基于视频分析的车流量统计算法研究
2013-10-27吕扬建李光耀
吕扬建,李光耀
基于视频分析的车流量统计算法研究
*吕扬建,李光耀
(同济大学电子与信息工程学院,上海 201804)
车流量统计作为智能交通系统的关键技术之一,逐渐成为研究的热点。主要研究了基于虚拟线圈的车流量统计算法和基于目标跟踪的车流量统计算法,综合了两种算法的优势,结合Canny算子边缘检测算法、均值背景建模法和背景差分法等技术,提出了一种基于质心的车流量统计综合算法。实验结果表明综合算法在实时性和准确性方面均取得较好的实验结果。
智能交通系统;车流量;虚拟线圈;目标跟踪
0 引言
随着我国经济的飞速发展,我国的城市交通量也骤然增加,于是基于视频分析的智能交通系统的重要性日益显著[1],车流量统计作为智能交通系统的关键技术之一,逐渐成为研究的重要领域。车流量统计可以为道路智能化调度管理提供依据,从而减少道路拥塞,提高路面资源的利用率。目前有很多种方法来进行车流量统计,例如:电磁感应装置法和超声波检测法。然而,车辆在行驶过程中,车辆速度、方向始终变化,所以普遍存在反射信号不稳定,测量误差大的问题。基于视频分析的车流量统计算法适应性强且容易维护,目前已经开始应用于智能交通监控系统中[2]。90年代开始,基于视频分析的车流量统计产品开始进入商业化应用,美国的ISS公司生产的AUTOSCOPE系统和日本 Sumitomo 公司的 IDET是其中比较有代表性的[3]。与其相比,国内对基于视频分析的车流量统计技术的研究起步较晚,但是由于我国城市交通越来越拥堵,近些年也对这方面的研究加大投入,如清华紫光和清华大学联合开发的车流量统计系统VS3001[4]和厦门恒深智能有些公司开发的车流量统计系统HeadSunSmartViewer-II[5]
本文以获取道路的车流量为目标,研究基于视频分析的车辆车流量统计技术,讨论了现有的两种常用的车流量统计算法:基于虚拟线圈的车流量统计算法[6-7]和基于目标跟踪的车流量统计算法[8-9]。一般评价一个基于视频分析的车流量统计算法有两个重要的评价指标:实时性和准确性[10],本文也主要从这两个角度来评价算法,通过改进,提出了一种基于质心的车流量统计综合算法。本文还介绍了实现该方法所要用到的一些关键方法和步骤:Canny算子边缘检测算法、均值背景建模法和背景差分法,并且通过实验对比验证了本文所改进算法的优越性。
1 两种常用的车流量统计算法
1.1 基于虚拟线圈的车流量统计算法
