空中加油变质量建模与干扰补偿控制
2013-11-04刘娇龙薛建平董新民王海涛代峰
刘娇龙, 薛建平, 董新民, 王海涛, 代峰
(1.空军工程大学 航空航天工程学院, 陕西 西安 710038; 2.中国人民解放军驻212厂军代表室, 陕西 宝鸡 721006)
空中加油变质量建模与干扰补偿控制
刘娇龙1, 薛建平1, 董新民1, 王海涛1, 代峰2
(1.空军工程大学 航空航天工程学院, 陕西 西安 710038; 2.中国人民解放军驻212厂军代表室, 陕西 宝鸡 721006)
为抑制空中加油给飞机带来的变质量影响,将质量的变化等效为对飞机的干扰力和干扰力矩,建立了变质量飞机的一般动力学模型,并经过小扰动线性化得到飞机带干扰的纵向状态方程。采用比例积分观测器(PIO)对干扰进行观测,基于观测值设计了补偿控制器以实现对变质量干扰的抑制。以受油机为例进行计算机仿真,结果表明,该模型有效地反映了变质量受油机的动力学特性,干扰补偿控制器能够实现对变质量受油机的精确控制。
空中加油; 变质量; 比例积分观测器; 干扰补偿
0 引言
空中加油能在减少飞机起飞/着陆次数的前提下,有效增大航程、续航时间和有效载荷,极大地提高了航空兵部队的作战能力,在现代战争中具有非常重要的作用[1]。与常规飞行状态不同的是,在进行空中加油时,受油机动力学特性会受到加油机尾流和受油机质量快速变化的显著影响。对于加油机的尾流影响,国内外已经进行了广泛的研究,而对于燃油传输带来的质量快速变化影响研究相对较少[2-3]。在建立飞机动力学方程时,如果在60 s的时间内飞机质量变化在5%以内,则可认为飞机质量是恒定不变的,满足质量恒定假设[4]。然而对于进行空中加油的小型受油机,一般难以满足此假设。文献[5]通过仿真分析也指出,燃油传输带来的力和力矩特性变化会显著地影响飞机动力学特性,使得空中加油过程变得更加困难和复杂,如果不进行相应的控制,受油机将逐渐远离加油机使加油任务失败。因此,进行空中加油变质量飞机建模,分析变质量带来的影响并进行相应的控制律设计是十分必要的。
