粒子群优化算法惯性权重的一种动态调整策略
2013-10-30罗金炎
罗金炎
(闽江学院数学系,福建福州 350108)
粒子群算法(PSO)是Kennedy和Eberhart于1995年提出的一种群体智能演化算法[1],它源于对简化社会模型的模拟.与其他进化寻优算法相类似,PSO算法也是通过个体间的协作与竞争,实现多维空间中最优解的搜索.它首先生成初始种群,即在可行解空间中随机初始化一群粒子,每个粒子都为寻优问题的一个可行解,并用某个函数计算出相应的适应值,以确定是否达到寻优目标.每个粒子将在解空间中运动,并由一个矢量决定其运动方向和位移.通常粒子将追随当前已知的最优位置,并经逐代搜索,最后得到最优解.在每一进化中,粒子将跟踪两个目标位置,一为粒子本身迄今找到的最优解,代表该粒子自身对寻优方向的认知水平;另一为全种群迄今找到的最优解,代表社会认知水平.粒子群算法已被广泛应用于各种优化问题中,如神经网络训练、调度问题、组合优化等.
为改善粒子群算法的搜索性能,Shi和Eberhart对基本PSO算法进行了改进,在粒子的速度进化方程中引入惯性权重 w[2].惯性权重 w控制着粒子运动的惯性,使粒子有扩展搜索空间的趋势和开发新区域的能力.惯性权重w的取值对于保证算法的收敛和最优地权衡搜索与开发极其重要,一般地,较大的权重有利于提高算法的全局开发能力,而较小的权重则能增强算法的局部搜索能力.针对惯性权重w的取值问题,国内外的研究人员进行了大量的工作[3-5],其中线性递减权重法相对简单且收敛速度快,被广泛采用.但是,PSO算法在实际搜索过程中多是高度复杂非线性的,线性递减权重法不能反映实际的优化搜索过程,也有研究人员据此提出了非线性递减法[6-7]和引入其他因素的自适应调整权重法[8]等.本文根据PSO算法惯性权重在优化问题过程中的表现特征,提出了一种基于Logistic模型的动态惯性权重的策略,并与典型的线性递减权重调整策略[3]进行了比较,仿真实验表明:该策略在优化复杂多峰值的问题方面体现了一定的优越性.
1 粒子群优化算法
设第 i个粒子位置为 xi=(xi1,xi2,…,xin)T,其位移为 vi=(vij,vi2,…,vin)T.它迄今搜索到的个体极值为 pi=(pi1,pi2,…,pin)T,而迄今搜索到的种群极值为 pg=(pg1,pg2,…,pgn)T.为使粒子位移变化不致过大,可以设定其上限Vmax,即若 vid> Vmax,则令 vid=Vmax,而若 vid< -Vmax,也令vid=-Vmax.每一次迭代,粒子通过两个极值pi和pg来更新其速度和位置.粒子在解空间内不断跟踪个体极值和邻域极值进行搜索,直到满足迭代停止条件,即达到规定的迭代次数或满足规定的误差标准.
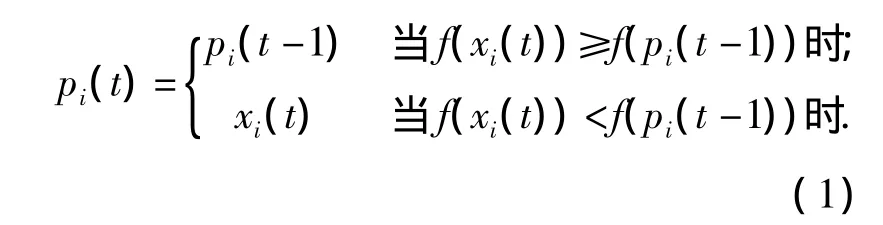
假设寻优问题为求目标函数f(x)的最小值,那么粒子i的个体极值由下式确定
假设群体粒子数为m,则群体粒子的邻域极值为:

按追随当前已知的最优位置的原理,粒子xi将按式(3)改变位移方向和步长.
