面曝光快速成形激光液位检测系统的研究
2013-10-27闫达海胥光申
闫达海,胥光申
(西安工程大学机电工程学院,西安 710048)
面曝光快速成形技术以可见光为光源,将三维模型经计算机按一定厚度切片分层后,形成能反映层面特征的截面图形,经视图发生器聚焦到树脂表面生成视图,以该视图为掩膜,进行选择性固化.在面曝光成形工艺过程中,由于环境温度变化,树脂固化时体积改变及升降台在树脂槽内连续下降等因素的影响,树脂液位会产生波动.为了保证树脂液位始终在工作面上,需要检测液位高度,并及时进行调整[1-2].液位测量方法可以分为直接和间接测量法,直接测量法主要是目测式;间接测量法又分为接触式和非接触式[3].接触式液位测量主要有电容式、电感式、电阻式、光纤式等[4],目前光纤式测量方法的精度较高,利用光在光纤中受抑全内反射原理研制智能型高精度光纤液位传感器,可以精确地检测树脂液位高度[5].由于光敏树脂粘度高、腐蚀性强且有毒性,所以多采用非接触式方法检测.非接触式液位测量主要有光电式、超声波、放射线、微波式、激光式等[4].面曝光快速成形分层厚度一般选择0.1 mm,液位检测时要求至少能分辨一个层厚0.1 mm,而只有激光式液位检测系统能够达到要求.本文根据一维位置传感器(PSD)的性质和激光三角法[6]测量原理设计了树脂液位高度检测系统,该系统已经成功应用于面曝光快速成形系统.
1 激光液位检测系统的测量原理
1.1 一维PSD工作原理
PSD是一种能测量光斑在探测器表面上连续位置的光学探测器.它有位置分辨率高、光谱响应宽、响应速度快和处理电路简单等优点,如图1所示.