文献[5-6]根据加油前后动量、动量矩变化以及动量定理和动量矩定理推导了飞机的动力学方程,精确地反映了变质量带来的影响。但是,这样的模型将变质量影响包含在动力学方程中,在进行控制律设计时不便单独针对变质量影响进行控制。同时,该方法建立的非线性方程组极其复杂,这种模型便于数值仿真,但不适合运用现代控制理论的线性分析和综合方法进行控制律设计[7]。为此,本文利用分离法[8]将质量的变化转化为干扰力和干扰力矩,建立了变质量飞机的一般动力学模型。针对线性化纵向状态方程,设计了基于比例积分观测器(Proportional Integral Observer,PIO)的干扰补偿控制器,以实现对变质量干扰的抑制,从而精确控制受油机空速与姿态,保证空中加油任务的顺利完成。
1 变质量飞机建模
对于变质量质点系,不能直接利用动力学经典理论,需要采用变质量质点理论来建立飞行器的动力学模型[9]。
1.1 变质量力学基本方程
对于一个质量随时间变化的质点,有变质量质点基本方程:
mdV/dt=F+Vrdm/dt
(1)
式中,m为质点的质量;V为质点绝对速度;Vr为质点中变化质量部分相对于质点的相对速度;F为质点受到的合外力。
当系统内部有相对运动时,一般质心运动方程和绕质心运动方程为:
(2)

(3)
(4)
(5)
(6)
(7)
式中,ρ为系统质心到质点的矢量。
可见,任意一个变质量系统在t瞬时的质心运动方程和绕质心运动方程能用刚化原理[9]来表示:这个刚体的质量等于系统在瞬时的质量,而它所受的力除了真实的外力和力矩外,还要加两个附加力和两个附加力矩。
1.2 变质量飞机动力学建模
基于变质量力学基本原理,为分析方便,将飞机分为两部分:一是固定质量部分;二是变质量部分。前者包括飞机加油前的所有装置(包括剩余燃油),将此部分视为质量固定的刚体;后者指新加入油箱中的燃油,将其视为质点。飞机的质量变化主要由油箱中加入燃油而引起。对于正在进行燃油传输的飞机,在惯性坐标系下其质心运动方程和绕质心转动方程分别为:
md2rc,m/dt2=Fs+ΔF
(8)
IdωT/dt+ωT×(IωT)=Mc,m+ΔM
(9)
式中,rc,m为飞机的质心在惯性坐标系下的矢径;Fs为飞机所受到的合外力,包括发动机推力、飞机气动力和重力;ωT为飞机相对于惯性坐标系转动速度;Mc,m为飞机所受到的合外力矩。根据刚化原理,ΔF和ΔM为燃油传输时带来的附加力和附加力矩,即:
(10)
(11)
而对于常规飞机动力学模型,其质心运动方程和绕质心转动方程为:
md2rc,m/dt2=Fs
(12)
IdωT/dt+ωT×(IωT)=Mc,m
(13)
