无人作战飞机空中加油建模与近距机动控制律设计
2013-11-04窦和锋董新民薛建平王海涛
窦和锋, 董新民, 薛建平, 王海涛
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
无人作战飞机空中加油建模与近距机动控制律设计
窦和锋, 董新民, 薛建平, 王海涛
(空军工程大学 航空航天工程学院, 陕西 西安 710038)
针对无人作战飞机(UCAV)空中加油时存在加油机尾流干扰导致相对位置难以保持的问题,基于等效气动效应法建立了UCAV动力学模型,并设计了近距机动最优飞行控制律。将加油机尾流对UCAV的影响等效为平均风速度和风梯度,计算出附加于UCAV的诱导力系数和诱导力矩系数,建立了含尾流扰动的受油机模型。以位置跟踪误差的积分为增广状态,基于加权二次型性能指标设计了近距机动最优飞行控制律。仿真结果表明,UCAV模型能真实地体现尾流对受油机的影响,并通过设计的近距机动控制律可有效实现对加油机相对位置的精确跟踪。
自主空中加油; 尾流建模; 近距机动; 最优控制
0 引言
自主空中加油(AAR)技术是无人作战飞机(UCAV)实施远程作战和快速打击的一项关键技术,能够有效提高UCAV的作战效能,增加UCAV的航程与留空时间,受到了世界各国空军的高度重视。目前,国内外已经开展了自主空中加油相关技术的研究[1-2],并取得了一定的进展。
整个AAR任务过程可分为5个阶段:初始阶段、会合阶段、中间过渡阶段、近距机动阶段和结束阶段。其中,近距机动阶段是AAR最关键的阶段,在此阶段,UCAV通过一系列机动飞行完成对接、燃油传输和退出等任务。由于UCAV与加油机距离很近,处于前方加油机尾流影响区域内,这对受油机的稳定性会产生不利影响。文献[3]在惯性坐标系下,建立了UCAV动力学方程。文献[4-5]采用相对于加油机位置、姿态和旋转角速度的坐标系建立了UCAV动力学模型。显然,以上文献仅在不同坐标系下对UCAV进行了建模,没有考虑到加油机尾流的影响。
在前期对尾流的大量研究工作[6-7]中,通常将尾流作为一个未知扰动或随机湍流加入控制律设计过程中,并未建立真实的尾流环境,为控制律设计提供验证。因此,本文采用等效气动效应法建立了加油机尾流模型,并针对AAR近距机动阶段,推导了UCAV动力学方程并分析了尾涡流场,在此基础上设计了基于线性二次型的最优位置控制律,以满足近距机动阶段的飞行要求。
1 UCAV动力学模型
1.1 平移方程
在近距空中加油时主要关注受油机与加油机相对位置,通过飞机传感器直接测得飞机姿态角及其角速度,测量值不需要进行转换即可直接使用。本文选择加油机为UCAV建模的参照坐标系。

(1)
将上式在机体系下表示为矩阵形式,可得UCAV平移运动学方程:
S(ωBRBT+RBRBTωBT)rBR
(2)

由动量定理可知:
(3)
为将风速的影响加入到方程,对式(1)进行微分带入上式,可得:
(4)

(5)

(6)
式中,状态变量为χR=[V,β,α]T。则式(5)重写为:
(7)
风速的时间导数为:
(8)
作用于UCAV的外力F是GR、空气动力AR和推力PR的合成。因此FBR可表示为:
FBR=RBRBTRBTIMR+RBRWRAR+PR
(9)
空气动力为:
(10)

将式(7)和式(8)代入式(4),可得平移动力学方程:
(11)
其中:
1.2 转动方程
旋转运动学方程可以采用Poisson方程式表示:
(12)
式中,ωBRBT=[pRT,qRT,rRT]T为受油机相对于加油机坐标下的速度向量角。关于OI的外力矩为:
(13)
由于飞行器实际控制量为关于点OBR的外力矩MBR,因此有:
MBR=MO-rBR×F
(14)
将式(12)和式(3)代入式(13),得:
(15)
上式包含了ρi的导数。ρi的时间导数为:
(16)
(17)
将式(16)带入式(14),可得:
(18)
对上式进行简化[8],最终的转动力学方程为:
IR(ωBRBT+RBRBTωBT)
(19)
式中,IR为UCAV的惯性矩阵;MBR为UCAV机体系原点的合外力矩,可表示为:
(20)