图1(a)为一维PSD的截面图,它是一种P-I-N结构,当入射光照在PSD表面时,产生横向光电效应,两端电极输出光电流I1和I2.图1(b)为一维PSD的等效电路图,当坐标原点设在PSD中心时,得到公式[7]:
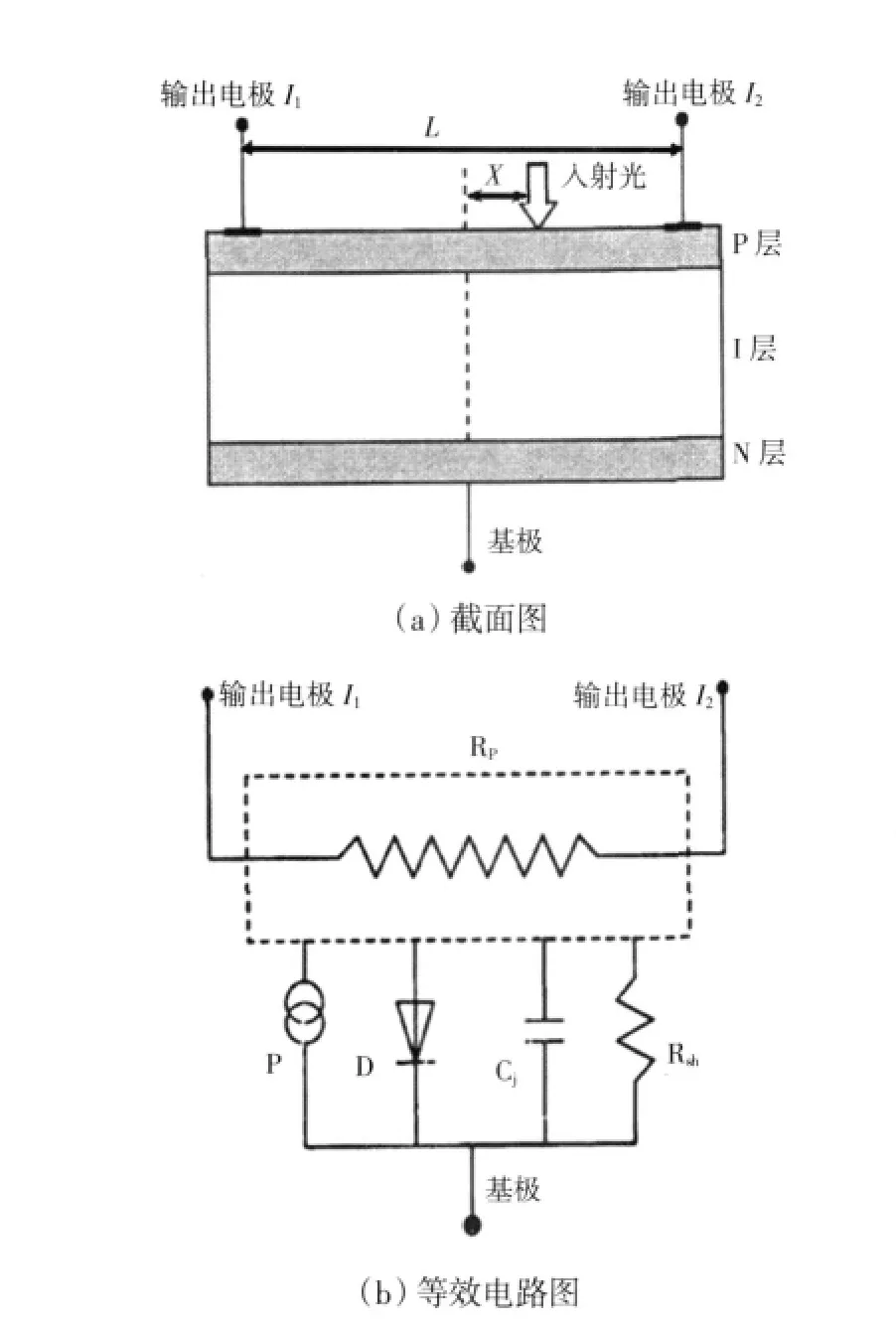
图1 一维PSD截面图和等效电路图Fig.1 One-dimensional PSD sectional view and equivalent circuit diagram

1.2 激光三角法测量原理
激光三角法测量原理如图2所示[6].
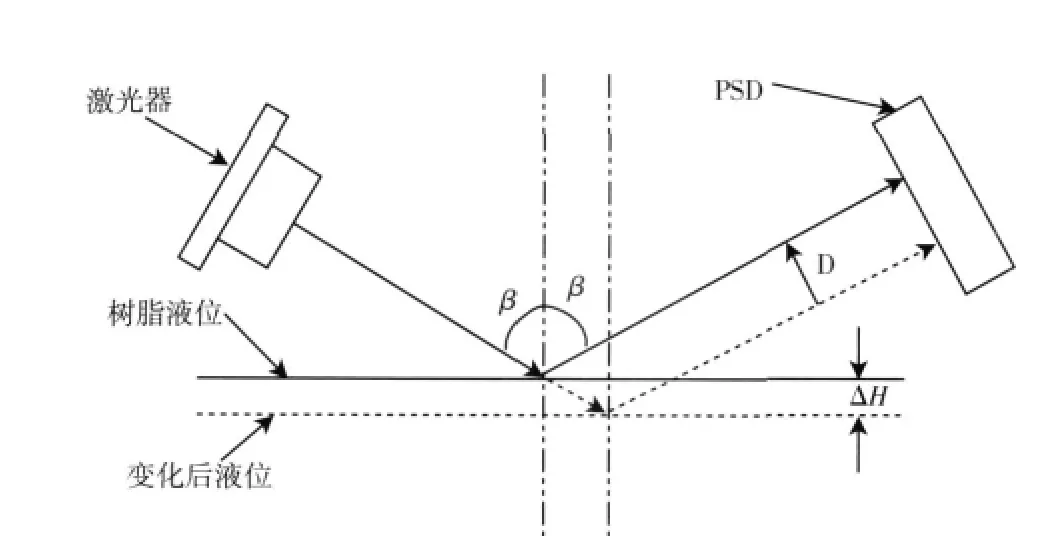
图2 激光三角法测量原理图Fig.2 Laser triangulation measuring principle
半导体激光器发出的激光束以一定的角度照射到被测液面,经液面反射后垂直入射到PSD感光面上,PSD两端产生对应的光电流.被测液面的高度变化会引起反射光斑在PSD表面移动,其两端的光电流也随之改变,以此来反应液面的高度情况.当激光入射角为β、被测液面变化ΔH(mm)时,对应反射光斑在PSD上的位置变化为D(mm),由此易得关系式[6]:

由式(2)可知,只要计算出光斑在PSD上位置变化D的值,即可测得液位变化的高度.由PSD的工作原理可知,外围电路输出的电压值与光斑在PSD表面上的位置成线性关系,因此根据信号处理电路输出的电压值,得出位置变化D的值,从而测得高度ΔH.