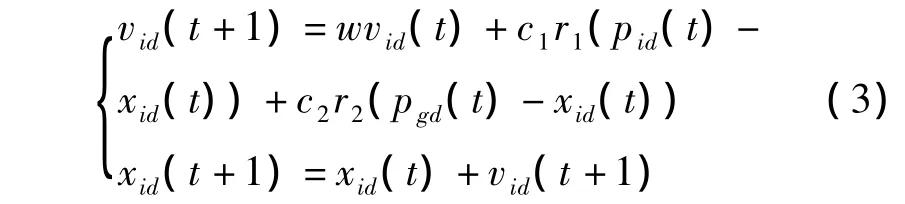
其中:d=1,2,…,n,n 为解空间的维数,即自变量个数,i=1,2,…,m,m 为种群规模,t为进化代数,r1和r2为分布与[0,1]之间的随机数,c1和c2为位移变化的限定因子,通常取为2.0.
w为惯性权重,较大的权重有利于提高算法的全局开发能力,并增加种群的多样性;而较小的权重则能增强算法的局部搜索能力.然而过大的权重将使种群发散,粒子不能改变运动方向以转回需要搜索的指定区域;过小的权重将导致种群的搜索能力丧失,只有很小的惯性从上一步迭代中保存下来,加剧了速度的改变.动态的惯性权重调整通常采用线性递减策略LDIW[9],即:

其中T为当前迭代次数,Tmax为最大迭代次数,wmax为初始惯性权值,wmin为进化到最大代数时的惯性权值.
2 非线性权重递减策略
在PSO算法的搜索过程中可以对惯性权重w进行动态调整.在算法开始时,给w选取较大的值,随着搜索的进行,可以动态地递减w的取值,这样可以保证算法在开始时,各粒子能够以较大的速度步长在全局范围内开发较好的种子;而在搜索后期,较小的w值则保证粒子能够在极点周围做精细地搜索,使算法有较大的几率以一定精度收敛于全局最优解.
在标准PSO算法中,存在粒子容易过早收敛于局部极值的早熟现象,在惯性权重线性递减策略中尤为突出.由于仅仅简单地线性减小权重w,使得函数一旦进入局部极值点邻域内就很难跳出,极易收敛到局部极值点.这主要还是因为在搜索过程中,种群中粒子在位置上缺乏多样性导致的早熟.可以考虑在搜索初期尽可能地保持较大的权重w,使种群粒子飞跃整个搜索空间,以获得更好的多样性,从而尽可能摆脱局部极值的干扰;而当种群搜索到全局最优点附近时,及时快速降低权重w,并在搜索后期保持较小的权重w,使得种群以较强的局部搜索能力收敛到全局最优点.据此,根据Logistic函数的特征,提出一种基于Logistic动态调整惯性权重w的策略LgDW算法,惯性权重w将按S形曲线非线性递减,如图1所示.
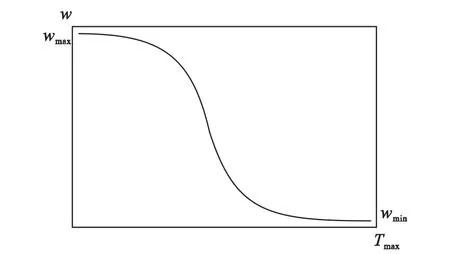
图1 Logistic动态惯性权重w变化趋势Fig.1 The evolution of Logistic dynamic inertia weight
其变化公式为

式中:wmax、wmin、Tmax和 T与(4)式一致;a和 b为调整因子,它们的取值范围为a>0,0<b<1.
3 实验分析
为检验Logistic动态惯性权重PSO算法的效率,并分析确定调整因子,现采用优化领域中常用的4个经典函数来测试分析.
Sphere函数:

其为非凸、病态函数,在xi=0处达到全局最小值f(X*)=0.
Rastrigrin函数:
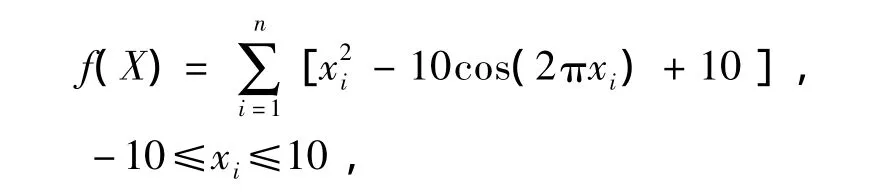
其为多峰函数,在xi=0处达到全局最小值f(X*)=0.
