多平台协同搜索水雷效能分析
2013-11-09徐勇
徐 勇
(海军装备部电子部,北京 100841)
现代化反水雷作战是海空一体化联合作战,复杂程度逐步提高,专用猎扫雷舰艇、猎扫雷直升机、作战舰艇、水下无人航行器(UUV)等多种平台实施联合猎扫雷,涉及水下、水面、空中等多种平台。本文针对UUV、航空反水雷直升机在反水雷作战中的优点[1-2],通过对搜索水雷概率模型的分析,在水雷威胁探查方案优化方法[3-4]基础上,给出多平台协同搜索水雷方案优化模型,采用分析归纳和仿真计算手段,对多平台协同搜索水雷方案效能进行分析,为实际作战中多平台协同搜索水雷方案的制定、优化提供决策支持。
1 UUV组群协同搜索水雷概率模型[5]
设整个搜索区域为S,一般因无法确定任务区中目标的分布规律,可认为任务区中的目标位置分布为无规则均匀分布,针对单UUV平台而言,若采用平行均匀搜索模式,依随机搜索论,对静止水雷搜索概率为
式中,a为搜扫面积;A为搜索区域的总面积。
若采用随机搜索模式,时间t内的搜索概率为

式中,w为声纳的作用宽度,v为搜索平台的速度。
在考虑UUV相对导航定位问题、系统运行难易程度的基础上,本文将UUV组群协同搜索模式分为:划分作业区并独立搜索不同区域模式和两UUV并行搜索中间保留一定重叠区模式。
2 反水雷直升机搜索水雷概率模型
假设矩形搜索区域被分割为宽为s,长度为b的n条平行搜索带,那么搜索区域的面积A=nsb。假设反水雷直升机在每一搜索带内都沿搜索带中心线进行均匀搜索,搜索宽度为wk,wk<s。假定探测声纳对水雷的识别概率为p0,则每一搜索带进行n0遍搜索探测声纳对水雷的识别概率为

依随机搜索理论,对指定区域内静止水雷的搜索概率同式(1)。
3 UUV组群与反水雷直升机协同搜索水雷概率模型
对于不同海深的水雷目标,UUV组群最简单的协同模式是同时布放多个UUV,分别在不同水深条件下进行各自的水平面搜索,完成不同水深目标的同时搜索探测。该方案看似简单、易操作,但不同UUV间的协同难控制。此时,利用航空反水雷平台的优势,引入反水雷直升机作业平台,与UUV组群协同完成不同海深作业区域水雷搜索任务。
UUV组群与反水雷直升机协同搜索可以采取反水雷直升机和UUV组群共同搜索同一区域的方式,也可以采取划分区域搜索的方式。
当采取反水雷直升机和UUV组群共同搜索同一区域的方式时,对水雷的识别概率为

式中,pgt为共同搜索识别水雷概率;pf为反水雷直升机搜索声纳对水雷的识别概率;pc为UUV组群搜索对水雷的识别概率。
当反水雷直升机和UUV组群采取划分区域进行搜索时,在各自的搜索区域搜索概率等同于独自进行搜索的概率。
4 搜索效能模型
对多平台协同搜索水雷效能进行分析,其目的是在搜索效能最优前提下对搜索方案进行优化。搜索效率的对比主要以搜索时间为准则,水下探雷设备工作效能需从搜索发现概率(在提高搜索概率的同时需保证足够精度的正确识别概率)和搜索时间综合衡量。搜索发现概率越高、搜索时间越短定义为搜索效能最大。设搜索发现概率为P,搜索整个雷区所用时间为T,则搜索效能为

搜索方案优化本质上是在保证足够精度正确识别率的情况下,合理确定多平台搜索模式、搜索线路间隔或线路数、搜索次数、搜索平台个数等,使任务执行时间最短,同时要求总发现概率满足设定指标。表现为一个最优化问题,则时间为目标函数,总发现概率为约束条件,线路间隔、搜索次数和平台个数为优化变量,即

