基于Vx Wor ks的主机安保系统设计
2013-11-10张秦峰王秀丽
张秦峰, 王秀丽
中海船研科技股份有限公司军船产品部,上海200135
0 引 言
随着综合平台管理系统和标准化硬件在新型舰船上的应用,传统的仅基于现场总线(Contr oller Area Net wor k,CAN)的主机安保系统已不满足平台系统标准化的要求。因此,需要开发一种新型的主机安保系统适应标准化的综合平台管理系统。从硬件设计、软件设计、试验验证等方面,介绍基于Vx Wor ks的主机安保系统。该新型安保系统利用Vx Wor ks操作系统的可靠性、实时性和优秀的网络处理能力,实现主机的状态信号采集、安全保护以及与综合平台管理系统数据的联通。
1 硬件设计
1.1 系统概述
主机安全保护系统的核心为安全保护控制模块,并配置基于CAN总线的输入/输出(Input/Output,I/O)模块、转速传感器、压力传感器、开关量传感器、继电器、电磁阀等I/O设备,通过网络交换机连接综合平台管理系统,实现数据的交互和显示(见图1)。
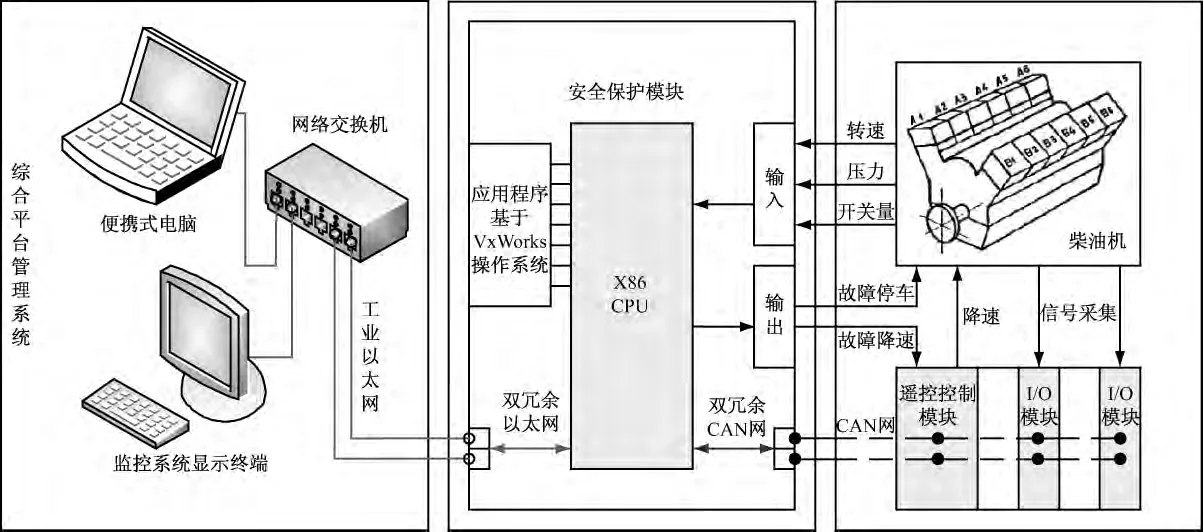
图1 主机安保系统组成图
1.2 硬件设计
主机安全保护系统的主要功能是,通过采集主机传感器发送的转速信号、压力信号、开关量信号、I/O扩展模块以及CAN总线发送的主机参数,综合处理主机的起动联锁、故障降速、故障停车。并将处理结果通过继电器、电磁阀等输出至主机或遥控系统,对主机进行安全保护。作为综合平台管理系统的一个单元,通过以太网将所有主机安保系统数据发送至平台网络,在上位机界面显示,并具备故障诊断、时统等功能。
为了实现安全保护系统功能,在设计硬件时,核心硬件选用了现场控制模块。该模块属于综合平台管理系统标准化硬件,具有信号处理、控制输出、网络通讯和故障报警等功能(见表1)。

