基于语义层次组成的ST-MRF交通事故检测算法*
2013-11-04周君程琳
周 君 程 琳
(东南大学交通学院 南京 210096)
0 引言
交通事件检测在国外开展的较早,从20世纪60年代开始,国外的一些学者就相继提出了若干的交通事故自动检测算法。根据算法如何利用检测数据,这些算法可以分为5类:比较算法、统计算法、基于时间序列与滤波的算法、基于交通流理论模型的算法和人工智能及其它先进算法[1]。国内最早对事故检测算法的研究是1994年邓卫等引进突变理论,提出了在确认交通拥挤出现的同时,判别交通拥挤类型的算法[2]。之后的事故检测算法的研究趋向于改进和发展基于人工智能、信息技术、统计学习等先进技术的事故检测算法。目前大部分交通事故检测算法没有考虑车辆相互遮挡的影响,导致在交通量比较大的情况下,算法运行结果比较差,为了解决这一问题,提出了基于语义层次组成的时空马尔可夫随机场(简称STMRF)交通事故检测算法。该技术框架使用STMRF模型实现车辆跟踪,将图像序列转化为车辆标号场序列,该模型还克服了遮挡对跟踪的影响。通过车辆跟踪的结果得到车辆的目标地图和运动矢量,进而获得交通流基本参数,然后结合从安装在道路上的检测器获取的交通流数据,采用语义层次算法对交通事故进行检测。这种事故检测算法与以前的算法有所不同,它需要2组数据,1组数据来源于视频检测的车辆跟踪结果,另1组数据来源于道路检测器所检测到的数据。该算法能在交通比较拥挤且车辆出现相互遮挡的情况下,准确检测到交通事件(如碰撞、追尾、超速、车辆抛锚和鲁莽驾驶等),对缓解交通拥挤和减少交通事故有重要的意义。
1 基于ST-MRF的车辆跟踪得出车辆的目标地图和运动矢量
1.1 ST-MRF理论知识[3]
x={x1,x2,L,xN}表示基于指标X的1 组随机变量,其中每1个随机变量Xi取集合L 中的1个值xi,则随机变量组X 被称为随机场。Xi=xi表示随机变量Xi取值xi的事件;相应地,(Xl=xl,L,XN=xN)用来表示联合事件,简化为X=x,其中,x={x1,x2,L,xN}成为随机场X的1个构造。马尔可夫随机场有效地描述了随机场X 局部特性,表达了当前像素点的标记仅与其邻域的像素有相互作用,而与其它位置的像素标记情况无关。
1.2 获得目标地图与运动矢量
把1个720×640的图像分割成90×80的块,即每个块由8×8的像素组成。在算法中,把1个块对应于ST-MRF 中的1 个场景。即把每个块和1个车辆联系起来,也就是给每个块赋1个对应的车的标号。
本文采用自适应车辆跟踪的算法去确定1个初始标号分布。自适应的车辆跟踪算法步骤如下所示。
1)初始化及新车辆标号的产生。建立1 个研究区域的背景图像,在算法中,设置检测槽线,检测槽线组成1个矩形,在矩形内的车辆能被检测到,超出矩形的车辆就不能检测。这样做的目的是为了避免对向车辆被检测,妨碍检测结果。并在槽线上检测前景与背景灰度图像的变化,用于判断是否进入车辆。在槽线块上,每1个块的当前灰度和背景灰度的差值一直在被检测。当这个差值大于一定的阈值时,算法就判断检测到1辆新车,并产生1个新的标号,这个标号赋予给目标块。如果新的目标块与早前检测到的目标块部分重叠,这时把以前检测到的目标块的标号更新为新的标号。在这里,仅仅只有块才具有来自背景图像的不同纹理作为车辆区域被标号,但是这些块随着背景图像一起具有相同的纹理,而不能给其他车辆区域进行标号。
2)估计目标运动矢量。当车辆区域离开检测槽线时,算法沿着时间序列自动更新车辆的形状。对于这个更新,算法在车辆区域的块中估计运动矢量。在每1个块上,运用块的匹配方法估计每1个目标块在时间t和t+1时的运动矢量。即块在时间t的坐标值为(x(t),y(t)),在时间t+1的坐标值为:
(x(t+1),y(t+1))=(x(t)+u(t),y(t)+v(t)),该公式通过式(1)估计所得。其中G(x,y,t)是像素(x,y)在时间t的灰度强度。大概10个目标块属于1个对象。这个对象的运动矢量被目标块中一些高频运动向量所代表。