Griewank函数:
其在xi=0处达到全局最小值f(X*)=0.Schaffer函数:
其全局最大值为f(0,0)=1,在距离全局最大点附近存在大量的次全局极大点,函数的强烈震荡使其难于全局最优化.
3.1 调整因子的确定
LgDW算法惯性权重公式(5)中的调整因子a和b可以根据目标函数不同的适应值动态地确定,它们对算法的性能有较大的影响.实验表明:过大的a和b值容易使算法失效,而过小的a和b值则容易使算法陷入局部收敛.它们的取值在10<a<50,0.8<b<0.93时,算法的性能比较好.表1、表2所示的是在a和b不同取值下对5维Rastrigrin函数的实验结果,实验中算法的每组因子随机运行50次,粒子数为30,要求精度为10-8,最大迭代次数为2 000次.
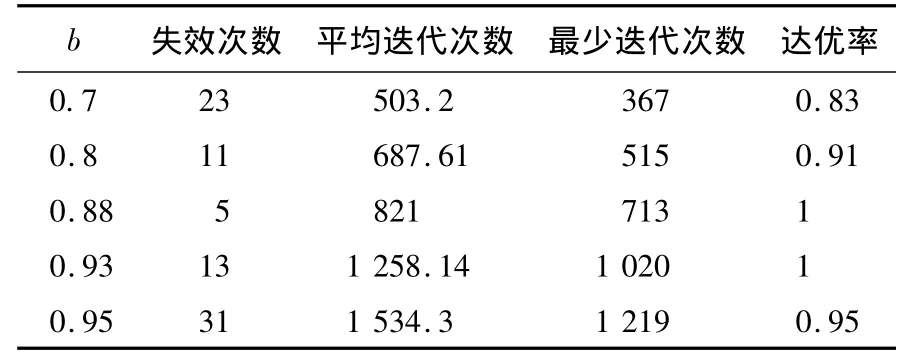
表1 a=30时取不同b值的性能比较Table 1 Comparative results of different b values with a=30
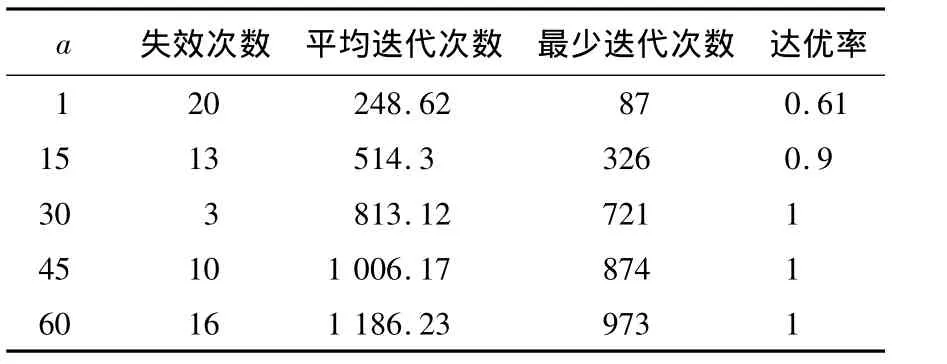
表2 b=0.88时取不同a值的性能比较Table 2 Comparative results of different a values with b=0.88
3.2 数值实验和结果分析
实验中,分别用LDIW策略 PSO算法和LgDW策略PSO算法对4个测试函数进行计算,参数取值 wmax=1.2,wmin=0.1,c1=c2=2.0,a=30,b=0.88,随机运行50次,粒子数为30.实验所得的各测试函数平均最优适应值进化情况如图2~图5所示,数值结果如表3所示.
由进化曲线图可以看出:除了单峰Sphere函数,在优化多峰值的复杂函数(Rastrigrin函数、Griewank函数和Schaffer函数)方面,LgDW策略PSO算法都能较快地收敛于最优解,优于线性递减策略的PSO算法.这主要是较大的惯性权重有利于全局探索,而较小的惯性权重有利于算法的局部开发,加速算法的收敛.