2 加油机尾流建模
在进行加油机尾流建模时,首先需建立尾流速度模型,得到空间中任意位置的尾流场风速。采用等效气动效应法,对UCAV所受的风速进行等效转换,计算出附加于UCAV的诱导力系数和诱导力矩系数,从而得到考虑加油机尾流影响的UCAV动力学模型。
2.1 加油机尾流速度建模
Burnham模型是一种简单实用的尾流场模型,可以满足加油机尾流场的精度要求[8]。Burnham模型描述的合成诱导速度为:
(21)

图1为加油机尾流速度合成的原理示意图,尾流场中任一位置的速度可用两尾涡诱导速度的合成速度等效。图中,p为UCAV上的任一点,VθL,VθR和Vs分别是左、右尾涡在点p处的诱导速度和两尾涡的合成诱导速度。Oxtytzt和Orxryrzr分别为以加油机与UCAV质心为原点的机体轴系,aL与aR为尾涡线,两尾涡线的距离为B。rR为右尾涡中心到UCAV上某点的向量,表示为[rRx,rRy,rRz]T,其在yz平面的投影矢量长度为rRyz。结合式(21)可知,VθR的表达式为:

(22)
与此类似,可以得到VθL的表达形式。
图1中,当UCAV处于加油机尾部右下方时,点p到两尾涡中心的向量与Owyw间的夹角θL,θR为:
(23)
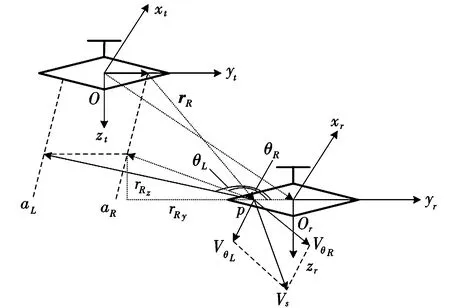
图1 尾流速度合成原理Fig.1 Wake speed synthesis principle
合成诱导速度Vs在加油机机体坐标系Oxtytzt中沿yt轴和zt轴方向的速度分别为:
Vsy=-VθLsinθL+VθRsinθR
(24)
Vsz=-VθLcosθL+VθRcosθR
(25)
由于Vsy与Vsz不可直接用于计算僚机所受气动影响,将其转换到僚机的机体坐标系中,表述为:
(26)
式中,VBR为机体轴系中尾流场作用于UCAV的风速度矢量;Vx,Vy,Vz分别为尾流作用于UCAV的迎面速度、侧洗速度与下洗速度,其大小随p点的改变而不同,在整个空间分布具有非均匀性。
2.2 尾流场对UCAV影响建模
由于加油机尾流场的非均匀性,使其不能直接用于基于空速、迎角与侧滑角的标准气动力及力矩方程。本文采用等效气动效应法[8],将非均匀风场对UCAV的作用看作是等效的均匀风场作用在UCAV的质心上,由此非均匀的风速度和风梯度可近似转化为均匀的风速度和风梯度,从而计算出诱导力和力矩。
等效风速度Veff可分解成等效下洗速度Veffz、等效侧洗速度Veffy和等效迎面速度Veffx。其计算方法类似,下面以Veffz为例,说明具体的计算原理。在UCAV上选取一面积微元dS,该微元在xryr平面上的投影为dSxy,则UCAV所受到的下洗速度效果为:
(27)
由此可得等效下洗速度Veffz表达式为:
Veffz=F/Sxy
(28)

3 近距机动控制律设计
为抑制加油机尾流带来的影响,需设计控制律保证UCAV与加油机间的相对位置。将尾流带来的影响看作力和力矩扰动,并对以上方程进行线性化,可得UCAV状态方程如下:

(29)

因为位置跟踪控制器根据UCAV与加油机的相对位置而设计,定义输出为:
y=[ΔxΔyΔz]T
(30)
为保证位置零跟踪误差,增加位置偏差的积分作为状态量,表示如下:
(31)