2 激光液位检测系统的设计
2.1 系统组成
针对面曝光快速成形技术的精度、树脂性质等要求,设计了树脂液位检测系统.该系统主要由PSD检测系统和数据采集系统构成,如图3所示.

图3 系统结构框图Fig.3 System structure diagram
由图3可以看出,激光器发射的激光经一定的角度入射到树脂表面,一维PSD接收树脂表面反射的激光,并将光信号转换成微弱的电流信号.信号处理电路将电流信号经过I/V转换后,再对电压信号进行求和与求差,最后和差相除,得到一个模拟电压信号,A/D转换芯片将模拟电压信号转换为数字信号.根据数字信号和光在PSD上产生电流的线性关系计算出树脂液位高度,检测结果通过LCD显示器显示或通过RS-232接口与上位机通信,以满足实时测量和记录的需求.
2.2 一维PSD和半导体激光器的选择
在本系统设计中,光学探测器采用型号为QYPSD0120(上海青岳电子科技有限公司)的一维PSD,其有效光敏面为1 mm×20 mm,分辨率为0.1 μm,光谱响应范围 380~1100 nm,响应时间 0.8 μs,工作温度为-10~60℃,满足面曝光快速成形实验的要求.
面曝光快速成形连续工作时间长,需要选择性能稳定、寿命长的激光器;且检测光源的波长必须在PSD的光谱响应范围内.半导体激光器有体积小、重量轻、运转可靠、耗电少、效率高等优点,且应用非常广泛.采用型号为DD650-2.5-5(西安华科光电有限公司)的红光半导体激光器作为光源,其波长为650 nm,输出功率2.5 mW,光束出瞳孔径为Φ5 mm,工作电压为直流5 V,光束发散度0.5 mrad,工作温度为-10~40℃,使用寿命大于等于8000 h.
2.3 激光束入射角度的确定
采用激光三角法测量液位时,激光束入射角度对检测效果有很大的影响.树脂对激光束的反射率和工作台的安装空间是影响入射角度的2个主要因素.当激光从光疏介质空气(折射率n1=1.00029)射向光密介质树脂(折射率约为n2=1.52)时,在树脂表面将发生折射和反射,根据折射定律和菲涅尔公式,可以得到入射角β和能量反射率R之间的关系,如图4所示[8].
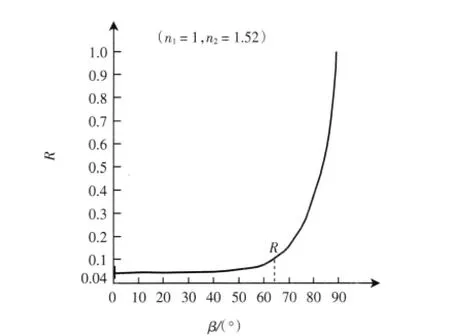
图4 激光入射角与反射率之间的关系Fig.4 Relationship of laser incidence angle and reflectance
由图4可见,液面对激光的能量反射率R随着入射角β的增大而增大,以此考虑入射角越大效果越好,有利于增强PSD的输出信号.但是由于工作台安装空间的限制,入射角选为64°,此时能量反射率为10%.
2.4 PSD信号处理电路
在液位检测时,PSD两端输出为微弱的光电流I1和I2,所以对光电流的提取是至关重要的.图5所示为PSD信号处理电路的方框图[9].信号处理电路分为前置运放电路和后置处理电路2部分:前置运放电路实现I/V转换;后置处理电路对电压信号进行相加和相减,最后相除,得到信号.