由实验所得的数值结果可以看出:LgDW策略PSO算法对于后面3个多峰函数的优化,最优值、均值及方差均有所改善,其主要原因是在初期较大的惯性权重能增大算法的搜索能力,保持了种群的多样性;而在Sphere函数和高维的Griewank函数改善较小,是因为Sphere函数为单峰函数,而超过15维后Griewank函数特性趋于单峰.说明LgDW策略PSO算法对于多峰值复杂函数具有一定的优越性.
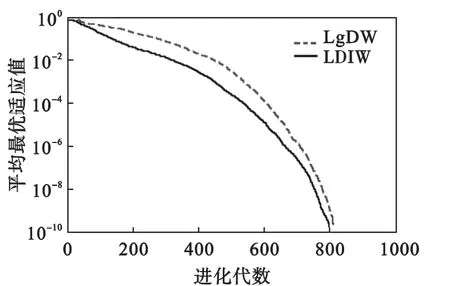
图2 Sphere函数平均最优适应值进化曲线Fig.2 Comparative evolutionary process on Sphere
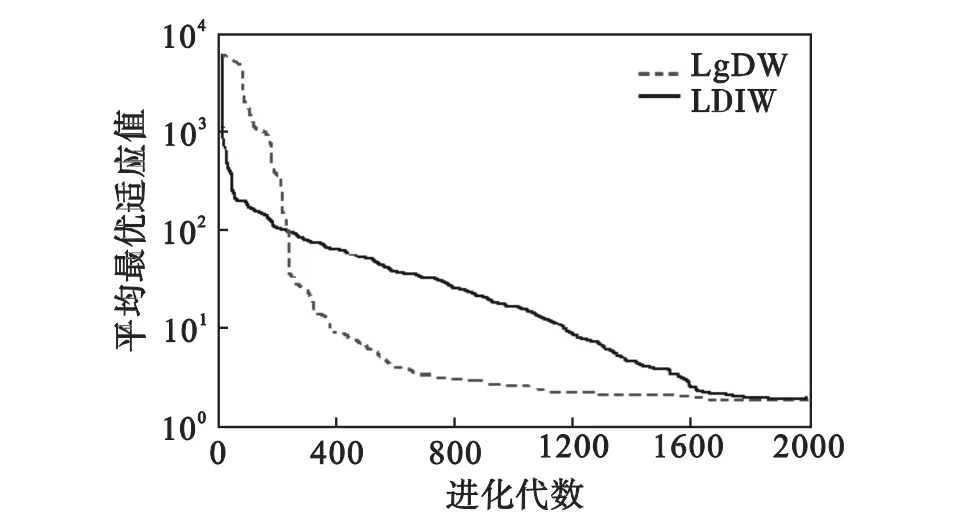
图3 Rastrigrin函数平均最优适应值进化曲线Fig.3 Comparative evolutionary process on Rastrigrin
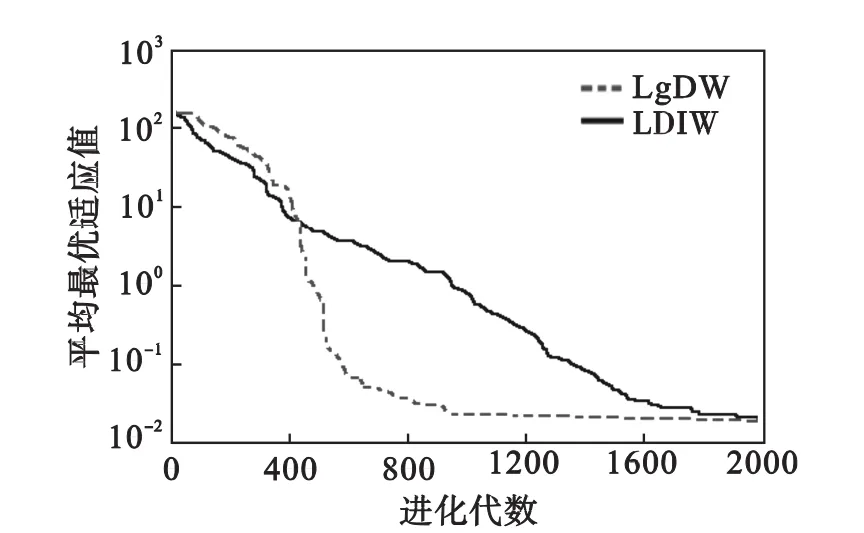
图4 Griewank函数平均最优适应值进化曲线Fig.4 Comparative evolutionary process on Griewank
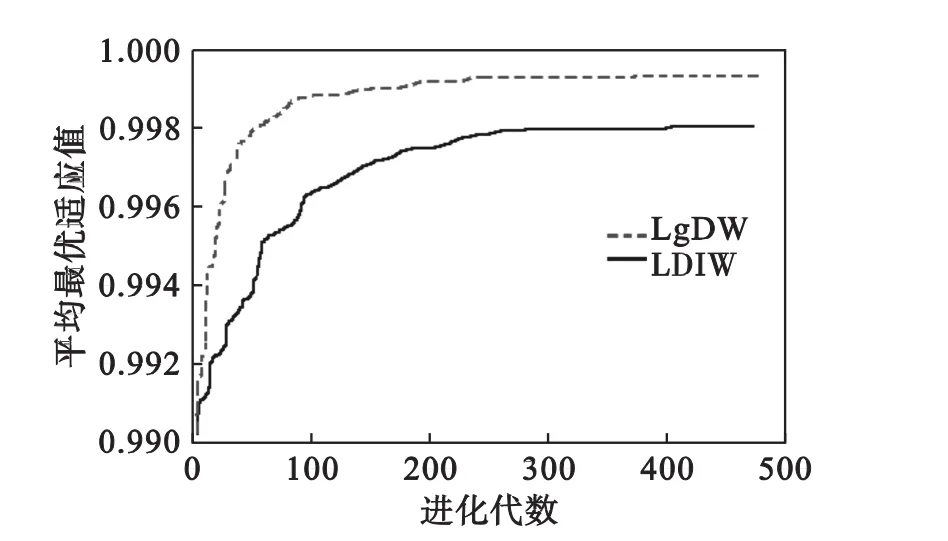
图5 Schaffer函数平均最优适应值进化曲线Fig.5 Comparative evolutionary process on Schaffer
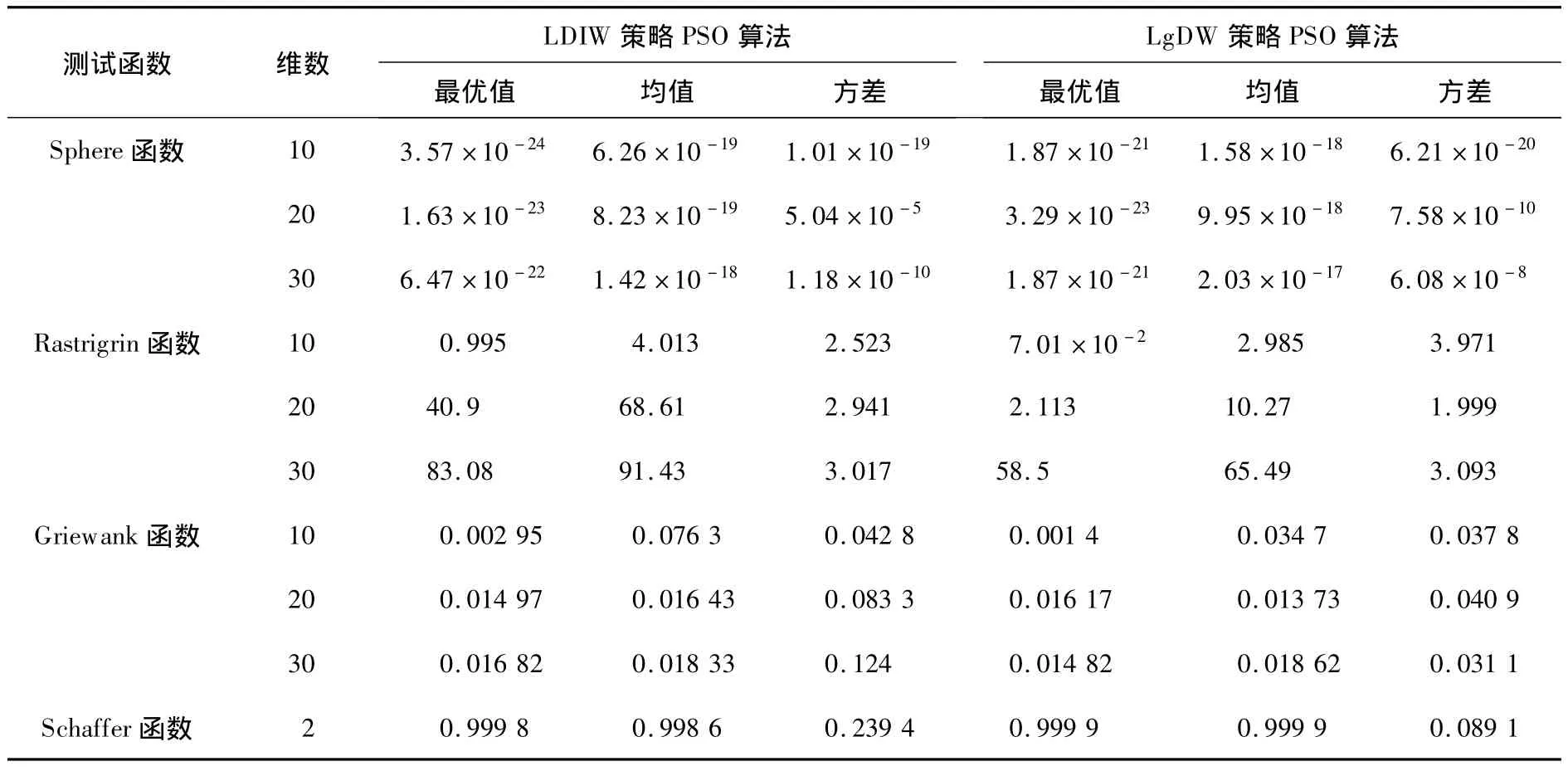