表1 现场控制模块功能、性能
现场控制模块采用双层板卡结构(见图2),核心板采用低功耗嵌入式Pentiu m II CPU(主频200 M),内存容量128 M,支持板载存储(容量2 G),支持板级故障报警,支持看门狗自复位功能,核心板提供2个板对板高密度总线连接器,用于将信号连接到底板上;底板主要功能是数据采集、信号I/O和网络通讯等。
2 软件设计
2.1 软件需求
1)功能需求见表2。
2)性能需求见表3。
2.2 软件设计的考虑
2.2.1 操作系统的选择
为保证应用软件多任务处理时的可靠性和实时性,现场控制模块选用Vx Wor ks5.5嵌入式操作系统,使用Tor nado2.2开发应用程序。Tor nado是Wind River公司为开发Vx Wor ks提供的集成开发环境,其基本目的和作用,是将与操作系统及应用程序运行无关的工作(如编辑、编译、测试、配置等)与目标机分离,使这些工作一方面不会与操作系统争夺资源,另一方面作为一个集成开发环境方便系统的开发和调试。Tornado不仅包括各种开发和调试工具,还包括目标服务器部件,完成主机上的各种开发工具和目标机连接的所有细节工作。
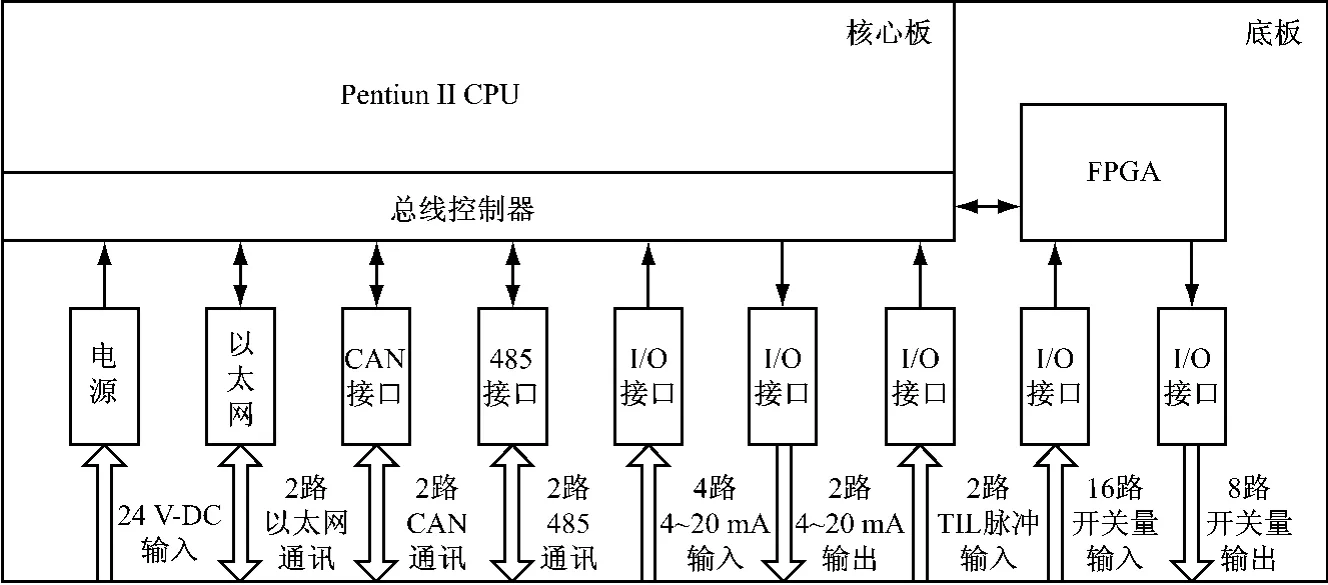
图2 现场控制模块硬件框图
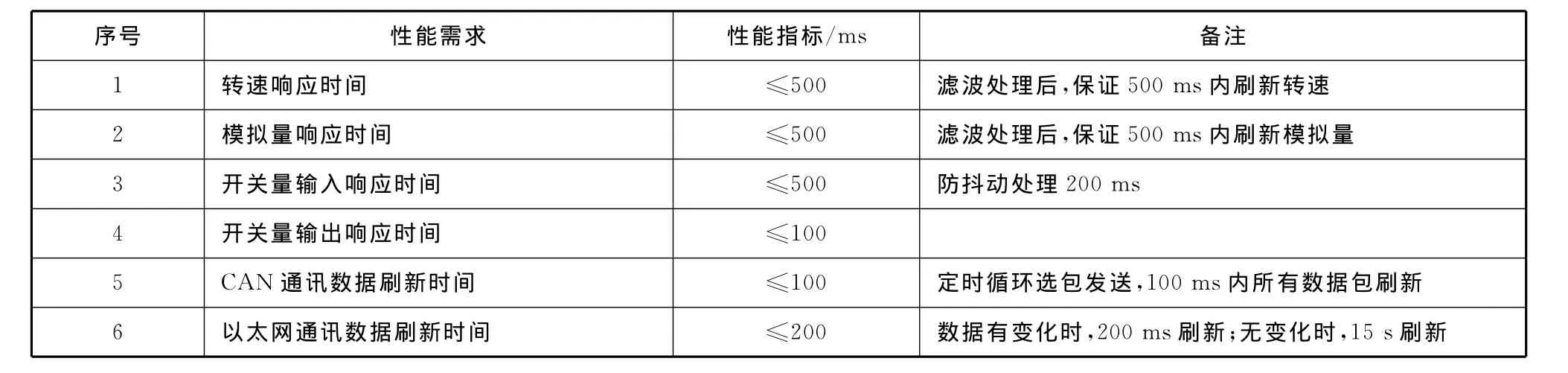
表3 安保系统性能需求表
2.2.2 Vx Wor ks环境下软件设计特点
Vx Wor ks操作系统与硬件之间有板级支持包(Boar d Support Package,BSP)。BSP在引导系统、支持系统运行过程中扮演重要角色。首先,通过BSP可以生成引导系统的bootrom;其次,引导型工程的建立基础是BSP;最后,BSP具有与用户交互的作用,可以提供一个基础的硬件调试环境。