对比空中加油飞机与常规飞机的动力学模型可以看出,燃油的传输带来干扰力ΔF和干扰力矩ΔM,从而对飞机的动力学模型产生影响。ΔF和ΔM与油箱的位置、燃油传输的速率有关系。
1.3 油量变化特性建模
飞机进行空中加油时,燃油相对于飞机以Vr的速度进入油箱,将油箱简化为质点,其质量变化特性为:
(14)
式中,k为燃油传输率,对于受油机,k为正;Mfull为油箱加满油时的质量;Tfull为油箱加满油所需要的时间。
2 纵向干扰补偿控制器设计
油箱对称安装、燃油对称等量传输的飞机,空中加油带来的干扰力和干扰力矩主要存在于纵向通道上[3]。对变质量动力学方程进行小扰动线性化,得到带变质量干扰的飞机纵向状态方程为:
(15)

针对干扰力和干扰力矩带来的影响,本文采用基于PIO的干扰补偿控制器来实现干扰的抑制,控制结构如图1所示。首先,利用PIO对未知干扰进行观测得到观测值f,然后利用f解算得到控制补偿量ud,将其叠加在原控制律输入uc中,用于对干扰进行补偿,从而实现对变质量飞机的补偿控制。
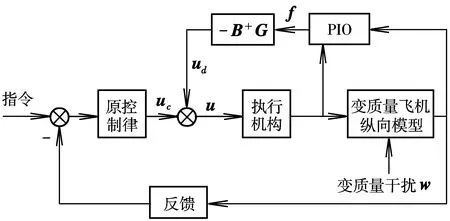
图1 变质量飞机纵向姿态控制律结构图Fig.1 Longitude attitude control law of variable mass aircraft
2.1 比例积分观测器
飞机线性化状态方程式(15)中,由于系统中含有未知的干扰输入w,Luenberger观测器不能得到状态变量的正确估计,更无法观测未知干扰输入。PIO是针对系统存在未知输入干扰时的观测器,它不仅能够实现状态变量的观测,也可以对未知干扰进行观测[10],PIO结构框图见图2。PIO是在原Luenberger观测器中加入积分项:
(16)
式中,f为引入的积分项,用于观测干扰量w;KP,KI为PIO的比例和积分增益矩阵。将式(16)整理为状态空间形式:
(17)
(18)
可以证明,当(A,C)可观测,且满足:
式中,rn,rm分别为系统状态和干扰输入的维数。对任意初始状态,e都收敛到0。
(19)
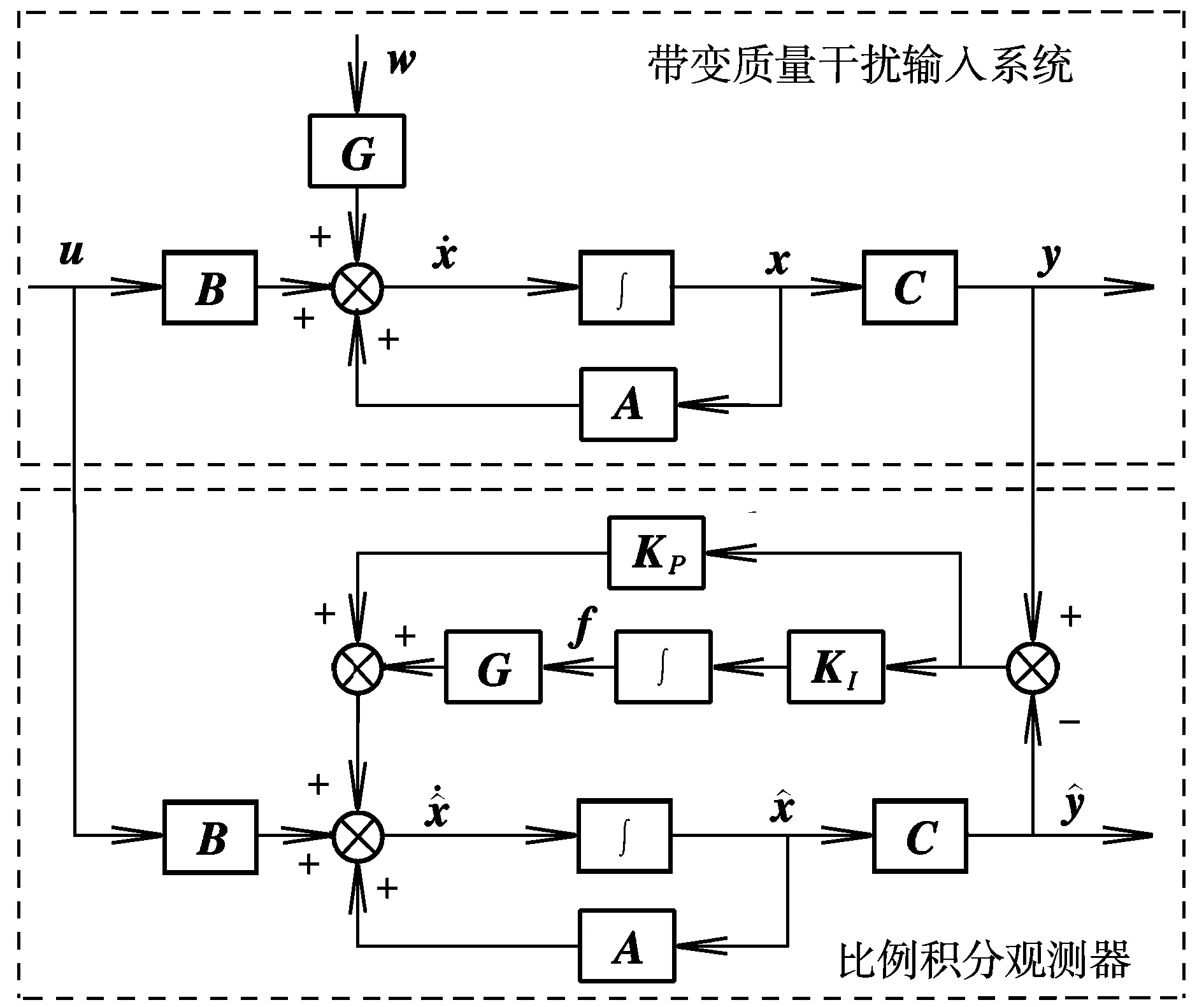
图2 比例积分观测器结构框图Fig.2 The frame of PIO
2.2 干扰补偿控制器
取控制输入为:
u=uc+ud
(20)
