船用蒸汽发生器水位的模糊自适应PID控制
2013-11-12张永生赵淑琴
张永生,赵淑琴
中国舰船研究设计中心,湖北武汉 430064
0 引 言
蒸汽发生器作为船用核动力装置的重要设备,其水位控制十分重要,直接关系到系统的安全稳定运行。目前,无论是在陆上核电厂还是舰船核动力装置中,蒸汽发生器的水位控制一般采用常规三冲量PID控制,智能控制的应用尚不多见[1]。但因蒸汽发生器是一个非线性、时变、大滞后的系统,而常规PID控制器的参数整定又存在局限性,因而控制效果并不理想。基于模糊控制理论的模糊自适应PID控制器是模糊控制与常规PID控制的结合,它能根据模糊控制规则对PID水位控制器的参数进行在线调整,可改善控制系统的控制效果。文献[2-4]对锅炉汽包水位的模糊自适应PID控制进行了研究,实现了PID参数的在线整定,其仿真结果表明了模糊自适应PID控制的有效性。
本文将把模糊自适应PID控制应用到船用蒸汽发生器的水位控制中,以提高水位控制器的动态性能和舰船的机动性;将采用集总参数化模型[5],设计一种基于模糊控制理论的蒸汽发生器的模糊自适应PID水位控制器,并通过仿真试验来验证这种水位控制器的有效性。
1 模糊控制系统设计
1.1 模糊自适应控制原理
基于模糊控制的基本原理,本文研究设计了一种蒸汽发生器的模糊自适应PID水位控制器,图1所示为控制原理图。其中,水位控制器为模糊自适应PID控制器,流量控制器采用常规的PI控制器。模糊控制器是以水位的偏差E和偏差变化率EC为输入量,输出量为PID参数的修正量Kp,Ki和 Kd。蒸汽发生器的模糊自适应PID控制器就是根据当前的水位偏差E和偏差变化率EC,通过模糊推理不断地调整PID的参数来实现PID控制器参数的在线整定。图中,L0为水位设定值;L为水位测量值;Qs为蒸汽流量;Qfw为给水流量;α1为蒸汽流量传感器;α2为给水流量传感器;α3为水位传感器。
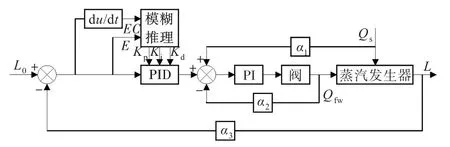
图1 模糊自适应PID控制原理图Fig.1 Schematic diagram of fuzzy adaptive PID control
1.2 模糊控制器的设计
模糊控制器的控制精度随模糊控制器维数的增加而提高,但模糊控制规则却更加复杂,控制算法更加难以实现。因此,本文采用二维模糊控制规则设计蒸汽发生器的模糊自适应PID水位控制器,模糊控制器的各语言变量:E为水位误差,EC为误差变化率,Kp,Ki和Kd为控制量,它们的论域均为[-6,6]。模糊子集为NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中)和PB(正大),E,EC,Kp,Ki,Kd的隶属度函数如图2所示。
1.3 模糊控制规则表设计
模糊控制器根据模糊控制规则进行模糊推理对PID参数进行在线整定。模糊控制规则是设备操作经验的总结,其中包含了现场可能出现的各种情况的操作经验[6-8]。对于不同的E和EC,Kp,Ki和Kd的整定原则如下:

图2 隶属度函数Fig.2 Membership function
1)当E较小时,为了调高系统的稳定性,Kp与Ki均应取得较大。同时,为了避免系统在设定值附近出现振荡,并考虑系统的抗干扰性,当EC较大时,Kd可取得较小;而当EC较小时,Kd可取得较大。
2)当E中等大小时,为了减小系统的超调量,Kp应取得较小。此时,Kd的取值对系统的影响较大,应取得较小,而Ki的取值则要适当。
