一种三驱动六连杆夹具的设计与分析
2013-11-04陈述平程凡强朱云鹏马明旭李树军
陈述平,程凡强,朱云鹏,马明旭,李树军
(东北大学 机械工程与自动化学院,辽宁 沈阳 110004)
1 引言
目前,国内外壁板板材的成形方法主要有单点渐进成形、多点渐进成形、压弯成形、滚弯成形、拉伸成形和喷丸成型等。工件的固定和运动主要有两种方式:一种是固定压边式,另一种是靠操作工人凭借经验手持工件人工调整[1]。前一种方式主要用于工件在加工过程中保持固定状态情况;后一种方式主要用于工件在加工过程中需要进行移动和转动情况,因目前尚无能够夹持工件作自动移动和转动的工装夹具设备,操作工人只能凭借经验手持工件采用人工调整方法[2](典型例子如压弯成形和不规则形状剪板成形)。
人工干预工件调整存在工作效率低、调整准确性差和操作危险性高的缺陷。对于人工干预危险性高、误差大和效率低的场合,例如板材压弯成形和不规则剪板成形等,人工干预工件调整已越来越不能适应加工要求。利用数控技术实现工件的移动和转动自动控制是今后板材成形方法的趋势[3],而要实现数控技术自动控制必须有与之配套的加工工件夹具。
2 三驱动六连杆夹具结构设计
三驱动六连杆夹具包括:曲柄侧机构、连杆侧机构、工件和机架。具体结构,如图1 所示。
曲柄侧机构和连杆侧机构通过左、右夹头与工件相连。当滑块工作台静止时,六杆机构相当于四杆机构,工件充当四杆机构中的连架杆[4]。为模仿人手腕动作,保证夹头在工作时具备各个方向的自由度,本设计在夹头和曲柄/连杆间安装了压缩弹簧[5]。夹具整体通过夹具左、右固定座固定于需要安装该夹具的设备的工作台上,如压弯成形机和不规则剪板成形机等。
3 三驱动六连杆夹具运动分析
一种三驱动六连杆夹具是由两个Ⅱ级干组组成的六杆机构,通过式(1)计算可得,该杆组具备三个自由度[6]。通过三个驱动电机分别控制三个自由度。

一种三驱动六连杆夹具的机构简图,如图2 所示。
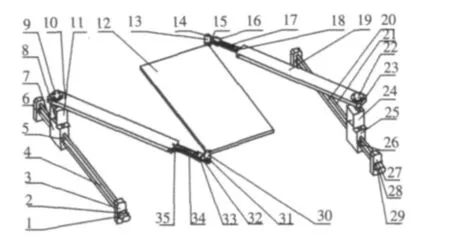
图1 三驱动六连杆夹具整体结构示意图Fig.1 The Mechanical Schematic Diagram of the Six-bar Fixture with three Drives
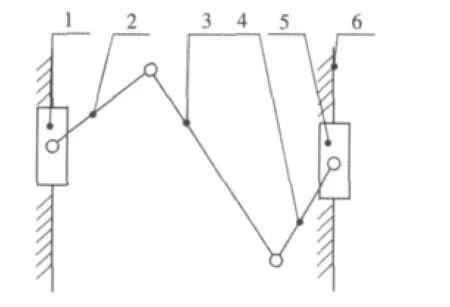
图2 三驱动六连杆夹具机构简图Fig.2 The Kinematic Sketch of the Six-bar Fixture with three Drives
在确定夹具的具体结构后,利用三维建模软件对该夹具进行了建模和运动效果模拟[7],如图3 所示。
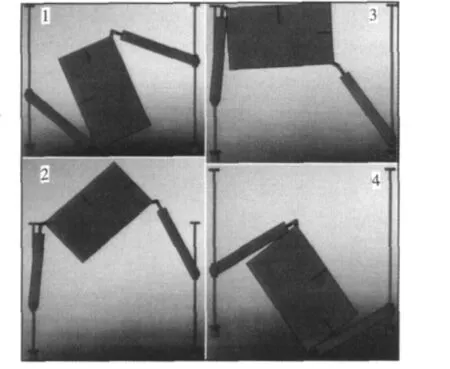
图3 通过软件进行运动效果模拟Fig.3 The Motional Simulation by Software
当两侧滑块静止时,六杆机构相当于四杆机构。曲柄旋转,带动工件(连架杆)做平面运动。当工件将要偏出压头工作范围时或四杆机构死点将要出现时,协调移动两侧滑块可有效避免上述情况的发生[8]。两侧滑块同时前后移动并伴随压头左右移动,可对工件做平面位移补偿。由图3 中标记容易看出,夹具能够使工件旋转180°,即可实现工件加工过程中任意位置,任意角度的成型操作。
4 结论
一种三驱动六连杆夹具可以调整壁板的前后移动和转动,同时可根据加工要求进行位置补偿操作;用其取代人工调整,可避免工人因操作不当导致的伤害;夹具可广泛应用于多种金属成型加工,如剪板机、压弯机、弯曲成形机及冲压机床等。在数控系统的协助下,可使加工设备连续精确运行,加工效率高,设备操作危险程度低;通过三维软件对其进行了运动效果模拟,一种三驱动六连杆夹具能够达到角度调节及位移补偿的预期要求,但还需要进一步进行优化设计。为达到工件旋转角度最大,同时位移补偿最小的最优情况,讨论各连杆最优长度是该夹具下一步研究的主要工作。