智能交通系统中对车流量统计有很高的实时性要求。因此,在大多数采用车流量统计算法中很少对提取的整个监控图像进行检测和分析,通常都是进行基于感兴趣区域的局部检测[11],即基于虚拟线圈检测。虚拟线圈概念与传统的物理线圈对应的,实际上是指图像中设置一块矩形区域,也就是我们所感兴趣的区域,如图1所示。该区域的选取一般是根据道路的结构特征和环境而定的。如果采用背景差分法检测运动车辆,在检测结果中,用像素值0表示背景,对应图像中的黑色区域,用像素值255表示运动车辆,对应图像中的白色区域。当车辆经过虚拟线圈的过程中,该区域便会呈现黑-白-黑的变化。因此,在图像中设置虚拟线圈,通过检测虚拟线圈中像素的变化便可检测出车流量。
车辆沿箭头方向行驶,虚拟线圈设置于车道中央,大小与车体基本相同。由于一个车辆在经过虚拟线圈的时候对一段连续图像帧序列进行处理,为了避免对一辆车辆重复计数,引入一个状态变量state,当有车辆在虚拟线圈内时,状态变量state=1,当虚拟线圈内没有车辆时,状态变量state=0,根据以下的规则来判定是否有车通过虚拟线圈:
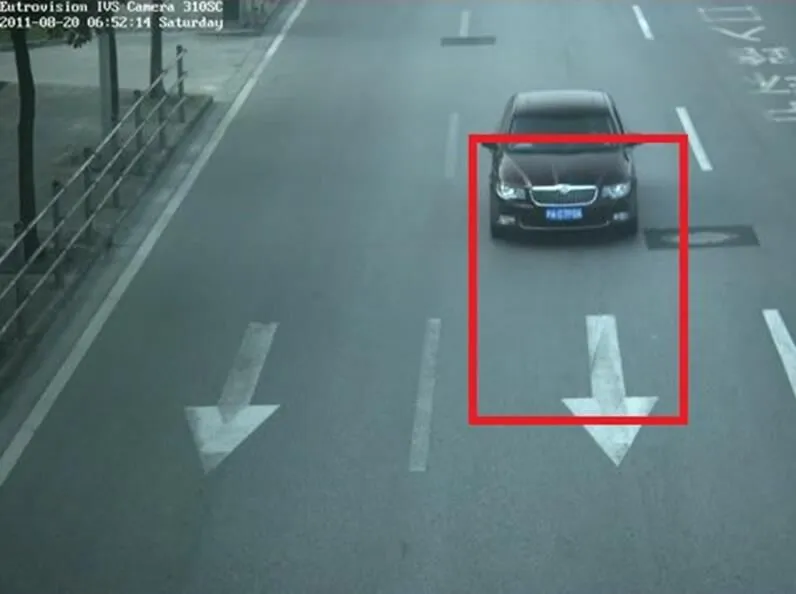
图1 基于虚拟线圈的车流量统计算法效果图
1)上一帧状态变量state=0,当前帧与背景模板作对比,当突变像素点的数量<虚拟线圈内像素总数的10%,设置当前帧状态变量state=0,表明没有车经过;
2)上一帧状态变量state=0,当前帧与背景模板作对比,当突变像素点的数量>虚拟线圈内像素总数的10%,设置当前帧状态变量state=1,表明有车辆进入到该区域;
3)上一帧状态变量state=1,当前帧与背景模板作对比,当突变像素点的数量>虚拟线圈内像素总数的10%,设置当前帧状态变量state=1,表明该车还没有驶出该区域;
4)上一帧状态变量state=1,当前帧与背景模板作对比,当突变像素点的数量<虚拟线圈内像素总数的10%,设置当前帧状态变量state=0,表明车已经驶出[12]。
当车辆通过虚拟线圈时,从驶入虚拟线圈到驶离虚拟线圈的过程中,虚拟线圈内的目标像素个数会随着车辆的运动呈现出有规律的周期变化:从理论上来说,当车辆刚开始驶入虚拟线圈时,目标像素个数从零开始逐渐增加;当车辆完全被虚拟线圈覆盖时,目标像素个数达到峰值;当车辆开始驶离虚拟线圈时,目标像素点开始逐渐减少,当完全离开虚拟线圈,目标像素个数变为零。
1.2 基于目标跟踪的车流量统计算法
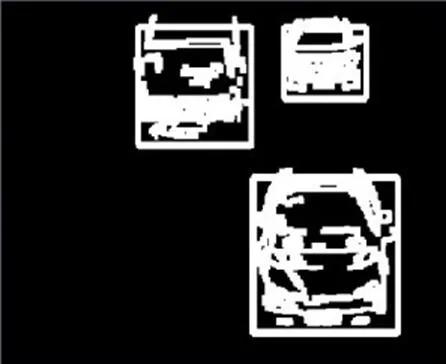