3)更新目标块。在具有代表性的运动矢量的基础上,在下1个图像中改变现有的目标区域,在新的图像中,赋予块相对应的标号。如果在下1个目标块中,背景图像在强度上小于最初给定的值,不要定义被检测到的块为目标块,如果大于则相反。
4)确定目标地图。在特殊情况下,多个对象同时通过槽线可以被认为是1个单独的对象。为了划分这些对象,需要检查连通性及目标块的运动矢量分布。
2 数据处理
未经去噪处理的数据具有很强的随机性,这主要是由两方面造成的:一方面车辆的运行状态本身具有很强的随机性,造成交通流参数的持续波动;另一方面数据采集其实是1个复杂的测量过程,会受到各方面的干扰,产生随机测量误差。在检测算法建立与使用的过程中使用有较强噪声污染的数据会严重影响算法的性能,因此需要先针对原始数据中的噪声污染进行预处理。关于小波分析的基本理论可以参见相关专著[2],本文仅对小波去噪的步骤作简单说明。
对于1个含有噪声的原始信号模型[3]:

式中:si为原始含噪信号;ei为噪声;δ为噪声水平。小波去噪一般包括如下步骤。
1)对原始数据作小波分解变化。选定小波函数和小波分解的层次n,对原始信号S 进行小波分解后得到n 个低频系数序列(cA1,cAn-1,cAn)和n个高频系数序列(cD1,cDn-1,cDn)。
2)对小波系数作门限阈值处理。即选择适当的阈值,只保留(cD1,cDn-1,cDn)中模大于阈值的小波系数,其它置为零,从而达到去噪的效果。
3)小波重构,获得处理后数据。即根据低频系数An和上一步处理后得到的高频小波系数进行小波系数的重构,即可得到去噪后的数据。
3 基于语义层次组成的ST-MRF的交通事故检测算法
3.1 语义层次定义
语义,反映图像中包含的信息,可以是图像中具体包含的事物、背景、事物的空间关系等等。为了明确图像语义所处的层次,Eakins[7]提出了语义层次模型,该模型将语义层次划分为3个层次,分别为图像底层特征层、对象层以及语义概念层。文章简化Eakins的语义层次模型并结合交通事件检测指标提出坐标层、行为层和事件层3层语义结构算法对路段上的碰撞、追尾、超速、车辆抛锚和鲁莽驾驶等交通事件进行检测,如图1所示。
3.2 语义层次结构
1)第1层。坐标类层。在该层,通过坐标类函数语句获得来源于基于ST-MRF的跟踪结果——目标地图和运动矢量,使用图像传感器从坐标和运动矢量中提取交通量、平均车速、加减速度和行驶轨道等参数。目标地图和运动矢量算法过程见文章第1节内容。提取的坐标类信息包括以下函数语句:

2)第2层。行为类层。在该层,通过行为类函数语句获得每辆车的行为信息。行为类函数包括的信息有:停车、减速、间距、变换车道等。提取的行为类信息包括以下函数语句:

3)第3层。事件类层。在该层,通过事件类函数语句可以获得交通事件信息。如交通事故(碰撞、追尾、超速、车辆抛锚和鲁莽驾驶等)和交通拥挤。该层只由图像信息构成。当交通出现严重遮挡现象时,很难从二维图像本身观察到交通事故,所以必须从下游检测器获得的数据经小波处理得到的交通流参数经整理成的流量类函数一起判断事件发生[4]。
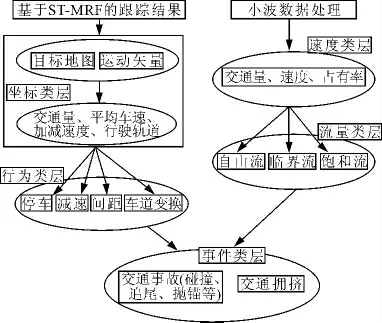
图1 语义层次结构流程图Fig.1 The structure flow chart of semantic hierarchy
3.3 基于语义层次的事件检测算法分析
3.3.1 单个车辆的事件行为分析[5-7]
本节事件行为研究只考虑单个车辆的行为,而不考虑车辆之间的联系,根据车辆单个独立的行为来检测事件。
1)坐标类运算符。为了从跟踪结果中提取出单个车辆的坐标,有必要对坐标类运算符进行定义:

2)行为类运算符。通过使用来自坐标类运算符的信息,行为类运算符描述单个车辆的行为如下:

相同行驶状态的车辆轨迹的聚集过程为:每1条轨迹R 分解成一系列n 个离散点rm(1≤m≤n)。每1条估计轨迹R 表示每辆车在时间域里从图像入口到出口的离散轨迹。这些轨迹都投影到2维空间与轨迹聚集的坐标图像中。本文采用k-mean聚集方法。kmin应与车道数相等。聚集估计标号为:C={ck}(1≤k≤kmin),聚集的中心表示为:L
k={lkm}(1≤m≤n,1≤k≤kmin),这表示是第K 种类型行驶状态的车辆轨迹。




3)事件类运算符。事件类运算符对应的交通事件语义描述为:碰撞、追尾、紧急停车。本文采用2种运算符检测交通事件。第1种运算符判断在静止的车辆前面是否有未用的空间。运算符3)表示事故发生后,会有车辆停车,并在停止的车辆前面存在未用的空间。运算符4)表示的状态为:车道上存在静止的车辆,其他车辆为避开静止车辆改道行驶。可以计算出现场更换车道的车辆数。如果此车辆数超过3辆车,可以判定换道行为作为静止车辆的回避行为。值得注意的是我们不考虑静止车辆与换道车辆之间的关系。
3.3.2 多辆车的事件行为分析
尽管前面介绍过的单个车辆的事故行为算法能有效地检测大部分事件,它仍然有出错的时候。错误检测的原因是由于忽视了车辆之间的关系。如图3所示为单个车辆绕道行驶被错误地检测为事件发生。在这些实例中,单个车辆的事件行为算法把正常的交通当成事故,这是因为运算符4)把那些并不是因为避开静止的车辆而更换车道的情况错误地判断为事件发生。在单个车辆的事故行为算法中的运算符4)对事件的检测具有延迟性。这是因为运算符4)中的事件类运算符只有在完成“isStalled”操作输出“正确”命令后才开始计数更换车道的车辆数。另外1种延迟检测就是漏检,如果静止的车辆停在场景之外,就有可能发生漏检。所以有必要对单个车辆的事故行为算法中的运算符4)进行修改。修改后的运算符考虑了静止车辆与其它车辆之间的关系,并且在没有完成“isStalled”操作时就开始计数。修改后的算法称多辆车之间的事件行为算法。
1)行为类运算符。typeOfSpTrajectory(Vi,Vj,t):当车辆为避开车辆Vj改道行驶时输出“变换车道”,否则,输出“正常”。

2)事件类运算符。使用单个车辆的事件行为算法中运算符4),此运算符包括车辆之间的关系和清除检测的延迟时间,通过运算符4)重新定义运算符5)。在运算符5)中,仅仅统计为避开车辆Vj而换道的车辆数。另外,运算符并不是等到车辆停止后才开始计数的。所以,运算符5)在车辆Vj陷入事故中时就立马输出“正确”。
在算法中,重新定义运算符4)为运算符6)。在运算符6)中考虑了车辆之间的关系和聚集轨迹。它描述了在事故中的车辆由于静止而未被检测到的情况,导致后面来车在这个位置为避开陷入事故中的车辆而换道行驶。运算符在某一时间段内统计为避开特殊位置而换道的车辆数。运算符如下所示。