其中,T表示任务完成总时间,包括在作业区内的搜索时间、在作业区外的转向时间两部分;r为线路数,采用等间隔平行搜索法时,线路数与线路间隔是等价的;k为在每条线路上的搜索次数;n为搜索平台个数;P0是事先给定的一个概率指标,要求发现水雷的概率P不低于该指标。
暂不考虑UUV的回转和对水雷的规避机动,探查区内的总航程取决于r、k、线路长度和线路间隔宽度。如果各线路长度相同,均为L,线路间隔宽度均为B,则搜索整个雷区的总航程为
5 仿真分析
5.1 仿真条件
设搜索区域面积s1×s2=10km×10km,UUV搭载的侧扫成像声纳对水雷目标的探测距离为dsn=300m,UUV的航速为v=4kn;水雷出现在探测范围内的识别概率为pr=0.8,若某水雷目标同时出现在2个UUV的探测范围内,则其被正确识别的概率为0.96。反水雷直升机所携带的侧视声纳作用距离dh=500m,直升机航速vh=40kn,水雷出现在探测范围内的识别概率为prh=0.9。lam为覆盖指数,是UUV连续2条搜索路线间距离间隔与2dsn的比值,其值越大航路间隔越远。laml为重叠指数,指并行搜索的2个UUV间的重叠程度,定义为重叠区宽度与dsn的比值,其值越大重叠越严重,2个UUV间的间距越小。参数定义见图1。
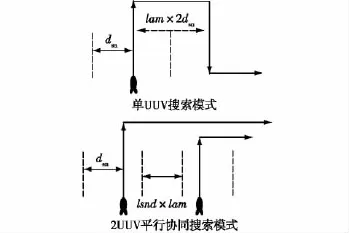
图1 参数定义
5.2 结果分析
5.2.1 有效搜索模式确定
本文假定k=1,以发现概率最大为指标,选取有效搜索模式。多数情况下,因无法确定任务区中目标的分布规律,可认为任务区中的目标位置分布为无规则均匀分布。在已知搜索区域大小的情况下,采用划分作业区并独立搜索不同区域模式和两UUV并行搜索中间保留一定重叠区模式发现目标概率统计结果如表1-2所示。