基于目标跟踪的车流量统计算法主要思想是对连续的图像帧序列进行分析,在相邻帧之间根据车辆的特有属性(如大小、形状、位置等)进行相关联。也就是在当前帧获得所需要的目标像素后,在相邻的下一帧中寻找与其相匹配的目标像素,以此来获取目标的运动轨迹,为更加深入的图像处理研究提供基础[13]。图2是基于目标跟踪的车流量统计算法的效果图。
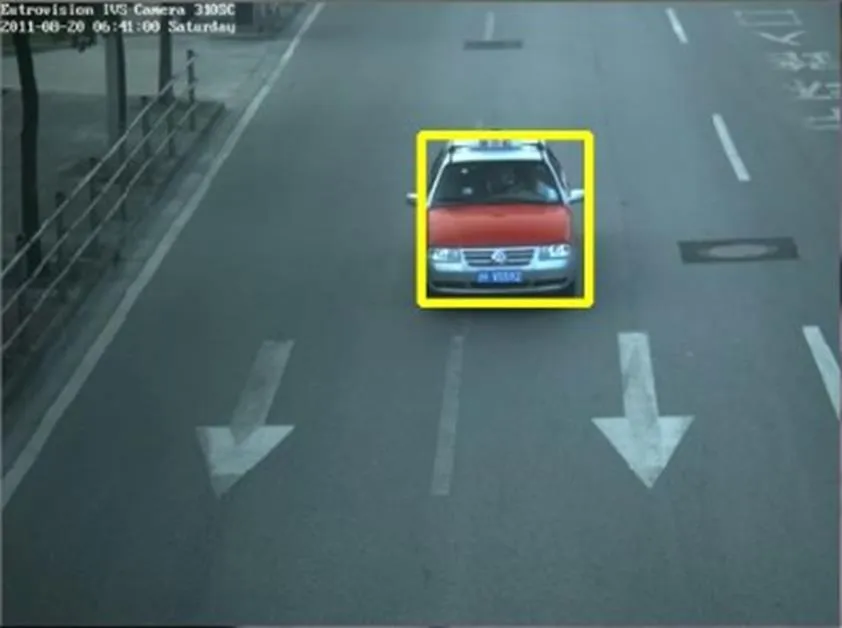
图2 基于目标跟踪车辆检测算法效果图
基于目标跟踪的车流量统计算法主要是在检测区域中对运动目标进行检测、匹配和跟踪,确定车辆的运动轨迹,根据车辆运动轨迹的持续性完成车辆目标计数。进行图形的预处理后,首先要进行目标检测,进行目标检测的目的是将汽车从图像中提取出来,能否正确地分离运动的汽车是基于目标跟踪车辆计数方法的关键。提取出运动的汽车后,对连通区域进行标记,画出连通区域的最小外接矩形。在此基础上进行标跟踪,根据汽车的有效特征,通过一些匹配算法,在序列图像上找出与汽车模版最相似的位置,给汽车定位,基于目标跟踪的车流量统计算法的总体流程如下:
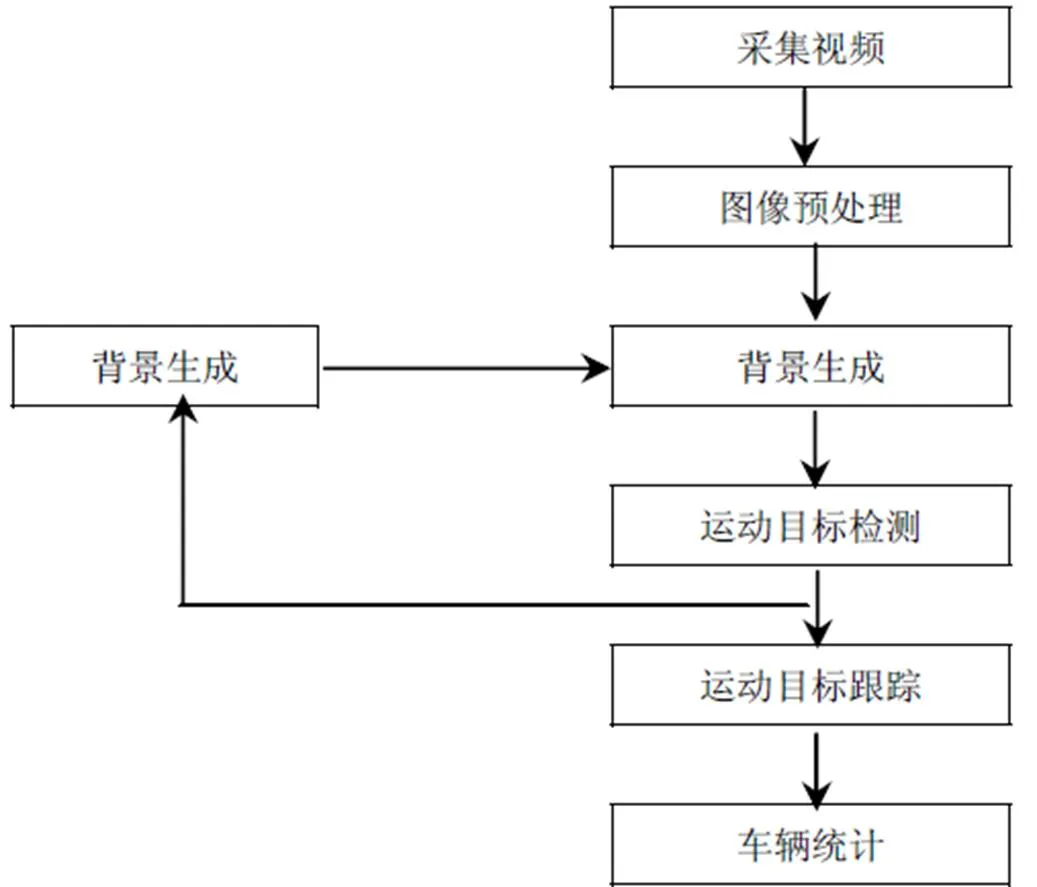
图3 检测算法流程图
1.3 两种常用的车流量统计算法的比较
在算法的时间复杂度方面,基于目标跟踪的车流量统计算法需要进行车辆检测,而且检测完后需要根据车辆的特有属性来进行车辆目标跟踪,所以时间复杂度比较高,实时性不强;而基于虚拟线圈的车流量统计算法仅仅是对图像中某些感兴趣区域的像素进行提取并分析,同时算法简单[14],所以时间复杂度比较低,实时性较强。
在车流量统计的准确性方面,基于目标跟踪的车流量统计算法可以根据需要剔除那些面积小的目标,减少行人、自行车等非感兴趣目标的干扰,所以车流量统计的准确性较高,此外,基于目标跟踪的车流量统计算法通过目标跟踪获得了车辆目标的轨迹和准确位置,为车速测量和车型分类等研究课题打好了基础。而基于虚拟线圈的车流量统计算法获得车辆目标的信息较少,而且容易受到外界环境的影响从而影响车流量统计的准确性。
综合以上分析,两种常用车辆计数算法各有优缺点,基于目标跟踪的车流量统计算法在时间复杂度方面比较有优势,而基于虚拟线圈的车流量统计算法在车流量统计的准确性方面表现的更加突出。
2 相关背景知识
2.1 Canny算子边缘检测算法
传统Canny算子边缘检测算法主要包括4个部分:图像滤波、计算图像梯度、抑制梯度非极大值、检测和连接边缘。
1)对图像进行平滑滤波
Canny算法首先用二维高斯函数的一阶导数,对图像进行平滑滤波,所选二维高斯函数如下:
其对应的梯度矢量为:

2)计算图像梯度
传统Canny算法采用2×2 邻域一阶偏导的差分来计算经过平滑滤波后的数据阵列 I(x, y)的梯度幅值和方向。其中,x 方向和y 方向的偏导数的两个阵列Gx[i,j]和Gy[i,j]分别为:

那么利用二阶范数来计算梯度幅度为

梯度方向为:

3)抑制梯度非极大值
传统Canny算法抑制梯度非极大值是遍历图像每一个梯度幅度非零的点,查找沿其梯度方向的相邻像素点,如果该点梯度幅度小于相邻像素点的梯度幅度,则此点不是边缘点。否则,则为候选边缘点。
4)检测和连接边缘
传统Canny算法选用高、低两个阈值Vh和Vl对候选边缘点做进一步的处理,如果候选边缘点的梯度幅度大于高阈值Vh,则一定是边缘点;如果候选边缘点的梯度幅度小于低阈值Vl,则一定非边缘点;介于高阈值Vh和低阈值Vl之间的候选边缘点如果与上述得到的边缘点有邻接,则也是边缘点[15]。
2.2 均值背景建模法
均值背景建模法主要是把连续的N帧视频帧序列存储起来,并且计算同一个点像素值的平均值,其计算公式为:
2.3 背景差分法
背景差分法主要是用当前帧减去背景帧,从而获得所需要的前景目标。设P(i,j)表示当前帧,B(i,j)表示背景图像[16],则差分图像D(i,j)表示为:

由于受到光照、天气情况等影响,所以背景帧要定时更新。图3是进行背景建模和背景差分的示意图。
3 车流量统计综合算法改进
本文采用的基于质心的车流量统计综合算法,在车辆目标的检测阶段采用基于目标跟踪的车流量统计算法,当检测到车辆目标后,改用基于目标跟踪的车辆计数算法,对车辆进行跟踪,当跟踪的持续性大于某一阈值时,车流量的统计数加一。
算法总体思想描述:首先在车道上设置一个检测区域ROI,对虚拟线圈区域进行分析,根据虚拟线圈区域的变化来判断虚拟线圈区域内有否车辆通过,此时执行的是基于虚拟线圈的车辆计数算法;当检测到有车辆通过时,切换到基于目标跟踪的车流量统计算法,首先对汽车进行轮廓提取,提取出车辆的轮廓信息,本文采用的基于Canny算子的边缘检测法来提取车辆的轮廓信息;然后根据找到的车辆轮廓画出其矩形边界,得到矩形边界后我们就可以确定包围汽车矩形边界的质心;根据同一个车辆目标在连续图像帧序列中的质心来跟踪车辆目标;当跟踪同一辆车辆的持续时间大于某一阈值时,车流量统计数加一。
本文采用的综合汽车检测算法相较于两种常用的车流量统计算法,主要有两点改进:
