遥操作机器人系统主从控制策略
2013-11-19盛国栋曹其新
盛国栋, 曹其新
(上海交通大学 机械与动力工程学院,上海 200240)
主从遥控机器人可以在非结构性环境下(空间、深海、医疗等) 进行复杂的操纵作业(如航天器的装配、维修).操作者的操纵质量与对“从环境”信息(包括: 力觉、视觉等) 的真实获得能力密切相关, 借助于力觉临场感功能, 可以使操作者真实地感觉到机器人与被操作物体的动态相互作用, 这有助于操作者完成复杂精密的作业[1].此外,在医疗等方面,为防止射线对医生的危害,常搭建信号传输距离很短的主从机器人系统,如da Vinci robot[2],这类机器人系统具有精度高、延时小的特点.
双边控制是指主手和从手间的运动和力信息的交互反馈控制,文献[3]在处理遥操作焊接机器人时采用绝对坐标的位置映射,其位置控制策略采用速度边界条件和工作空间边界条件,较为繁琐.文献[4]采用双向位置反馈来实现力觉临场感, 但由于主从手间无法消除的位置误差, 使系统在自由空间运动也显得十分“迟滞”,力觉临场感较差, 直接影响系统的操作性能.基于传感器技术的提高,采用高性能的传感器实现主从手间的双向力觉反馈,文献[5]为解决从手运动速度较快时易与环境发生碰撞造成损坏的问题,引入了一系列复杂的力函数,控制复杂且位置控制精度会受其影响.文献[6]提出的双边控制算法引用绝对稳定思想,以时延相关稳定性代替时延无关稳定性,牺牲一部分不必要的稳定性, 证明了对某一给定的参数均能保证时延小于某一值时系统都稳定, 同时使力反馈时延遥操作系统的性能得到很大的改善.文献[7]针对遥操作机器人系统通信时延引起系统不稳定以及性能下降等问题研究了一种采用阻抗匹配方法分析系统在有时延和无时延情况下透明性的新方法在保证稳定的基础上实现了良好的透明性.
针对以上问题,文中搭建了一套适用于医疗和装备维修的小延时主从式机器人系统,并对其位置控制策略及力反馈策略做了相应研究.
1 主从式机器人系统
1.1 系统总体描述
该系统包括主手、从手、主控计算机、显示设备、从手前端工具、网络摄像头、工具末端摄像头及网络传输部分.该系统采用主从操作方式(图1),其中主操作手为Force Dimension公司的Omega.7,该装置具有较好的力反馈功能;从操作手为丹麦的Universal Robot(UR),具有高灵活度、轻便等特点;末端工具安装有六维力传感器,可检测环境中的力信息并反馈至主手,从而使操作者获得较好的力觉临场感;整个过程中,网络摄像头获得从手四周的三维环境,工具末端摄像头为操作从手提供更精确的局部图像,二者的视频图像传输回主控计算机,操作者可以通过显示设备实时观察从手的工作情况和三维环境中的障碍物情况并根据障碍物分布遥操作从手,实现有效的避障,工具末端摄像头随末端工具一同移动,可反馈给操作着更加清晰地局部图像,提高从手的工作精度.

图1 主从式机器人系统Fig.1 Master-slave robot system
1.2 系统控制结构
系统采用双边控制,主手将位置信息发送至从手控制器,从手控制器处理后将数据发送至从手,从手实际位置信息又反馈回主手构成位置反馈,从手与环境之间的力信息直接通过力传感器采集并发送至主手,此外, 为解决从手运动速度较快时易与环境发生碰撞造成损坏的问题,将主从位置误差用于位置反馈的同时也用于系统的力反馈控制策略中,其控制系统结构如图2.图中:Xm为主手的位移增量,矢量;Xs为从手实际的位移增量,矢量;Xer为主手与从手的位置误差,矢量;Ke为主从位置误差参与力反馈的增益常量;Fc为主从位置误差转换所得的力反馈分量,矢量;Fh为手施加给主手的力,矢量;Fe为从手与环境之间的力,矢量;Fs为从手控制力,矢量;Fb为反馈至主手的力,矢量;K为比例控制增益系数,6×6矩阵;IK为运动学逆解;FK这为运动学正解.

图2 系统控制结构Fig.2 Control structure of the system
2 位置控制
2.1 增量式工作空间映射
当系统采用绝对坐标控制位置时,主手工作空间原点与从手工作空间原点是固定的,当系统开始工作时,主手和从手都要先完成回原点的初始化工作,这对一些要求机器人姿态特殊的场景是及其不便的.
本系统采用增量式位置控制方式(图3),系统开始工作时,主手任意初始位置为原点,从手工具末端初始位置为其对应的坐标原点,有效地避免了初始回原点的繁琐操作.
然后主手以一定频率读取其增量值Xm,如式(1),乘以一个系数K,得到从手位置增量KXm,再由式(2)得到从手目标位姿,通过逆解运算得到机械臂各关节的角度,再由TCP/IP发送至从手,从手接收到指令完成相应运动,并通过将数据反馈回主控计算机保证其位置控制精度.
Xm=Mf-Mi
(1)
Xf=Xi+KXm
(2)
此外,在使用该位置控制策略时,当操作者直接观察被操作环境信息时与操作者通过图像设备观察被操作环境信息时,主从间位置对应不同,可通过调整矩阵K进行主手与实际环境或主手与图像设备的坐标匹配,进而获得较好的视觉临场感[8].