式中,ud为用来实现抑制干扰的补偿项,使变质量对飞机的影响降低到最小;uc为飞机原有的控制律。由式(15)可见,当Bu+Gw=0时,即:
ud=-B+Gw=-B+Gf
(21)
此时可使干扰对系统的影响最小。B+为B的广义逆。需要注意,对于方程Bu=-Gw不一定相容,所以解-B+Gf可能只是最小二乘解,即只能使干扰对系统的影响降低至最小,而不是完全消除。
3 仿真分析
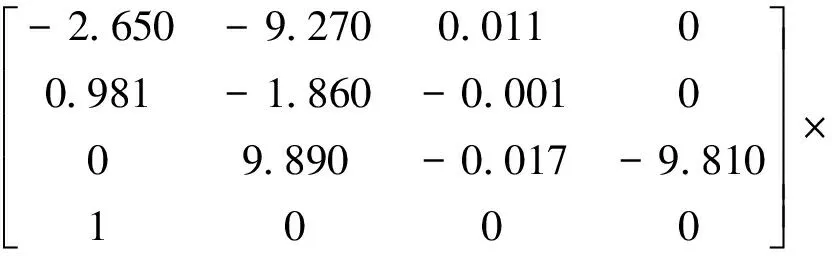
采用文献[7]中的Do328飞机作为受油机模型,在Simulink环境下进行仿真,分析空中加油过程中变质量对受油机的影响,并验证所设计控制律的性能。受油机以144 m/s的速度在1 900 m高空飞行,受油前总质量Mp=10 500 kg,惯量积Iy=158 000

加入变质量干扰后,受油机的纵向状态方程为:
3.1 变质量影响分析
对受油机进行变质量干扰下的仿真,结果如图3所示。从仿真结果可以看出,在受油过程中,受油机俯仰角、空速响应剧烈。俯仰角出现飘摆现象,而空速不断增加,这主要是因为干扰导致飞机高度下降而引起。可见,变质量将导致受油机相对于加油机位置会出现较大偏移,若没有相应控制输入的调整,在加油不久后就会逐渐脱离受油位置。
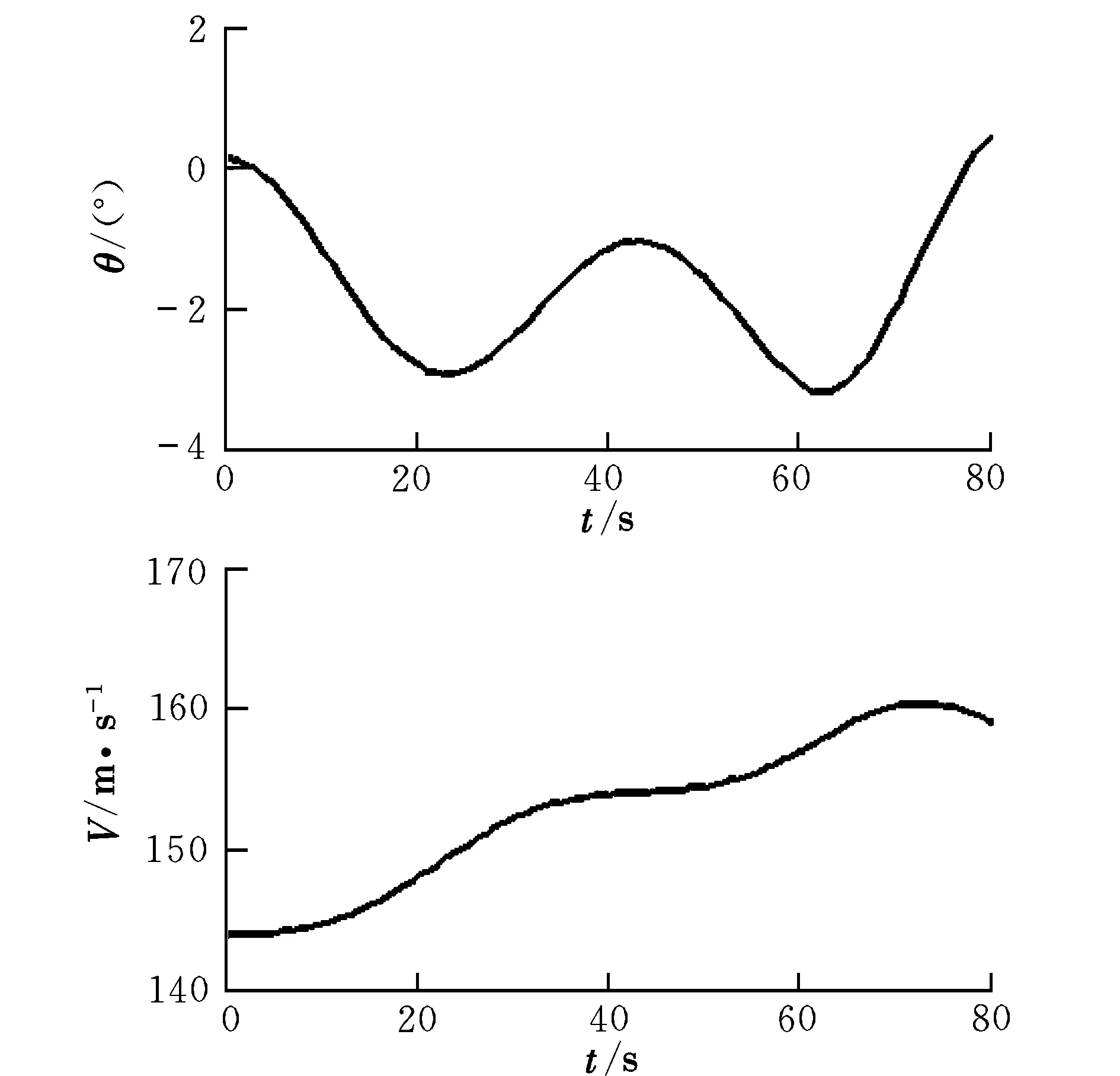
图3 空中加油受油机变质量响应Fig.3 Variable mass response of receiver in aerial refueling
3.2PIO观测器验证
加入PIO进行仿真,得到干扰观测值与真实值之间的对比关系如图4所示。由图可见,PIO能够精确地观测干扰力及干扰力矩。
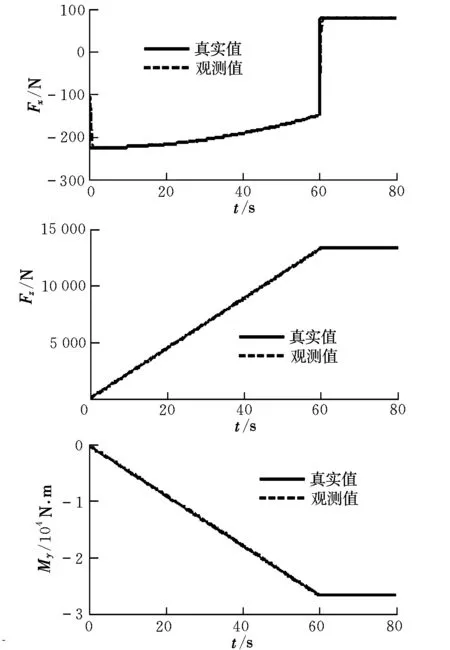
图4 干扰真实值与PIO观测值对比Fig.4 Comparison of actual value and observed value
其中PIO配置的极点为[-4.5 -5.0 -5.5 -6.0 -6.5 -7.0 -7.5],PIO的增益阵为:
3.3 受油机控制律仿真验证
为验证补偿控制对变质量干扰的抑制作用,采用全状态反馈作为受油机原有控制律,对比有、无PIO补偿控制的受油机响应,得到仿真结果如图5和图6所示。