(1)发挥了两种常用的车流量统计算法各自的优点,当没有检测通过时,采用基于虚拟线圈的车流量统计算法,发挥了此算法在时间复杂度方面的优势,当检测到有车辆通过时,进行车辆跟踪,从而提高了车流量统计的准确性,并且为后续的研究做好基础性工作。
(2)本文采用车辆跟踪方法是根据当前帧中车辆目标的质心位置和相邻的下一帧中目标车辆的质心位置做比较,如果两者的质心位置小于某一阈值,则认为是同一辆车辆,继续跟踪这辆车辆。如果大于某一阈值,则认为是刚进入的车辆。其中基于质心的车辆目标跟踪方法如下:
①在画出车辆轮廓的外接矩形边界后,我们可以得到外接矩形边界左下角的坐标为(,),矩形的长度为l,宽度为,设车辆轮廓的质心坐标为(C,C)。并且把C、Cy保存到数组[],[],车流量为。其中:
②在检测区域ROI内,检测是否有新的车辆进来。
其中dis是车辆跟踪的距离阈值。
4 实验结果与分析
为了证明本文所提出综合算法的有效性和优点,本文利用OpenCV在VS2010平台上进行仿真分析,程序运行效果如图4所示。

(a)原始图 (b)背景图
(c)前景图 (d)跟踪目标图
图5 程序运行效果图
Fig.5 Effect chart of program running
为了验证本文提出的算法在车辆统计的准确性和实时性,实验数据采用了不同场景下30分钟和45分钟的交通视频流。本文提出算法与基于虚拟线圈的车流量统计算法和基于目标跟踪的车流量统计算法在两个场景Scene1,Scene2下,对车辆识别率和处理帧速度两方面进行了对比测试,得到车流量统计结果如表1所示。
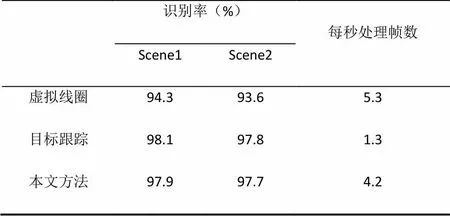
表1 车流量统计结果图
从表1可以看出,本文所改进的算法在两个场景中都识别率较高,跟基于目标跟踪的车流量统计算法的识别率相差不大,而每秒处理帧的数量较基于虚拟线圈的车流量统计算法有比较大的提高,在车流量统计的准确性方面和时间复杂度的两方面都达到了比较好的结果,达到了算法预期的设计目的,总体效果还是令人十分满意的。
5 结束语
本文对现有的两种常用车流量统计算法进行了对比和分析,提出了了一种基于质心的车流量统计综合算法,从实验结果可以看出,本文提出的改进算法能够满足车流量统计的实时性要求,同时又具有较高的准确度。然而,同现有的许多方法一样,本文的方法在夜间和恶劣环境(如大雨、大雪等)下的路面上并不能得到较高的准确性,也是目前这个研究领域公认的难题,这也是本文作者继续研究的方向。
[1] 张帅,崔本亮,黄学达. 视频检测技术在公路车流量检测系统中的应用[J].实验室研究与探索,2012,31(10):64- 66.