表3 数值结果统计Table 3 Comparative results of LDIW and LgDW on Test Problems
4 结论
作为新的进化计算方法,粒子群优化(PSO)给大量非线性、不可微和多峰值复杂问题的优化提供了一种新的思路.本文根据PSO算法惯性权重在优化问题过程中的表现特征,提出了一种基于Logistic模型的动态惯性权重的LgDW策略,数值实验表明:LgDW策略对于多峰值的复杂函数的优化体现出了较好的性能,具有一定的优越性.
[1] Kennedy J,Eberhart R C.Particle Swarm Optimization[C]//Proc of IEEE Int Conf on Neural Networks.Perth:IEEE,1995:1942-1948.
[2] Shi Y,Eberhart R C.A Modified Particle Swarm Optimizer[C]//Proceedings of the IEEE Congress on Evolutionary Computation.Now York:IEEE,1998:303-308.
[3] Shi Y,Eberhart R C.Parameter Selection in Particle Swarm Optimization[C]//In Proceedings of the Seventh Annual Conference on Evolutionary Programming.New York:Springer-Verlag,1998:591-600.
[4] Shi Y,Eberhart R C.Fuzzy Adaptive Particle Swarm Optimization[C]//The IEEE Congress on Evolutionary Computation.San Francisco:IEEE,2001:101-106.
[5] Eberhart R C,Shi Y.Tracking and Optimization Dy-namic Systems with Particle Swarms[C]//The IEEE Congress on Evolutionary Computation.San Francisco:IEEE,2001:94-100.
[6] Chatterjee A,Siarry P.Nonlinear Inertia Weight Variation for Dynamic Adaptation in Particle Swarm Optimization[J].Computers and Operations Research,2006,33(3):859-871.
[7] 陈贵敏,贾建援,韩琪,等.粒子群优化算法的惯性权重递减策略研究[J].西安交通大学学报,2006,40(1):53-56.
[8] 张选平,杜玉平,秦国强,等.一种动态改变惯性权的自适应粒子群算法[J].西安交通大学学报,2005,39(10):1039-1042.
[9] Shi Y H,Eberhart R C.Empirical Study of Particle Swarm Optimization[C]//Proc of IEEE Congress on Evolutionary Computation.Washington:IEEE,1999:629.