现场控制模块对应Vx Wor ks5.5操作系统的BSP为pc m0311,在Tor nado2.2开发环境中调用该BSP包开发基于该模块的应用程序。
Vx Wor ks操作系统下开发应用程序,驱动程序库是提高开发效率的要素。与现场控制模块相关的I/O Vx Works 5.5库文件对应的头文件“pc m0311.h”(见图3)。头文件提供了驱动程序接口的原型声明。在开发应用程序时,工程中包含驱动程序库后,可以直接调用“PIRead脉冲采集”、“DIRead读入开关量”、“CANReceive”等接口函数,提高编码效率。
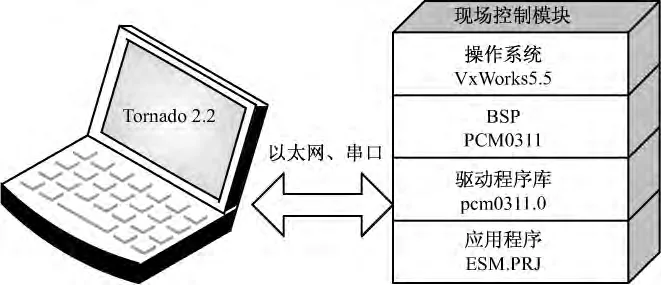
图3 交叉开发环境
2.3 软件结构
安保系统软件采用多任务模块化设计,每个任务为一个运行模块。任务调度方式为基于优先级的抢占式任务调度。每个任务有相应的优先级,优先级高的模块先运行。开关量输入任务、模拟量输入任务、频率量输入任务、开关量输出任务、基本工作处理任务、故障处理任务根据优先级设定,依次执行,并循环调用。定时发送任务利用看门狗实现定时处理。
系统上电后,经引导程序启动操作系统(见图4)。进入应用程序后,进行系统初始化和设备初始化,包括初始化设备、参数及建立多任务系统。初始化完毕后,开始多任务调度,实现对开关量、模拟量、频率量的循环采样,不断刷新数据;经工作状态处理任务后,将起动联锁、故障降速、故障停车等工作状态由开关量输出并不断更新;当有故障发生时,记录故障原因并通过网络发送。

图4 程序总体框图
2.4 程序设计
2.4.1 任务优先级分配