[2] Wang Guolin,Xiao Deyun,Gu J. Review on vehicle detection based on video for traffic surveillance[C]. IEEE International Conference on Automation and Logistics,2008: 2961-2966.
[3] 王荣.智能交通系统中的一些算法的研究与实现[D].成都:四川大学,2011.
[4] 朱志刚,徐光佑.VISATARAM:全天候自动交通检测视觉系统[C].北京智能交通系统发展趋势国际学术研讨会论文集,1997.
[5] Haritaoglu I, Harwood D, Davis L. W4: Real-time surveillance of people and their activities [J]. IEEE Trans Pattern Analysis and Machine Intelligence, 2000, 22 (8): 809-830.
[6] 张飞 ,王库 ,史小磊.基于机器视觉的公路车流量检测系统研究[J]. 微计算机信息.2008,24(2):138-140.
[7] 墨芹.运动车辆视频检测与车流量检测方法的研究[D].长沙:中南大学,2012.
[8] 王晓.基于视频图像处理与跟踪的公交客流检测技术研究[D].青岛:中国海洋大学,2005.
[9] 田立明.基于视频的高速公路车流量检测系统研究与实现[D].济南:山东大学,2012。
[10] 谭晓军,沈伟,郭志豪. 一种基于视频的道路交通流量监测方法[J].计算机应用技术.,2005, 25(5):1215-1218.
[11] 王勃,贾克斌.基于视频分析的车流量综合检测算法[J]. 交通信息与安全, 2010, 28 (1): 20-25.
[12] 王小鹏,郭莉琼.公路车流量视频检测方法[J].计算机应用,2012,32(6) : 1585 -1588.
[13] 肖文明,基于DSP的车流量视频检测技术及其实现研究[D].昆明:云南大学,2011.
[14] 李天坤,基于视频检测技术的车流量检测算法研究[D].长春:吉林大学,2011.
[15] 苏恒阳,袁先珍,一种改进的Canny的图像边缘检测算法[J].计算机仿真,2010,27(10):242-245.
[16] 崔凤英,基于视频的车流量检测算法研究[D].青岛:青岛科技大学,2007.
THE ALGORITHM RESEARCH OF TRAFFIC FLOW MEASURING BASED ON VIDEO ANALYSIS
*Lü Yang-jian,LI Guang-yao
(School of Electronics and Information,Tongji University,Shanghai 201804,China;)
Statistics of the traffic flow, as one of the key technology of intelligent transportation system, gradually become a research hotspot. We mainly studied two kinds of existing algorithms for statistics of the traffic flow: traffic statistics algorithm based on virtual loop and traffic statistics algorithm based on target tracking. Furthermore, we integrated the advantages of both methods and combined with some technology Canny operator edge detection algorithm, the mean background modeling method and background difference method. Finally, we proposed an improved traffic statistics algorithm based on mass. Experimental results show that integrated algorithm achieves good results in real-time and accuracy.
intelligent transport system ; traffic flow;virtual loop;target tracking
TP391
A
10.3969/j.issn.1674-8085.2013.04.010
1674-8085(2013)04-0046-06
2013-04-18;
2013-05-25
上海市科委国际合作基金资助项目(10510712500)
*吕扬建(1990-),男,浙江温州人,硕士生,主要从事图形处理、虚拟现实研究(E-mail: 343784928@qq.com);
李光耀(1965-),男,安徽安庆人,教授,博导,主要从事大规模城建模与仿真、数据挖掘研究(E-mail:lgy@tongji.edu.cn).