由仿真结果可见,发动机推力补偿信号是正推力,这是用来消除质量增加带来的推力不足的影响;而升降舵偏角补偿量为负的偏角,用以产生正的俯仰力矩,抵消变质量带来的负的干扰力矩。加入干扰抑制补偿的飞机俯仰角基本不变,而仅在原控制律下,飞机俯仰角无法保持稳定。对比空速响应曲线,可发现补偿信号较好地抑制了干扰带来的空速影响。仿真结果验证了该补偿控制器的有效性。
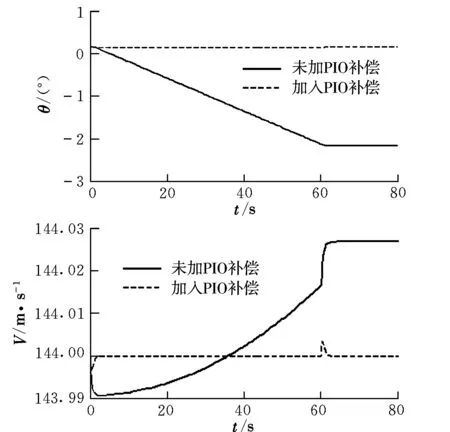
图5 俯仰角及空速响应对比曲线Fig.5 Comparison of pitch angle and airspeed response
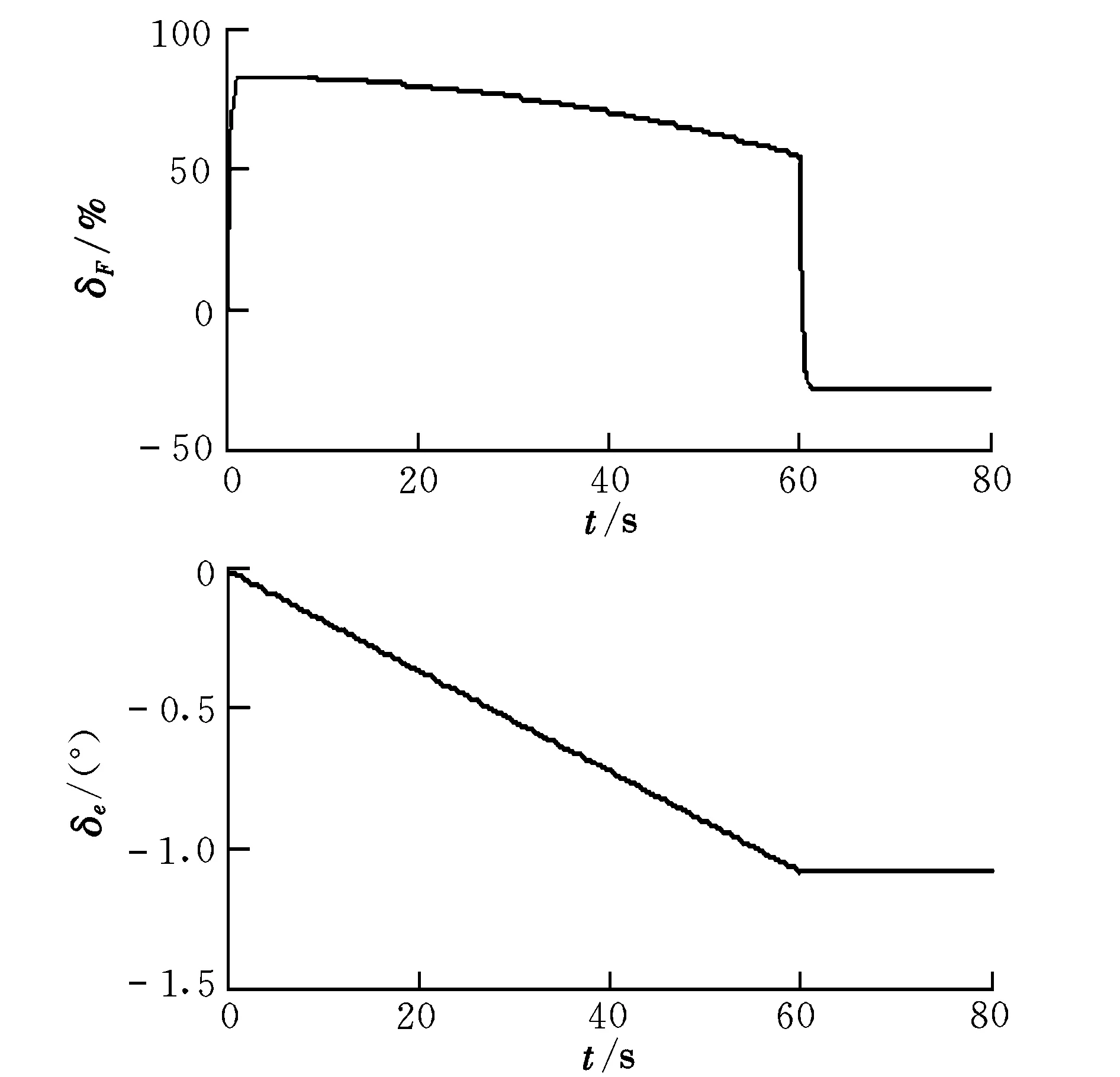
图6 升降舵偏角与推力位置的补偿指令Fig.6 Compensation signal of elevator angle and engine thrust
4 结束语
针对空中加油变质量干扰问题,将变质量影响等效为对飞机的干扰力和干扰力矩,得到变质量飞机一般动力学模型。在飞机纵向线性小扰动模型的基础上,设计了基于PIO的补偿控制器,以抑制变质量带来的干扰。仿真结果表明:质量变化对受油机造成较大影响;PIO能够精确观测干扰量;在原控制律的基础上对其进行了干扰补偿控制,能够在受油机变质量的情况下有效稳定受油机的纵向状态。基于PIO的补偿控制器不仅适用于空中加油过程中对变质量飞机的控制,同样也适用于其他带干扰输入系统的补偿控制。但该方法局限于线性化模型,若要进行非线性观测与控制还需要作进一步研究。
[1] 曹永刚,赵鲁宁,李察.某型飞机加装空中受油状态改进电传系统研究[J].飞机设计,2008,28(4):41-47.
[2] Mao W,Eke F O.A survey of the dynamics and control of aircraft during aerial refueling[J].Nonlinear Dynamics and Systems Theory,2008,8(4):375-388.
[3] 郭军,董新民,王龙,等.自主空中加油变质量无人机建模与控制[J].飞行力学,2011,29(6):36-40.
[4] Jan Roskam.Airplane flight dynamics and automatic flight controls[M].Kansas:Design,Analysis and Research Corporation,2001:4-5.