(32)
以位置跟踪误差的积分为增广状态,系统方程转化为:
(33)
选择性能指标:
(34)
(35)
UCAV近距机动的位置控制器结构如图2所示。

图2 位置控制器结构图Fig.2 Position controller structure
4 仿真分析
以KC-135模型为加油机平台,分析空中加油过程中加油机尾流对UCAV动力学特性的影响,并验证所设计控制律的性能。在空中加油对接阶段,要求UCAV从会合点能够以较快的速度减小两机前后距离。加油机以速度为200 m/s,高度为7 050 m作匀速直线平飞,UCAV在加油机坐标系下的初始加油位置(-40.56,60.96,6.46) m。加油任务开始,UCAV需从初始位置机动飞行到加油位置(-25.33,0,6.46) m。在此期间,UCAV需进行两次机动飞行,第一次机动是UCAV由加油机右后方保持高度不变水平机动至加油机正后方;第二次机动是UCAV向前机动至指定加油位置。图3为等效气动效应法计算得到的等效尾流速度与角速度。图4为UCAV位置的跟踪过程。图5为UCAV飞行姿态的动态过程。由图可知,等效气动效应法真实地体现了加油机尾流对UCAV的影响,所设计的近距机动控制律能够根据UCAV与加油机的相对位置误差产生合理的控制指令,使UCAV快速机动到指定位置。其中,在进行横向机动时,随着UCAV逐渐靠近加油机,所受平均风速度、风梯度逐渐增强,导致横向与纵向出现小幅度波动,但UCAV能够在控制律作用下保持较好的位置跟踪。在进行纵向机动时,UCAV受到的尾流影响变化较小,控制律具有良好的跟踪效果。
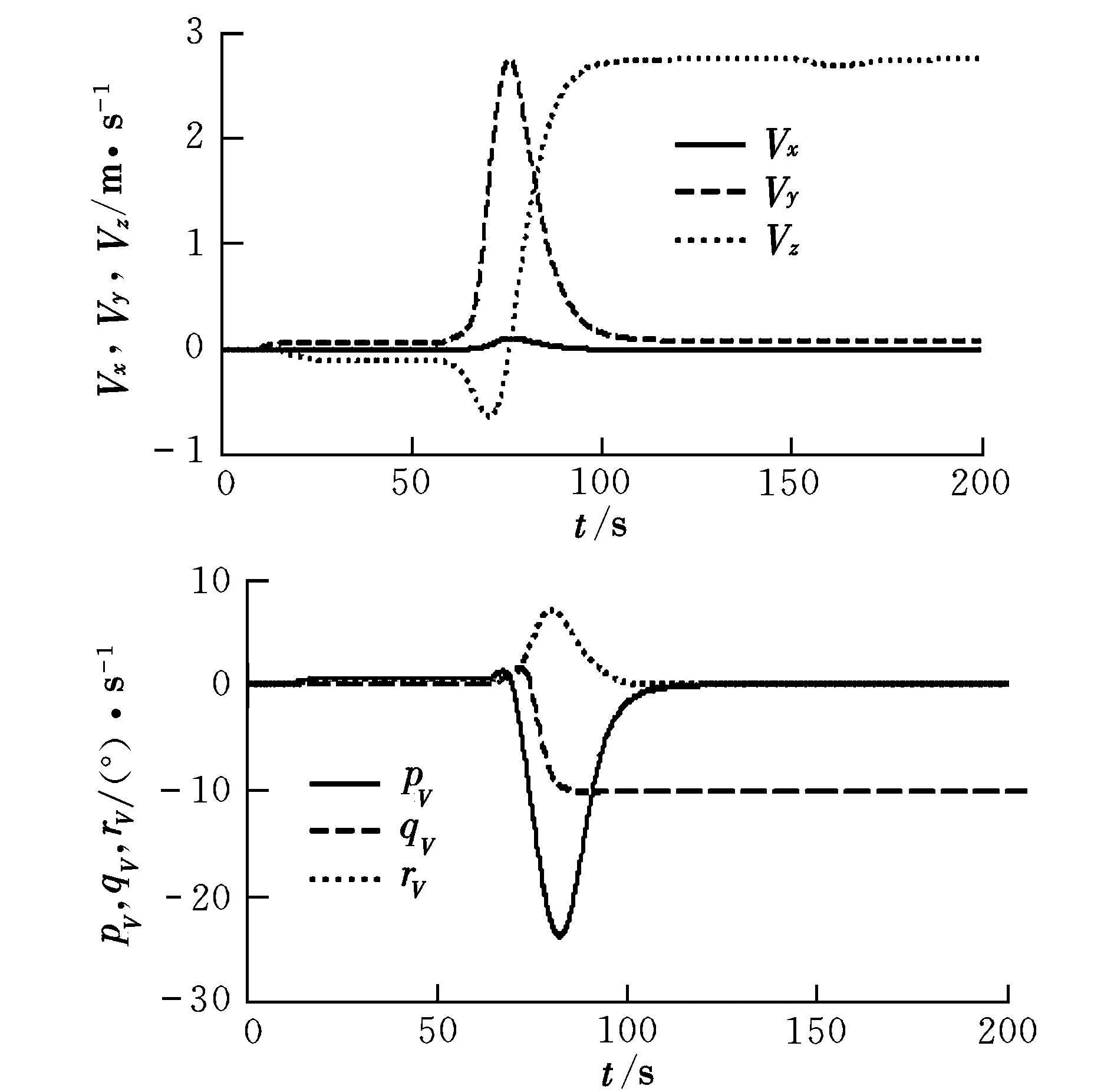
图3 等效尾流速度与角速度Fig.3 Equivalent wake speed and angular speed
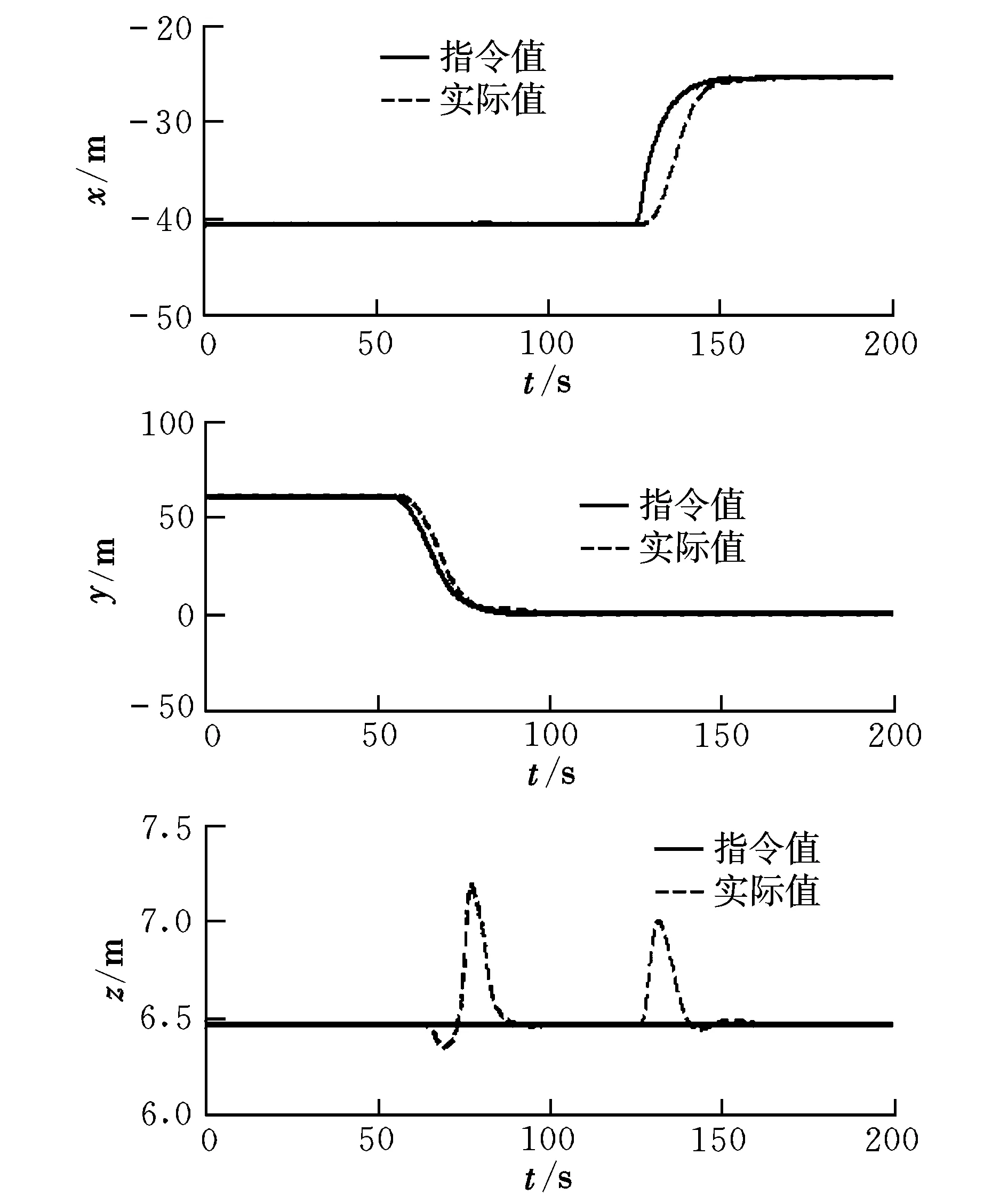
图4 UCAV位置的跟踪过程Fig.4 Position tracking process of UCAV
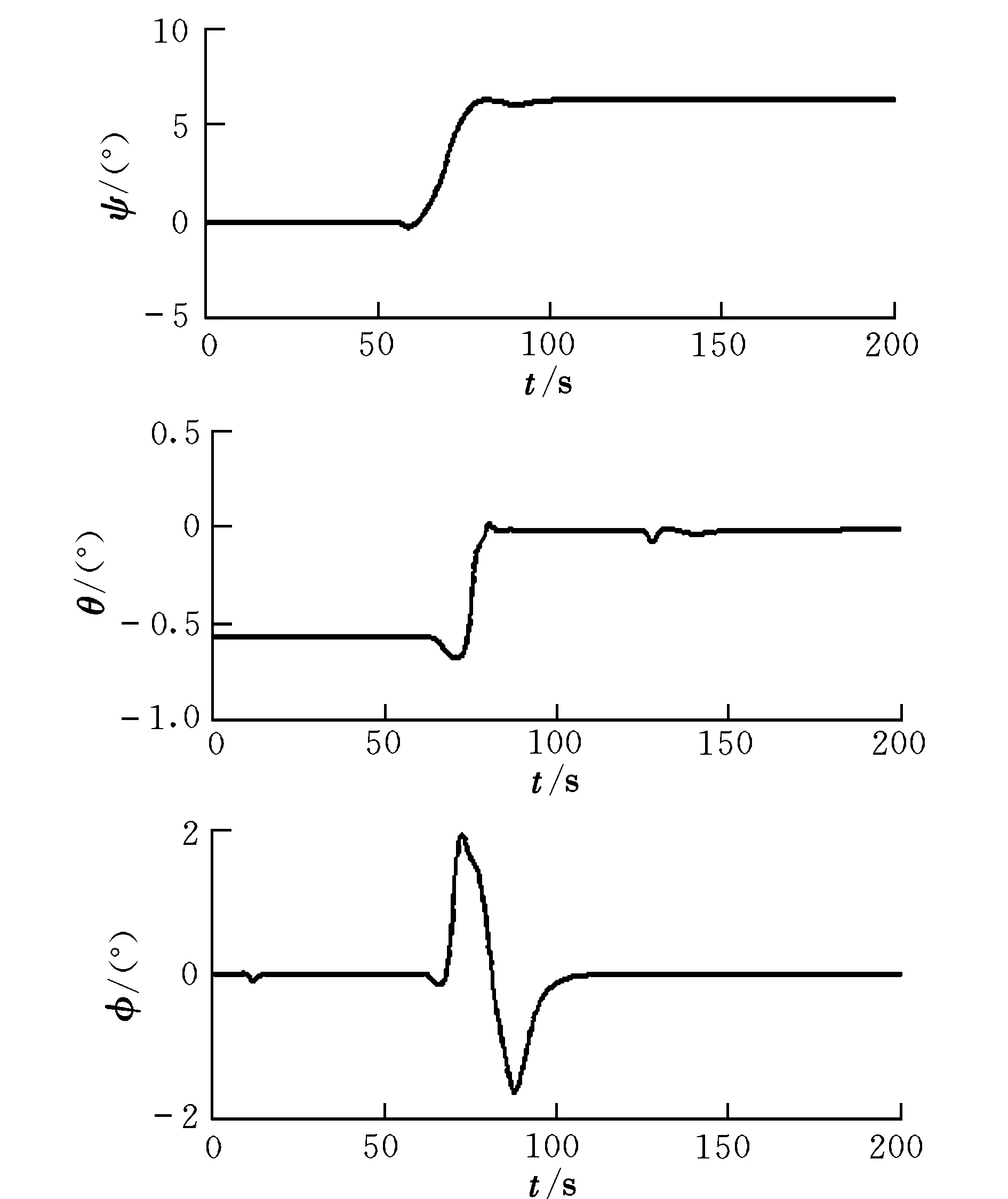
图5 UCAV飞行姿态参数Fig.5 Flight attitude parameters of UCAV