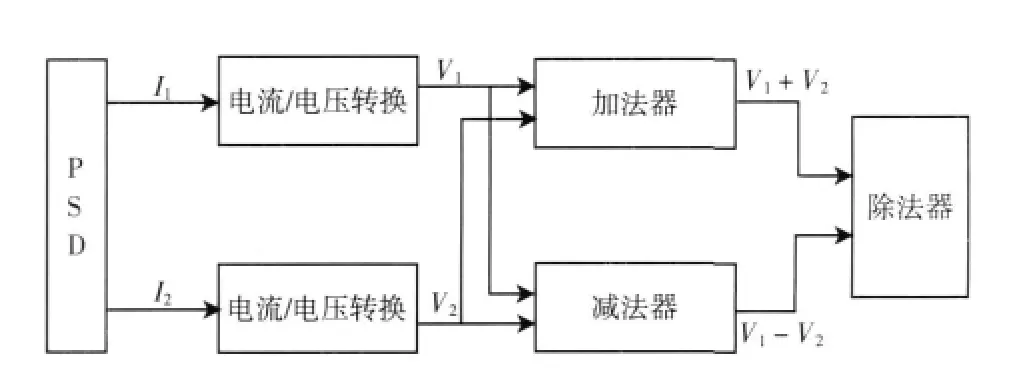
图5 PSD信号处理电路方框图Fig.5 PSD signal processing circuit block diagram
在PSD信号处理电路中,运算放大器选用OP37,它具有失调电压小、偏置电流小、高精度、低噪声、低温漂、高输入阻抗等特点,提高了系统的测量精度,除法电路由模拟乘法器(AD633)和运算放大器组成.电路中对电阻和电容的精度要求较高,选用千分阻和高精度电容.另外,一维PSD也集成在信号处理电路板上,增强信号的抗干扰能力,提高检测精度.
在液位检测中,除了工作激光外,还有日光灯等杂散光都会引起PSD检测的误差,并且当背景光较强时,信号光强度的变化也将影响检测的结果.另外,当没有激光照射时,PSD两电极有暗电流输出,会带来误差和噪声.在信号处理电路中,采用加反偏电压的方法来消除背景光和暗电流对测量结果的影响,提高检测精度,即先在没有激光照射的情况下,通过加反偏电压调零来抵消影响,再打开激光器进行检测.
2.5 数据采集系统
数据采集系统的核心是STC89C52单片机,模数转换芯片选用AD7862-10.PSD信号处理电路处理后的模拟信号变化幅度在±10 V之间,因此选用AD7862-10芯片进行模数转换,它是一款高速、低功耗、双核12位模数转换器,采用+5 V单电源供电,可接受的模拟输入范围为±10 V.
数据采集系统的处理程序主要包括系统标定和液位显示2个部分:系统标定是确定AD芯片转换的数字信号与实际位移的关系式;液位显示实现位移值的输出,包括采集系统中的LCD显示和上位机显示.
3 激光液位检测系统标定
3.1 标定实验
系统标定时采用高精度步进电机控制的升降台作为标准测量仪器,步进电机升降台的最小步距为0.4 μm[10],实验中记录升降台移动的距离(即液位高度)和AD7862-10输入端的电压信号.
当激光功率为2.5 mW、β=64°时,升降台托住装有液态光敏树脂的表面皿每次移动0.1 mm.每个采集点读取10次,去掉其中的最大值和最小值后取平均值,以消除误差,记录的部分数据如表1所示.