3)当E较大时,为了提高系统的跟踪性,Kp应取得较大,Kd应取得较小。同时,为了减小系统的超调量,应限制积分项的作用,通常取Ki=0。
模糊自适应PID控制器的参数Kp,Ki和Kd的模糊控制规则[9-10]如表1~表3所示。

表1 Kp的模糊控制规则表Tab.1 Fuzzy control rule table ofKp
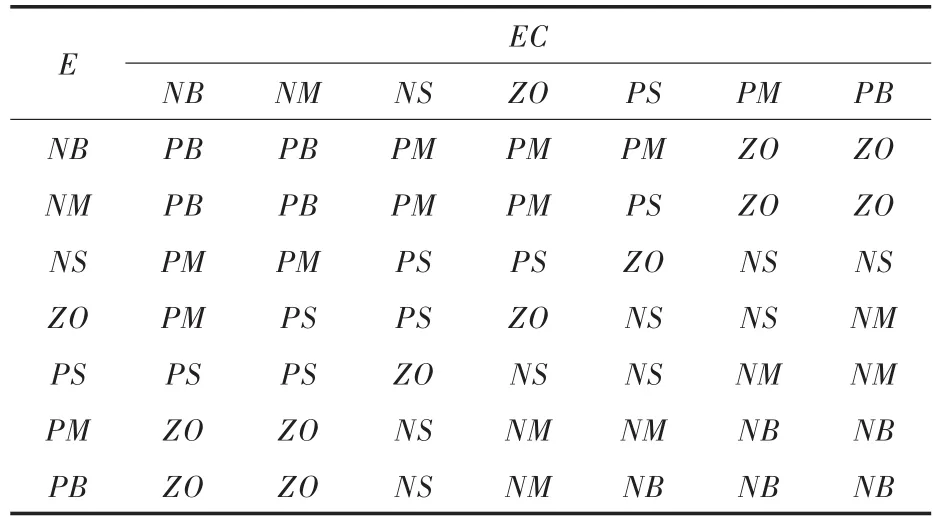
表2 Ki的模糊控制规则表Tab.2 Fuzzy control rule table ofKi
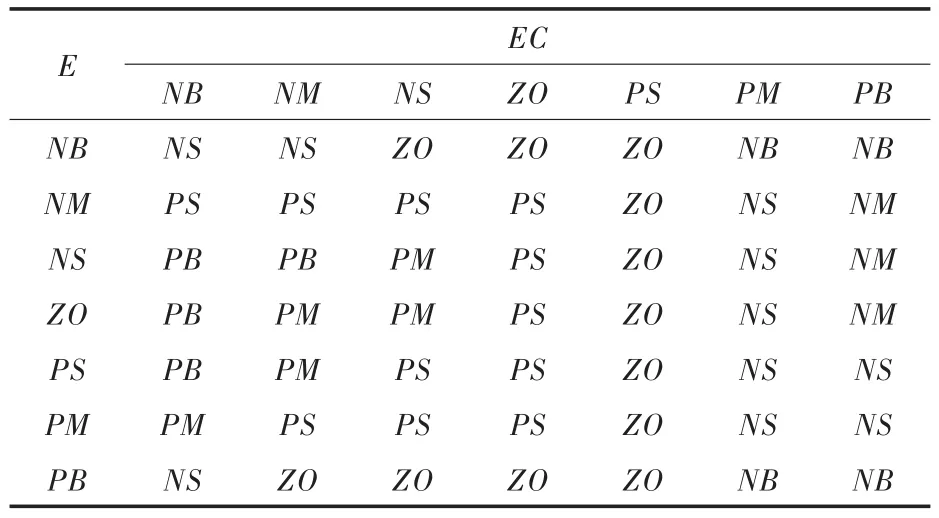
表3 Kd的模糊控制规则表Tab.3 Fuzzy control rule table ofKd
2 仿真结果分析
为了验证所提模糊规则的有效性,运用Matlab/Simulink仿真平台,建立蒸汽发生器的集总参数化数学模型,将反应堆简化为一个热源,考虑了一回路向二回路传递热量时的延时特性(即热惯性)。设计并实现了蒸汽发生器的模糊自适应PID水位控制器,控制规则表(以Kp为例)的三维外观图如图3所示。

图3 控制规则表的三维外观图Fig.3 Three-dimensional diagram of fuzzy control rule
对蒸汽发生器的变负荷工况进行了仿真试验:200 s之前蒸汽发生器100%负荷运行,200 s时蒸汽负荷阶跃下降30%。图4所示为上述工况下蒸汽发生器水位的动态变化趋势,其中,图的纵坐标数据作了无量纲化处理,为额定值与实际值的比值。
为便于分析比较,本文根据模糊自适应PID控制与常规三冲量PID控制,分别设计了相应的蒸汽发生器水位控制器。在常规三冲量PID控制的主控制器中,Kp=21,Ki=0.46,Kd=0。模糊自适应PID控制的主控制器的初始参数为Kp0=15,Ki0=0.1,Kd0=0,模糊控制器的输入量E和EC的量化因子分别为1和0.5,输出量 Kp,Ki,Kd的比例因子分别为0.1,0.1,0。由图4可看出,在变负荷工况过程中,与常规三冲量PID控制相比,模糊自适应PID控制的蒸汽发生器水位的超调量减小了约35%,调节时间缩短了约50%。它能使给水阀的动作更加平稳,减小了水位的波动,且对“虚假水位”也有一定的抑制作用。

图4 水位的动态变化趋势Fig.4 Dynamic trend of water level
3 结 语
由上述仿真结果可以看出,蒸汽发生器的模糊自适应PID控制器是通过模糊推理,在线整定PID控制器的参数来对水位进行控制的,其与常规PID控制器相比,超调量减小了约35%,调节时间缩短了约50%。模糊自适应PID控制器不仅减少了蒸汽发生器水位的波动,而且对“虚假水位”也有一定的抑制作用,改善了水位控制系统的控制效果。
[1]张永生,马运义,高伟,等.核动力蒸汽发生器水位的前馈反馈控制[J].船海工程,2010,39(4):132-134.ZHANG Yongsheng,MA Yunyi,GAO Wei,et.al.Feedforward-feedback control of water level for the nuclear powered steam generator[J].Ship and Ocean Engineering,2010,39(4):132-134.