5 结束语
针对无人机自主空中加油近距机动阶段不可避免地要受到加油机尾流的影响,本文基于等效气动效应法研究了UCAV动力学模型,并引入Burnham尾流模型,分析了加油机尾流速度的合成原理,通过计算力系数和力矩系数建立了UCAV动力学方程。通过仿真,验证了此方法可以为控制律设计建立相对真实的尾流环境。设计的位置跟踪器能够有效抑制尾流扰动带来的影响,实现相对位置的保持。此外,由于空中加油环境的不确定性,在以后的研究中将重点研究随机扰动对空中加油性能的影响,使仿真环境更加贴近实际。
[1] Nalepka J P,Hinchman J L.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.San Francisco:AIAA,2005:6005-6013.
[2] 董新民,徐跃鉴,陈博.自动空中加油技术研究进展与关键问题[J].空军工程大学学报(自然科学版),2008,9(6):1-5.
[3] 郭军,董新民,王龙,等.自主空中加油变质量无人机建模与控制[J].飞行力学,2011,29(6):36-40.
[4] Atilla Dogan,Eunyoung Kim.Control and simulation of relative motion for aerial refueling in racetrack maneuvers[J].Journal of Guidance,Control,and Dynamics,2007,30(5):1551-1557.
[5] Atilla Dogan,Shinya Sato.Flight control and simulation for aerial refueling[C]//AIAA Guidance,Navigation,and Control Conference and Exhibit.San Francisco,2005:1-15.
