-3m,-1m,-0.5m,0.5m,1m,3m。呈 Z值下降趋势的区域,在图9中用点、竖线图例表示;变化在-0.5m~0.5m的区域没有颜色显示;呈Z值上升趋势的区域,在图9中用圆、网格、斜线图例表示。
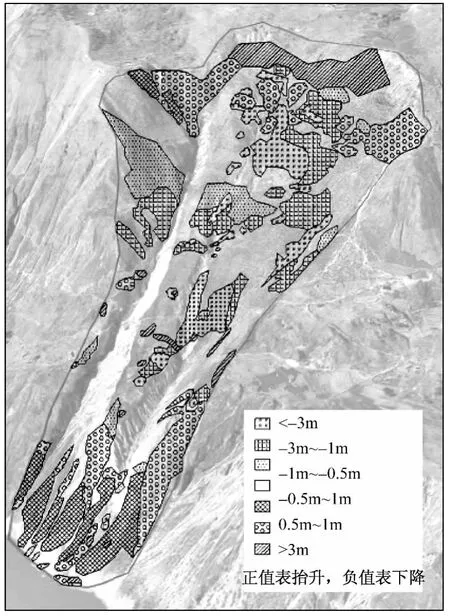
图9 2009~2010年Ⅱ区DEM比较法处理分级结果Fig.9 Results of DEMs subtractions in 3D image system
去除不可信区域后,根据栅格计算结果,推算出从2010年5月到2011年7月,金坪子滑坡Ⅱ区的侵蚀或下降区域的方量约为66,188m3,抬升、堆积的土石方量约为 52,877 m3,二者差值 13,311m3。
3.2 固定点比较
本文实例中,我们选择了传统监测点TP8作为固定点比较方法的验证。以2009~2010年数据为例,在消除植被点以后,对以TP8为原心不同半径区域内点进行了统计以观测点TP8坐标(X、Y)为圆心,分别选取3m、2m、1m为半径区域内的点,对区域内点统计分析,得点的Z值平均值;比较前后两次扫描结果处理得到的Z值平均值,即认为是近一年来该观测墩的垂直位移(表2)。考虑坡面坡度等因素,推测观察墩的水平位移,与Ⅱ区观测墩全站仪监测结果对比(图10)。

表2 观测墩点(TP点)激光扫描Z值结果(m)Table 2 TP08 Z value by 3D laser scanning
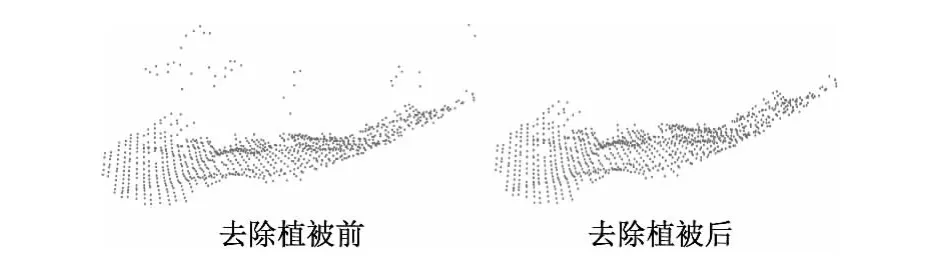
图10 对固定点消除植被的影响Fig.10 Manual filtering in certain fixed monitoring point
采用R=1m的处理结果,得到2009年到2010年TP08的Z值降低了0.549m,根据近年来地面全站仪TP08监测数据0.450相比较,相差0.099m。
3.3 断面分析
滑坡前缘的变形时整个滑坡区域变形最大的部分,本文运用断面比较的方法主要分析了滑坡Ⅱ区前缘的三个断面,采用基于DEM的分析方法,通过载入断面线的矢量文件和扫描前后两次的DEM,比较前后两次做出的断面线。通过两次断面线的比较,可以看出滑坡前缘的变形趋势。
经过处理分析及计算,如图11可以看出,Sec1中,断面前部为河沙堆积处,出现Z值上升趋势,整个断面看上去像是在沿着滑动方向往前推进,并且略像上抬升。Sec1断面的变化位移较大,最大的地方达到了7~10m,可能由于该位置上没有坚硬、完整的岩石,多为破碎、易流走的石砂,容易被搬运而造成较大的变形反应在断面图上。
3.4 滑坡前缘断面特征分析