图3 主从工作空间映射Fig.3 Master-slave workspace mapping
2.2 变比例控制
主手与从手的工作空间一般是不同的.提高主手的工作空间与从手的工作空间比可提高机器人控制的精度;相反,减小主手与从手工作空间的比值则降低机器人运动的精度[3].为满足不同情况下,从端机械臂快速与慢速移动灵活切换的要求,本系统依据主端位移增量的范围采用变比例控制的方式.具体如表1,其中位移增量Xm的采样周期为100 ms.
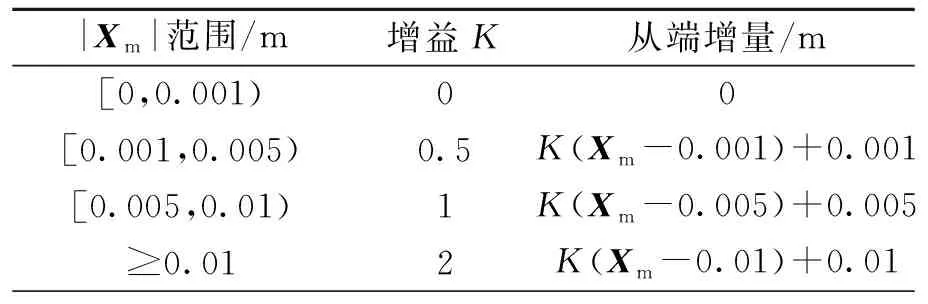
表1 从端增量计算方法Table 1 Incremental calculation method of slave robot
如表1所示,当主手端位移增量的绝对值小于0.001m时,则认为是由于操作者抖动引起的误差,此时增益系数K为0,从端不动;当主端位移增量的绝对值在0.001~0.005 m时,实现主从缩小比例(2∶1)的控制,可实现从端小范围高精度的操作;当主端位移增量的绝对值在0.005~0.01 m时,实现同比例(1∶1)的控制,在由从端快速运动转到慢速运动过程中起缓冲作用,避免了由于加速度过大带来的机械臂震荡;当主端位移增量的绝对值在0.01~0.015 m时,实现主从放大比例(1∶2)的控制,适用于从手工具末端距离目标点较远时的快速靠近.
3 力反馈控制
从手工具端使用力传感器可以很好的获得末端工具与外界环境之间的作用力,将获得的力反馈至主手可使操作者获得较好的力觉临场感;但是进一步为了解决从手自由运动且速度较快时突然与外界环境发生碰撞造成损坏的问题,将主从位置误差引入系统力反馈控制策略,由图2可得:
Fc=-Ke(Xm-Xs)
(3)
Fb=Fc+Fs
(4)
反馈至主手的力Fb包含了主从位置误差,当主从位置误差较大时,反馈至主手的反向力也增大;当主从位置误差较小时,反馈至主手的反向力也减小.使用这种方法,系统的透明性会有所降低,即当从端自由运动时,仍然有力信息反馈至主手,带来一定的粘滞感,但该方法能够有效地提高系统的安全性,避免了因从端速度过快操作者反应不及时造成碰撞.此外,一旦因操作失误系统与外界环境发生碰撞,即当传感器测得力发生较大幅度的突变时(此处设定阈值为10 N),则切断主从映射并锁死主手,从手沿碰撞力的方向运动至无碰撞的区域,当测得力小于0.5 N时,系统自动重新建立主从映射,同时释放主手,操作者可继续控制从手.
由于文中所搭建的机器人系统传输距离很短(10 m左右),时延很小,所以使用文献[6]中所提到的绝对稳定思想,以时延相关稳定性代替时延无关稳定性.由于本系统时延可以忽略不计,所以在参数Ke任意给定时,都能够满足稳定的条件.
另外,为了使操作者感觉不到力信息的抖动,获得最佳的力觉临场感效果,力反馈信息的更新频率至少为1 000 Hz[9],因此文中采用1 000 Hz的频率刷新力反馈信息.
4 实验与仿真结果
4.1 位置控制策略验证
为了验证该方法的有效性,通过图1所示的主从机器人系统,采取主从1∶1的比例,在有位置反馈和无位置反馈时分别进行试验验证.图4为机器人沿单一方向运动时误差的累积情况,从结果可以看出,该方法成功地消除了线性误差的累积,保证机器人在大范围内的精确度;进一步在有反馈情况下验证了机器人各方向运动时主从位置跟踪的准确性.图5表示机器人在Y方向上主从位置跟踪的情况,结果显示系统的位置控制具有较高的准确性,此外,实验结果显示系统时延很小(小于0.03 s)(图6).