[5] Mao W.Effect of mass variation on the dynamics of receiver aircraft during aerial refueling[D].California:Mechanical and Aeronautical Engineering University of California,2008.
[6] Jayme Waishek,Atilla Dogan.Derivation of the dynamics equations of receiver aircraft in aerial refueling[J].Journal of Guidance,Control,and Dynamics,2009,32(2):585-597.
[7] 鲁道夫·布鲁克豪斯.飞行控制[M].第1版.金长江,译.北京:国防工业出版社,1999:152,568-604.
[8] 杨晓科,杨凌宇,张晶,等.变重量/重心飞机建模及姿态控制律设计[J].北京航空航天大学学报,2011,37(1):54-57,62.
[9] 胡小平,吴美平,王海丽.导弹力学基础[M].第1版.长沙:国防科学技术大学出版社,2006:57-63.
[10] 李振营,沈毅,胡恒章.具有未知输入干扰的观测器设计[J].航空学报,2000,21(5):471-473.
Modelingofaircraftwithvariablemassinaerialrefuelinganddesignofdisturbancecompensationcontroller
LIU Jiao-long1, XUE Jian-ping1, DONG Xin-min1, WANG Hai-tao1, DAI Feng2
(1.Aeronautics and Astronautics Engineering College, Air Force Engineering University, Xi’an 710038, China; 2.In 212 Factories Military Representative Office of the PLA, Baoji 721006, China)
In order to restrain the influence on aircraft caused by the variable mass in aerial refueling, the general dynamic equations with variable mass are derived by equalizing mass variation to the disturbance forces and moments to the aircraft, and then the state equation of longitudinal channel is achieved by small disturbance linearization. The proportional integral observer(PIO) is used to estimate the disturbance forces and moments, which are used to compute the disturbance compensation and control the aircraft. The computer simulink of an example of receiver in aerial refueling demonstrates that the model efficiently reflects the dynamic characteristics of the receiver with variable mass, and the controller can control the receiver accurately.
aerial refueling; variable mass; proportional integral observer; disturbance compensation
V249.1
A
1002-0853(2013)04-0321-05
2012-11-26;
2013-04-01; < class="emphasis_bold">网络出版时间
时间:2013-06-06 11:29
刘娇龙(1988-), 男, 四川安岳人,硕士研究生,研究方向为飞行器控制理论及应用。
(编辑:方春玲)