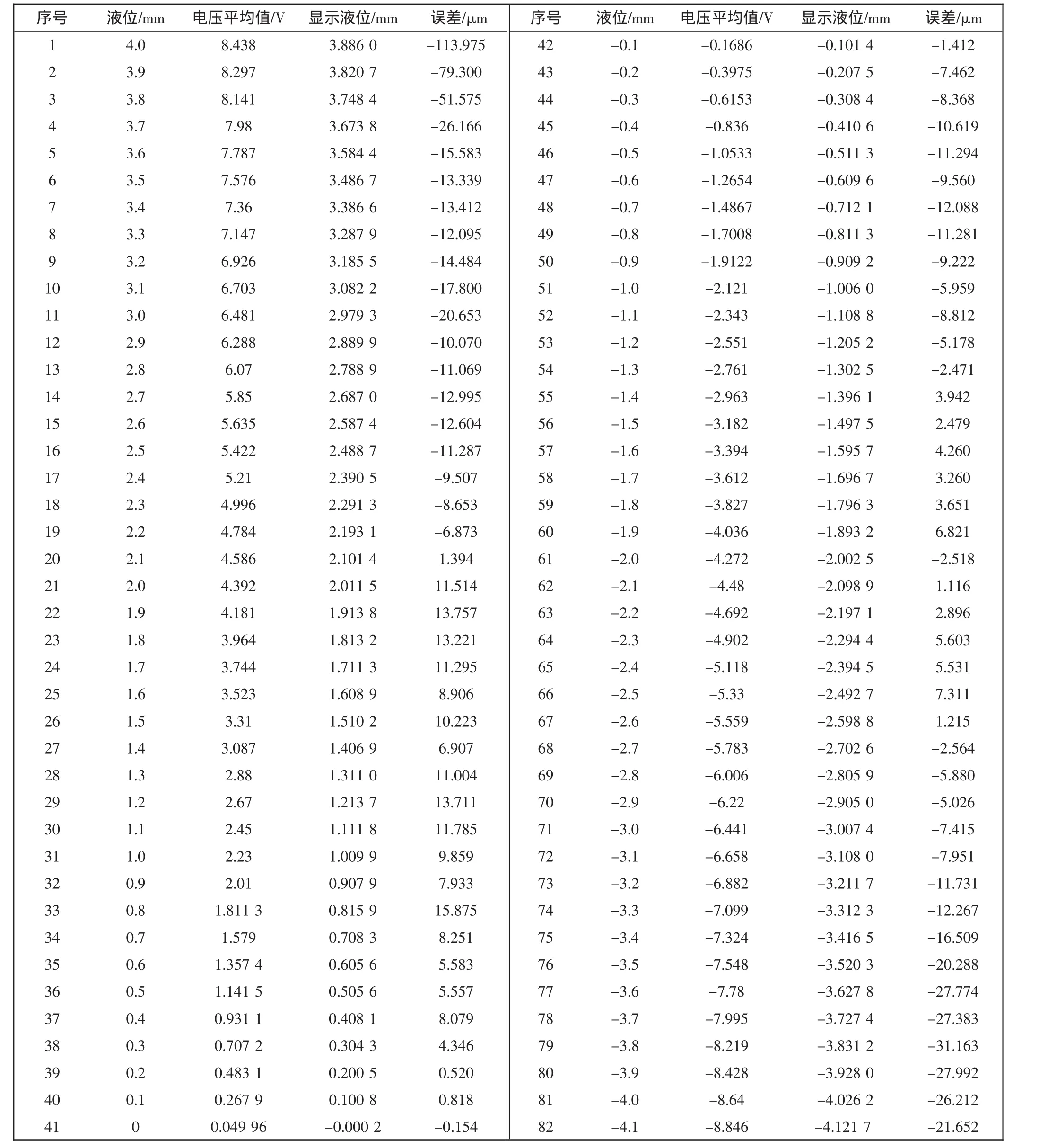
表1 输出电压与液面高度的部分数据列表Tab.1 Part data list of output voltage and liquid level height
针对PSD的线性输出特性,采用最小二乘法分析PSD标定曲线,拟合直线如图6所示,拟合均方根误差δ=4.0777(偏大).图6显示两端线性度明显没有中间线性度高,其主要是由PSD的线性度误差引起.由于液位波动的幅度较小,所以对中间线性度较好的部分(-3~3 mm)再次拟合,拟合直线如图7所示.