图12表示了滑坡前缘的仔细比较方法,本文以2010~2011年为例分析了金坪子滑坡前缘的5个断面,通过比较同一断面位置两年间的剖面线,相同特征点的移动可以计算出来。结果显示金坪子滑坡前缘在2010~2011年间在水平方向上向前推动了0.323m。与传统全站仪的监测结果每年滑坡前缘以约0.3m速度向前推动的数据比较,数据基本吻合。
4 结论
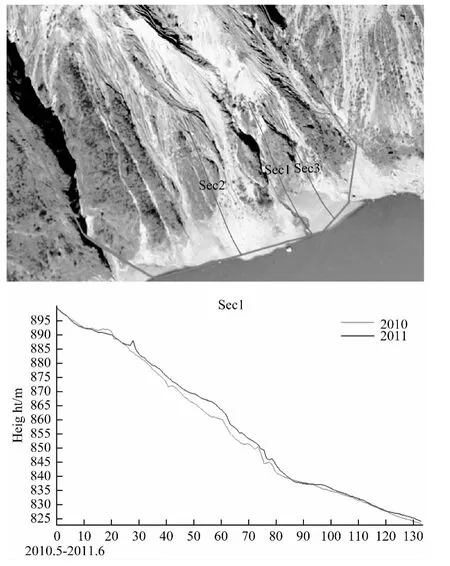
图11 断面位置示意图与断面图(Sec1)Fig.11 The section of the front of Jinpingzi landslide(Sec1)
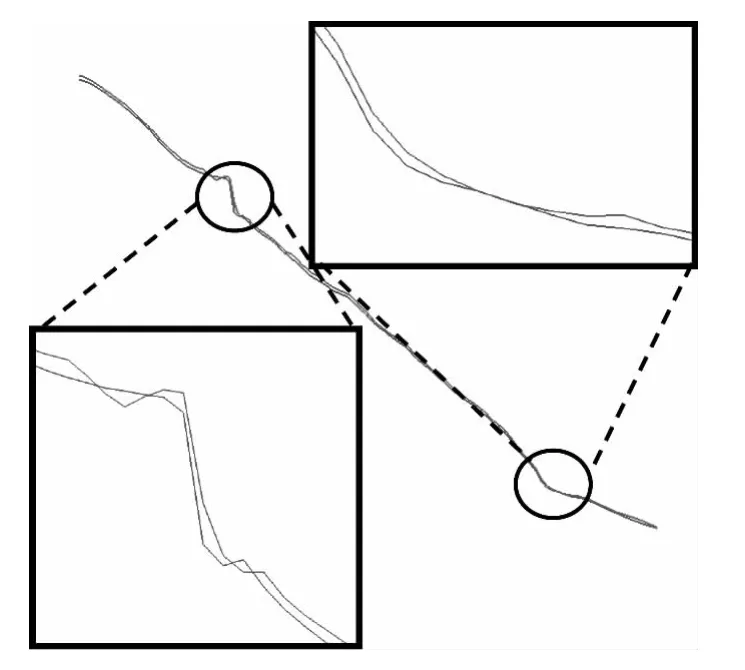
图12 滑坡前缘断面特征比较与分析Fig.12 Comparison of section in the toe of Jinpingzi landslide
本文中通过对金坪子滑坡Ⅱ区时间跨度三年的激光扫描监测,结合初处理和GIS平台的数据后处理,形成了一套数据处理流程,将数据分析引入到GIS平台,得到了很好效果。通过分析比较监测结果,我们看到三维激光监测技术可以基本表征滑坡表面的变形情况,提供定量分析,适用于调查大中型滑坡较大变形发展趋势;对于大中型滑坡,该方法可以实现高效、大面积监测。一到两天、一到两人的现场工作量,大大节省了人力和物力;由于滑坡面积较广,采集过程难以严格的控制、环境扰动大、植被遮挡和滤波等原因,以及在数据坐标转换过程中产生误差等,对于大型滑坡和有一些植被覆盖的滑坡体,监测结果无法达到毫米级(仪器本身的精度),初步分析精度可以达到厘米级别;在危岩体、岩质边坡和无植被滑坡体变形监测中效果较好的三维激光扫描监测技术,在有植被覆盖的滑坡体监测中有一些精度局限性。文中采用了2.5D的滤波方法,在无高精度监测结果的要求下,是一种简单、高效的滤波方法,适用于大型、有稀疏植被覆盖的滑坡监测分析。
地面三维激光扫描技术应用到滑坡灾害监测领域中,无疑有着广阔的潜力。但具体应用到滑坡的变形监测与预测预报时尚存在许多实际问题有待解决,需要继续研究。本文仅仅提供一种尝试和参考。随着三维激光仪的改进、监测方法的完善,新滤波方法的出现等,激光扫描技术将会越来越多的应用到岩土工程监测中,成为一种常规监测手段。
[1]Johan Kasperski,Christophe Delacourt,Pascal Allemand etc.Application of a Terrestrial Laser Scanner(TLS)to the Study of the Séchilienne Landslide(Isère,France).Remote Sens[J].2010(2):2785-2802.