图4 机器人位置控制误差结果Fig.4 Results of position control error

图5 主从位置曲线Fig.5 Position of the master and slave

图6 位置控制时延Fig.6 Time delay of position control
4.2 力反馈策略仿真验证
为了验证力反馈策略的有效性,文中用MATLAB/Simulink进行了仿真(图7),其中虚拟环境力Fe由信号发生器产生的square波表示,omegaposition.mat为主手增量的采样数据,realposition.mat为从手增量的采样数据,计算其误差乘以增益Ke并与环境力一起反馈至主手.根据位置控制验证,力反馈仿真图中,延时环节设为0.03 s,环境力Fe与反馈力Fb的仿真结果如图8,结果表明:该方法能够有效的实现力反馈,并且由计算主从位置误差引入的系统时延很小,能够满足力反馈的实时性要求.

图7 仿真示意图Fig.7 Simulation diagram

图8 仿真结果Fig.8 Simulation results
4.3 力反馈策略实验验证
使用图1中系统进行主从操作实验,通过操作力觉交互设备在木板上打孔实验,测得的力与位置数据(图9).
从图中数据可以看出,系统在自由运动、接触运动和钻孔运动过程中都能够有效地实现力反馈,且在图中A点位置,可以看出当主从位置误差增大时,系统反馈至主手的力也在传感器所测力的基础上进一步增大,较大的反馈力对主手的运动起到限制作用,防止了主从误差的进一步增大,提高了系统的准确性.此外,在自由运动时,从端没有任何受力,但由于主从位置误差的存在,主手能够感受到反馈力的存在,虽然这会在一定程度上降低系统的透明性,但由于反馈力很小,所以不影响操作者正常操作,因此,本系统能够在各种情况下都能够实现很好的力反馈.
5 结论
搭建了一套主从式机器人系统,并对其双边控制策略进行了研究.采用增量式位置控制策略,易于建立主端与从端的工作空间映射,并使用位置反馈提高了系统的控制精度;解决了主从运动比例变化的问题;将主从位置误差引入系统的力反馈控制策略,分析系统的稳定性,并通过实验手段及使用MATLAB/Simulink仿真的手段分别验证了主从机器人系统对位置控制策及力反馈策略的准确性和有效性.
参考文献(References)
[1] 陈卫东,席裕庚,蔡鹤皋. 具有力觉临场感的主从遥控机器人系统的双向控制[J]. 宇航学报,1999,20(3):69-75.
Chen Weidong, Xi Yugeng, Cai Hegao. Bilateral control of master-slave telerobot system with force telepresence [J].JournalofAstronautics,1999,20(3):69-75.(in Chinese)
[2] Michael E M. The da Vinci Robot[J].JournalofEndourology,2006, 20(12): 986-990.
[3] Chotiprayanakul P,Liu D K. Workspace mapping and force control for small haptic device based robot teleoperation[C]∥Proceedingsofthe2009IEEEInternationalConferenceonInformationandAutomation., Zhuhai/Macau, China.2009:1613-1618.
[4] Artigas J,Ryu J,Preusche C. Time domain passivity control for position-position teleoperation architectures[J].TeleoperatorsandVirtualEnvironments,2010,19(5):482-497.
[5] Hua Changchun,Yang Yana.Transparency performance improvement for bilateral teleoperation with direct force-feedback control[C]∥2011IEEEInternationalSymposiumonHapticAudio-VisualEnvironmentsandGames.Qinhuangdao, Hebei,2011,62-67.
[6] 邓启文,韦庆,李泽湘. 力反馈时延遥操作系统的时延相关稳定性分析[J].控制理论与应用,2007,24(5):815-818.
Deng Qiwen, Wei Qing, Li Zexiang. Analysis of delay-dependent stability for time-delay teleoperating systems with force-reflection [J].ControlTheory&Applications,2007,24(5):815-818.
[7] 曾庆军,刘海霞,赵呈涛.具有时延的遥操作机器人系统稳定性与透明性研究[J]. 江苏科技大学学报:自然科学版,2012, 26(6):581-586.
Zeng Qingjun, Liu Haixia, Zhao Chengtao. Stability and transparency study for teleoperation system with time delay[J].JournalofJiangsuUniversityofScienceandTechnology:NaturalSicenceEdition,2012, 26(6):581-586.(in Chiese)
[8] 李建民,王树新,张建勋,等.微创手术机器人控制策略[J]. 天津大学学报,2011,44(10):884-889.
Li Jianmin, Wang Shuxin,Zhang Jianxun,et al.Control strategies of minimally invasive surgery robot [J].JournalofTianjinUniversity,2011,44(10):884-889.(in Chinese)
[9] Sensable Technologies,Inc.3DTOUCHTMSDK(version 1.0)[EB/OL].http://www.sensable.com,2009,9.