[2]XUE W J,LIU Y X.Boiler drum level controlled by fuzzy self-adapting PID[C]//2009 Second Asia-Pacific Conference on Computational Intelligence and Industrial Appications.Wuhan,China,2009.
[3]ZHANG Y N,LI H X.A self-adjusting fuzzy control for the drum water level[C]//Proceeding of the 2010 IEEE International Conference on Information and Automation.Harbin,China,2010.
[4]黄付刚,李兰君,王馨.基于模糊-PID控制的锅炉汽包水位自适应研究[J].机电信息,2010(6):101-102.
[5]ZHANG Y S,MA Y Y.A simplified lumped parameter model for U-tube steam generator[C]//1st International Conference on Electrical and Control Engineering.Wuhan,China,2010:253-256.
[6]郑文杰,张习睿.基于模糊PID参数自调整的锅炉汽包水位控制设计[J].水利电力机械,2007,29(1):16-19.ZHENG Wenjie,ZHANG Xirui.The research of drum level control of boiler based on self tuning fuzzy PID[J].Water Conservancy and Electric Power Machinery,2007,29(1):16-19.
[7]于洪泽.锅炉汽包水位自整定模糊PID控制[J].沈阳师范大学学报:自然科学版,2008,26(3):294-296.YU Hongze.Self regulation fuzzy PID control of boiler steam drum water level[J].Journal of Shenyang Normal University:Natural Science Edition,2008,26(3):294-296.
[8]张乐,王有朋,周浚哲.锅炉汽包水位控制系统的设计-模糊自整定PID控制器设计[J].科技信息,2008(19):42,67.
[9]孙丰雷,隋江华,张文孝.船用锅炉水位模糊自适应PID控制仿真[J].中国水运,2009,9(11):100-101,106.
[10]张松兰,何坚强.锅炉汽包水位模糊自适应控制策略[J].盐城工学院学报:自然科学版,2010,23(1):61-64.ZHANG Songlan,HE Jianqiang.Strategy of fuzzy adaptive control for boiler’s drum water level[J].Journal of Yancheng Institute of Technology(Natural Science Edition),2010,23(1):61-64.