表1 两UUV 划分区域并独立搜索不同区域模式下发现目标概率

表2 两UUV 并行协同搜索模式下发现目标概率
从表1-2的计算结果可看出:
1)在指定搜索区域内,两UUV划分区域并独立搜索不同区域模式下,采用平行均匀搜索模式的发现概率大于随机搜索模式发现概率,划分区域搜索模式下推荐的有效搜索模式为平行均匀搜索模式;
2)两UUV划分区域并独立平行均匀搜索模式略优于两UUV平行协同搜索模式,发现概率提高2%~4%。由于单UUV对水雷目标的识别概率为0.8,两UUV并行搜索对共同探测区域内的水雷目标的识别正确率达到0.96,此种情况下,推荐的有效搜索模式为两UUV并行协同搜索模式。
若单UUV对水雷目标的识别概率已达0.9,此时,两UUV并行搜索对目标的正确识别概率为0.99,概率的提高并不明显,此种情况下,从协同控制的难易程度出发,推荐划分区域并独立平行均匀搜索为有效模式。
5.2.2 搜索效能分析
假定事先给定的概率指标P0=0.9,对于同一海深、同一类型的水雷目标而言,根据声纳识别概率,确定每一线路进行2遍搜索,由于P0已取为0.9,为此,将搜索效能Esearch=P/t最大简化为搜索总时间最小。优化结果如表3所示。
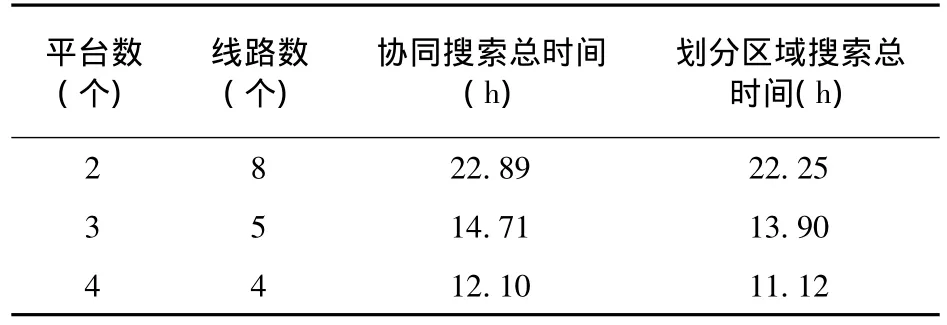
表3 多UUV不同搜索模式下发现识别水雷概率大于0.9时优化结果
对于不同海深的水雷目标而言,鉴于不同深度UUV协同控制难度,引入反水雷直升机和UUV联合完成指定区域内的水雷搜索任务。采取反水雷直升机和UUV组群共同搜索同一区域的方式时,每一线路搜索1遍,对水雷目标的识别概率达到0.98;根据不同海深采用划分区域进行搜索时,识别概率等同于独自搜索识别概率,UUV每一线路搜索2遍。当反水雷直升机声纳的工作深度能够覆盖不同海深中的水雷目标时,UUV组群与反水雷直升机协同搜索优化结果如表4所示。
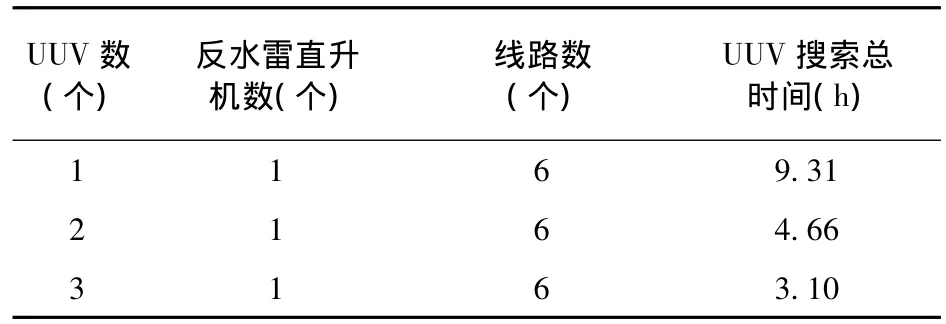
表4 UUV组群与反水雷直升机协同搜索模式下发现识别水雷概率大于0.9时优化结果
当反水雷直升机声纳的工作深度不能覆盖所有深度上的水雷目标时,采取分层搜索模式,单架反水雷直升机搜索线路数为10,搜索总时间为1.48h,UUV组群协同搜索优化结果如表3所示。
6 结束语
数值分析结果表明,在搜索声纳对水雷识别正确率的限制下,本文给出的多平台协同搜索水雷方案优化模型,能够在总发现概率满足设定指标的条件下,合理确定出多平台有效搜索模式、搜索线路数、搜索次数、搜索平台个数等,使任务执行时间最短,搜索效能最大。多平台协同搜索水雷效能分析结果可为实际作战中多平台协同搜索水雷方案的制定、优化提供决策支持。
[1] 庞继先,周健强.水下无人航行器在未来反水雷作战中的使用[J].海军学术研究,2006(9).
[2] 杨毅.美国海军航空反水雷的发展趋势[J].海军世界,2007(2).
[3] 马爱民.水雷威胁探查方案优化方法[J].海军大连舰艇学院学报,2003(2).
[4] 张年春.疏通航道反水雷优化模型[J].指挥控制与仿真,2013,35(1):55-56.
[5] 张跟鹏,刘忠,田晓东.基于UUV组群的水下协同探雷搜索与仿真[J].自动测量与控制,2007,26(4).