Vx Wor ks是一个多任务的操作系统,在利用Vx Wor ks开发主机安保系统软件的过程中,任务优先级的分配是关键技术也是难点(见表4)。在设计过程中要权衡各项功能的重要性和运行先后的合理性,在满足系统设计的各项性能指标下,高效合理地运行程序。
2.4.2 I/O处理模块设计
该模块主要调用驱动函数和滤波算法实现I/O接口需求和性能需求的各项指标(见表5)。其中,实现主机转速处理问题是主机安保系统的难点,转速处理不好,超速误报警会直接导致主机异常停车。在现场测速环境中,有时会出现干扰信号,如果没有滤波措施,会直接引入干扰,可靠性就无法保证;但过多的滤波会影响转速的刷新速度,实时性又无法保证。为兼顾可靠性和实时性,主机安保系统设计中的转速处理模块采取限幅(超限处理,异常值剔除)→递推滤波(5次)→中值滤波(去大去小求平均)的方法。在实际应用过程中,该方法可行,转速稳定,刷新正常。

表4 任务优先级分配

表5 I/O模块功能划分
2.4.3 以太网通讯模块设计
该模块对以太网通讯进行初始化处理,采用UDP通讯;把以太网发送数据整理后,根据以太网协议发送报文,并根据协议接收以太网数据(见表6)。

表6 以太网通讯模块功能划分
NTP网络校时算法说明:
T1为客户端发送对时请求报文的时戳,T2为服务器收到对时请求报文的时戳,T3为服务器响应对时请求报文的时戳,T4为客户端收到对时响应的时戳。

客户端读取实施时戳ttemp,将(ttemp+toffset)更新系统时钟。
客户端读取实施时戳ttemp,将(ttemp+toffset)更新系统时钟。
2.4.4 CAN通讯模块设计
该模块对CAN通讯进行初始化处理;把CAN发送数据整理后,根据CAN通讯协议发送报文,并根据协议接收CAN网数据(见表7)。
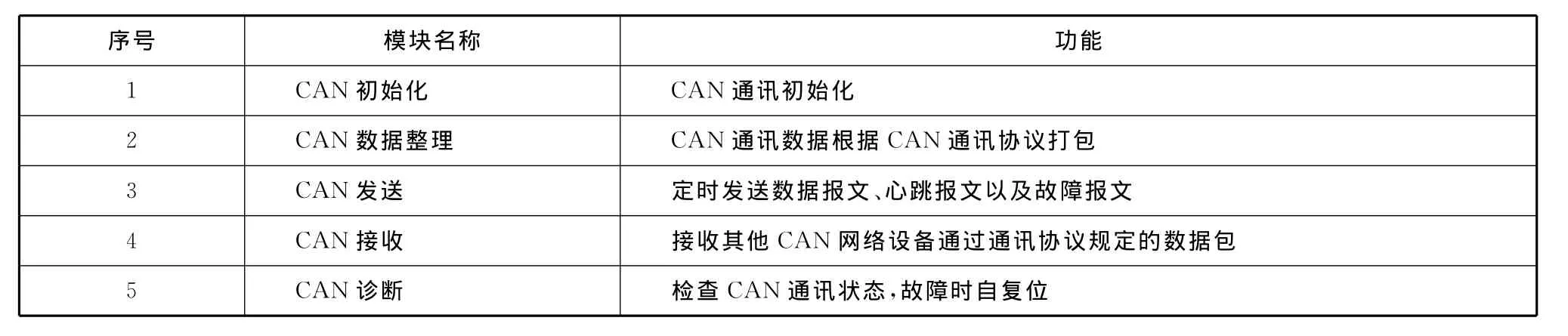
表7 CAN通讯模块功能划分