上述运算符函数中b代表事件的发生。
3.4 实验结果分析
本次实验拍摄的视频为2012年9月某高速公路一段,在该路段每天大约有4 万辆车通过。本次实验的目的主要是为了评价单个车辆的事故行为算法和多个车辆事故行为算法的有效性。尽管单个车辆的事故行为算法能够有效地检测一些简单事件,但是对于一些复杂情况下的事件将会漏检。如图3所示,左边有一辆停止的车辆在单个车辆的事故行为算法中没有被检测到,而在多个车辆事故行为算法中被检测到。另外,在单个车辆的事故行为算法中没有考虑车辆之间的关系,这有可能把正常情况当作事件来判断,但是在多个车辆事故行为算法中由于考虑了车辆之间的关系,所以不会被误判。
3.4.1 单个车辆的事故行为算法的结果
在实验期间,总共发生的交通事件是14起,而通过算法检测到的交通事故只有11起。正确率为79%。如图4(a)所示,这是出现静止车辆时所检测到的事件,左边车道上用圆标出的车辆为跟踪区域的边界车辆,单个车辆行为算法未能检测到。
3.4.2 多个车辆事故行为算法的结果
在同样的实验条件下,采多个车辆行为算法来检测交通事故,共检测到12 起,正确率为86%,如图4(b)所示。没有被检测到的2 起事件,一起是因为车辆完全超出了跟踪范围,另一起是因为车辆处于拥挤状态下,而未被检测到。

图2 错检事件Fig 2 Wrong detection
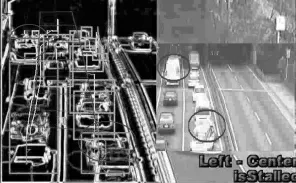
图3 追尾与碰撞事件Fig.3 Rear-end and collision events
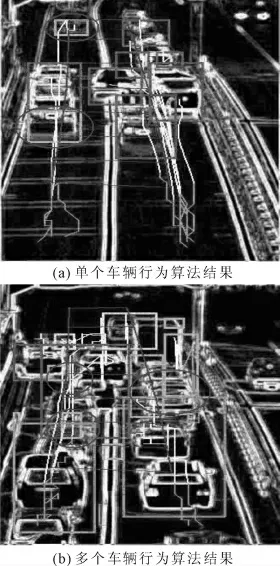
图4 2种算法比较Fig.4 The comparison of two algorithms
4 结论
1)运用ST-MRF模型进行准确的车辆跟踪,且在交通拥挤情况下,获得较准确的交通流数据。
2)运用语义层次算法来对事故检测所需的数据进行分层,层与层之间的关系可以通过运算符调用,这样可以节省计算时间,提高检测速度。
3)算法结合下游检测器检测出的交通流数据,进一步提高检测的准确性,这是因为仅仅采用基于ST-MRF车辆跟踪结果得出的交通流数据进行事件判断,处于车辆跟踪区域的临界处得事件将会漏检。
4)通过实验比较发现,结合下游检测器数据的算法的检测率更高。
[1]Dudek C L,Messer C J.Incident detection on urban freeway[J].Transportation Research Record,1974(495):12-24.
[2]邓 卫,李峻利.高速公路常发性与偶发性交通拥挤的判别[J].东南大学学报,1994,24(2):60-65.
[3]Smith S M,Brady J M.Real-time motion segmentation and shape tracking[J].IEEE Trans.Pattern analysis and machine intelligence,1995(17):340-355.
[4]Eakins J P.Automaitc image content retrieval-are we getting anywhere[C]∥Proc of third Internatinal Conference on Electronic Library and Visual Information Research.De Mont fort University,Milton Keynes:Aslib,1996:123-135.
[5]Besag J.Spatial interactions and the statistical analysis of lattice systems[J].J Roy Statist Soc.,1974:36(2):192-236.
[6]Oikawa Keiko,Kaneko Yukjhiro,Matano Masahiko.Study of abnormal incident detection aimed at automatic wide-area traffic flow monitoring[C]∥World congress on ITS,Washington,D C:IEEE,2002.
[7]Jin X,Ng K,Ng Y,et al.Calibration of Fresim for Singapore expressway using genetic algorithm[J].Journal of Transportation Engineering,1998(124):526.