[2]董秀军,黄润秋.三维激光扫描技术在高陡边坡地质调查中的应用[J].岩石力学与工程学报,2006,(S2).DONG Xiujun,HUANG Runqiu.Application of 3D laser scanning technology togedogic survey of high and steep slope[J].Chinese Journal of Rock Mechanics and Engineering,2006(S2).
[3]Collins B.D.Sitar N.Application of high resolution 3D laser scanning to slop stability studies[C].39th Symposium on Engineering Geology and Geotechnical Engineering.Butte:Montana,2004.
[4]Kayen,Robert,Bays.Ground-LIDAR visualization of surface and structural deformations of the niigata-ken chuetse[J].Earthquake Spectra,2005(22):147-162.
[5]A.Abellán,J.M.Vilaplana,J.Martínez.Application of a long-range terrestrial laser scanner to a detailed rockfall study at Vall de Núria(Eastern Pyrenees,Spain)[J].Engineering Geology.2006,88:136-148.
[6]Chigira,M.,Duan,F.,Yagi,H.,Furuya,T..Using an airborne laser scanner for the identification of shallow landslides and susceptibility assessment in an area of ignimbrite overlain by permeable pyroclastics[J].Landslides.2004,1(3):203-209.
[7]Corsini, A., Borgatti, L., Caputo, G., etal.Investigation and monitoring in support of the structural mitigation of large slow moving landslides:an example from Ca'Lita(Northern Apennines,Reggio Emilia,Italy)[J].Nat.Hazards Earth Syst.Sci.2006(6):55-61.
[8]Lollino,G.,Pasculli,A.,Sciarra,N.,et al.An integrated methodologybased on LIDAR,GPS and photogrammetric surveys applied to large landslide in San Martino sulla Marrucina(Central Italy).In:Schaefer,V.R., Schuster,R.L., Turner, A.K.(Eds.),Proceedings of First North American Landslide Conference[C].23.AEG Special Publication,Vail Colorado,2007:356-365.
[9]A.Abell'an,J.M.Vilaplana,J.Calvet,et al.Rockfall monitoring by terrestrial laser scanning-case study of the basaltic rock face at castellfollit de la roca(Catalonia,Spain)[J].Natural Hazards and Earth System Sciences.2011,11:829-841.
[10]徐进军,王海城,罗喻真,等.基于三维激光扫描的滑坡变形监测与数据处理[J].岩土力学,2010,31(7):2188-2196.XU Jinjun,WANG Haicheng,LUO Yuzhen,et al.Deformation monitoring and data prolessing of landslide based on 3D laser scaning[J].Rock and Soil Mechanics,2010,31(7):2188-2196.
[11]李会中,王团乐,黄华,等.金坪子滑坡Ⅱ区地质特征与防治对策研究[J].长江科学院院报,2008,25(5):16-20.LI Huizhong, WANG Tuanle,HUANG Hua, et al.Geological charactenistics and countermeasure research on Jinpingzi landslide one[J].Journal of Rangtee River Scientific research Institue,2008,25(5):16-20.
[12]刘祖强,张正禄,梅文胜,等.乌东德水电站金坪子滑坡监测及若干关键技术[J].水电自动化与大坝监测,2009,33(5):61-64.LIU Zuqiang,ZHANG Zhenglu,MEI Wensheng,et al.Somekey techniques of Jingpingzi Landslide monitoring at Wudongde hydropower station [J].Hydropower Automation and Dam Monitoring,2009,33(5):61-64.
[13]Baltsavias,E.Airborne laser scanning:basic relations and formulas.ISPRS J.photogramm [J].Remote Sensing.1999,54:199-214.
[14]Lichti,D.D.;Gordon,S.J.;Stewart,M.P.Groundbased laser scanners:Operation,systems and applications[J].Geomatica,2002,56:21-33.