2.4.5 工作状态处理模块设计
根据I/O模块、以太网模块、CAN通讯模块获取的数据进行工作状态处理(见表8),判断主机的起动联锁、故障降速、故障停车。
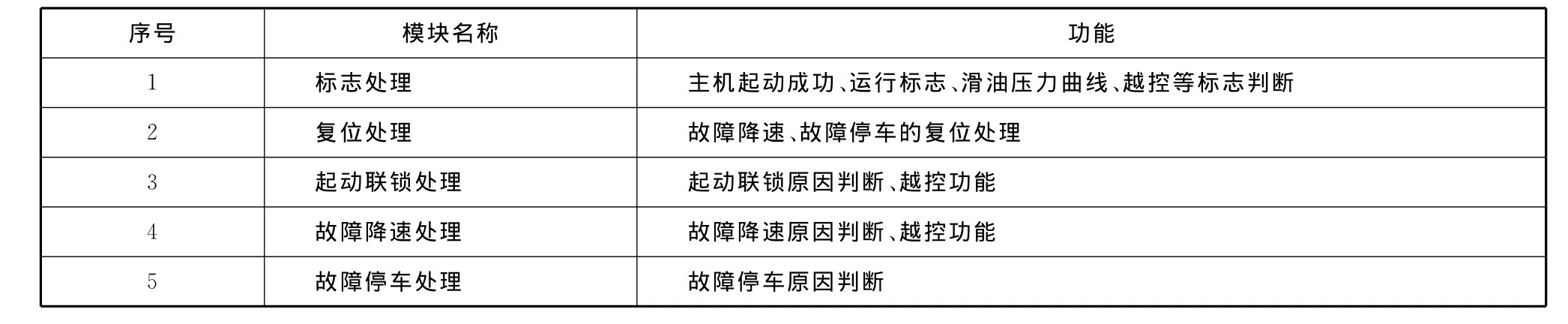
表8 工作状态处理模块功能划分
3 试验验证
3.1 试验情况
试验验证阶段主要包括安保系统的功能测试和性能测试(见表9)。测试环境为某型船的主推进装置控制监测系统。功能测试主要包括外部接口信号采集、输出信号、逻辑处理、CAN通讯收发数据和以太网收发数据的准确性和实时性。输入信号在实验室环境中通过过程校验仪和主推进装置模拟机模拟发出,在实船上采集现场传感器发出的信号。所有时间特性数据通过CAN抓包软件和以太网抓包软件截取数据计算得出。

表9 安保系统功能和性能测试
4.2 实船使用情况
该安保系统作为主推进装置监控系统的一个子系统运用于某新型船。目前,该型号船已有10余艘交付使用。在使用过程中,凭借综合平台管理系统网络化的优点,用户可以在不同位置监测主机安保系统各项参数的运行情况。在航行过程中,稳定、可靠的主机安保系统是航行安全的一项重要保障。
5 结 语
基于Vx Wor ks的主机安保系统设计,利用其优秀的网络通讯处理能力,实现了现场总线与以太网的双网数据交互,解决了传统主机安全保护系统与综合平台管理系统不匹配的问题。并凭借其良好的处理性能和实时性、可靠性,实现了对主机参数的高精度测量、主机的实时安全保护,提升了设备的生命力,可以长期可靠运行。
[1] 罗国庆.Vx Wor ks与嵌入式软件开发[M].第1版.北京:机械工业出版社,2003:15-17.
[2] 张扬,于银涛.Vx Work内核、设备驱动与BSP开发详解[M].第2版.北京:人民邮电出版社,2011:288-291.