[1]赵长喜,李继霞.航天器整体壁板结构制造技术[J].航天制造技术,2006,8(10):44-49.(Zhao Chang-xi,Li Ji-xia.Structure manufacturing technology of integral panel used in spacecraft[J].Aerospace Manufacturing Technology,2006,8(10):44-49.)
[2]欧赵福,王兴波,何英武.数控加工半实物仿真系统的研究与开发[J].现代制造工程,2007(9):44-48.(Ou Zhao-fu,Wang Xing-bo,He Ying-wu.Study and development of the half practicality simulation system for numerically controlled machining[J].Modern Manufacturing Engineering,2007(9):44-48.)
[3]莫健华,韩飞.金属板材数字化渐进成型技术研究现状[J].中国机械工程,2008,19(4):491-499.(MoJian-hua,HanFei.State of the Arts and Latest Researchon Incremental Sheet NCF or ming Technology[J].Chinese Mechanical Engineering,2008,19(4):491-499.)
[4]李树军.机械原理[M].沈阳:东北大学出版社,2009.(Li Shu-jun.Mechanical Principles[M].Shenyang:Northeastern University Press,2009.)
[5]孙志礼,马星国,黄秋波,等.机械设计[M].沈阳:东北大学出版社,2008.(SunZhi-li,MaXing-guo,HuangQiu-bo.Machine design[M].Shenyang:Northeastern University Press,2008.)
[6]孙恒,陈作模,葛文杰.机械原理[M].第7 版.北京:高等教育出版社,2006.(Sun Heng,Chen Zuo-mo,Ge Wen-jie.Mechanical Principles[M].Beijing:Higher Education Press,2006.)
[7]赵秋玲,吕瑛波.SolidWorks 2009 机械设计行业应用实践[M].北京:机械工业出版社,2010.(Zhao Qiu-ling,Lv Ying-bo.Applications of Solid Works 2009 in mechanical design industry[M].Beijing:Mechanical Industry Press,2010.)
[8]彭世警,管祥华,李滨城.六杆推送机构的运动学及动力学分析[J].农业装备与车辆工程,2011,28(1):40-44.(Peng Shi-jing,Guan Xiang-hua,Li Bin-cheng.Kinematics and dynamics analysis of six-bar push mechanism[J].Agricultural Equipment&Vehicle Engineering,2011,28(1):40-44.)