拟合得到如下的直线方程:


图6 整个PSD输出电压平均值与液位的线性拟合曲线Fig.6 Linear fitting curve of output average voltage in all PSD and liquid level
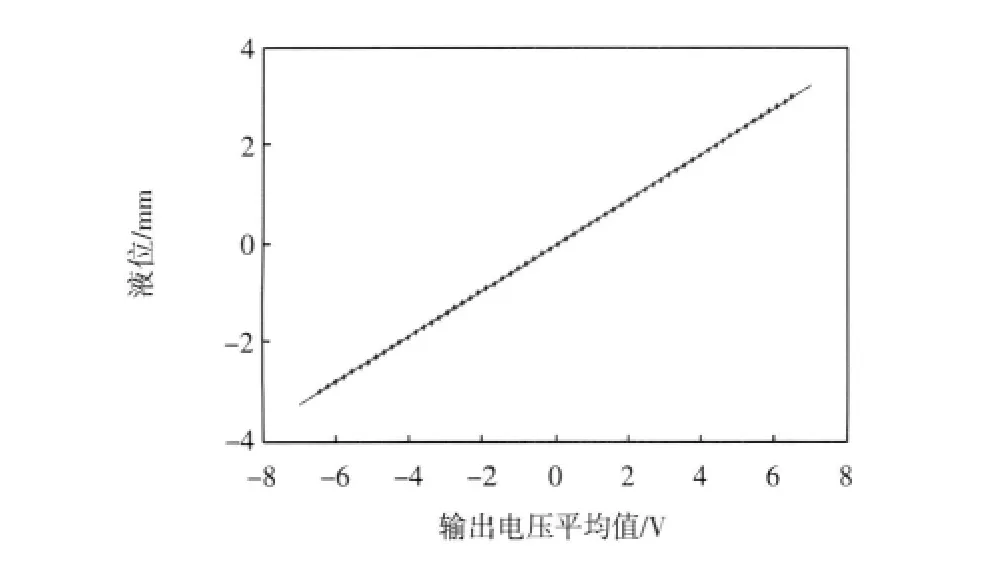
图7 -3~3 mm段输出电压平均值与液位的线性拟合曲线Fug.7 Linear fitting curve of output average voltage in-3-3 mm and liquid level
式中:x为输出电压平均值(V);y为液位高度(mm).其均方根误差δ=0.0046.
将标定所得的拟合直线方程代人到软件程序中,这样就可以将采集的电压信号直接转换为液面相对零位的液位差值,从而显示实际液位.
3.2 实验结果和误差分析
根据实验数据按标定方程(3)将计算液位的结果列入表1显示液位栏中,误差为拟合后的液位与实际液位之差.由实验数据可知,在PSD中心处的误差最小,往两端误差呈增长趋势,在-3~3 mm之间时,测量最大误差为20.653 μm,满足实验要求.
该系统中误差源有PSD的非线性误差、光路系统引起的误差、信号处理电路引起的误差、数据采集引起的误差等.其中PSD的非线性误差可以通过标定的方法消除,其他的误差在系统的设计和安装中应尽可能的减小.
4 结论
本设计构建了激光液位检测系统,由PSD液位检测系统和数据采集系统构成.实验结果表明:在量程为6 mm时,误差仅为0.34%,满足面曝光快速成形液位检测精度要求,已成功应用于面曝光快速成形系统.
本液位检测系统将一维PSD与信号处理电路集成有助于增强信号的抗干扰能力,提高检测精度;采用加反偏电压来消除背景光和暗电流的方法,操作简单;A/D转换芯片选用-10~+10 V的输入范围,方便数据采集;信号处理电路和数据采集电路都简单可靠;整个系统工作稳定且成本低廉,可应用于各种高精度的非接触激光液位检测中,具有广泛的应用前景.
[1]胥光申.用于高精度小尺寸零件制作的光固化快速成型技术的现状与发展[J].机械科学与技术,2004,23(10):1223-1225.
[2]CHOI Jaewon,WICKER Ryan B.Cure depth control for complex 3D microstructure fabrication in dynamic mask projection micro-stereolithograph[J].Rapid Prototyping Journal,2009,15(1):59-70.
[3]王大鹏.光纤成品油液位自动测量装置[D].哈尔滨:黑龙江大学,2008.
[4]任开春,涂亚庆.20余种液位测量方法分析[J].工业仪表与自动化装置,2003(5):12-16.
[5]李国哲,于清旭.基于光纤受抑全内反射原理的高精度液位传感器研究[J].仪表技术与传感器,2004(2):50-51,54.
[6]何勇,莫健华,范准峰,等.光固化快速成形中激光液位检测系统的设计[J].激光杂志,2007,28(4):79-80.
[7]李旷野.基于PSD的高精度位移传感器的研究[D].长春:长春理工大学,2010.
[8]游璞,于国萍.光学[M].北京:高等教育出版社,2008.
[9]莫伟.基于PSD的高速激光距离传感器的信号检测与处理[D].武汉:华中科技大学,2008.
[10]胡送桥.新型面曝光快速成形控制系统及系统软件研究[D].西安:西安工程大学,2010.