[6] Hansen J,Murray J,Campos N.The NASA Dryden AAR project:a flight test approach to an aerial refueling system[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Providence,RI,2004:233-241.
[7] Bennington M A,Visser K D.Aerial refueling implications for commercial aviation[J].AIAA Journal of Aircraft,2005,42(5):366-375.
[8] Waishek J,Dogan A,Blake W.Derivation of the dynamics equations of receiver aircraft in aerial refueling[J].Journal of Guidance, Control,and Dynamics,2009,32(2):585-597.
[9] 陈博,董新民,徐跃鉴,等.加油机尾流场建模与仿真分析[J].飞行力学,2007,25(4):73-76.
Aerialrefuelingmodelingandclose-distancemaneuveringcontrollawdesignforUCAV
DOU He-feng, DONG Xin-min, XUE Jian-ping, WANG Hai-tao
(Aeronautics and Astronautics Engineering College, Air Force Engineering University, Xi’an 710038, China)
Considering the difficulty to maintain the relative position of tanker in aerial refueling due to the interference of the tanker wake, a dynamic model for UCAV is set up and the optimal control law of close-distance maneuvering is designed on the basis of the equivalent aerodynamic effect method. The influence of the tanker wake is considered as the average wind speed and wind gradient, the induced force coefficient and induced moment coefficient acting on UCAV is calculated, a receiver aircraft model including wake disturbance is established. The optimal control of close-distance maneuvering is designed with the integral of position tracking errors in extended state and on the basis of weighting quadratic performance indexes. The simulation results show that the model can truly reflect the effect of tanker wake on the receiver and the accurate tracking of relative position can be realized via the close distance maneuvering control law.
autonomous aerial refueling; wake modeling; close-distance maneuvering; optimal control
V249.1
A
1002-0853(2013)04-0326-05
2012-12-04;
2013-04-27; < class="emphasis_bold">网络出版时间
时间:2013-06-06 12:25
窦和锋(1988-), 男, 山东郓城人,硕士研究生,研究方向为飞行器控制理论及应用。
(编辑:方春玲)
