遥感卫星星上时间管理方法
2013-10-22田贺祥王同桓
田贺祥,王同桓,李 璇,徐 浩
(北京空间飞行器总体设计部,北京 100094)
0 引言
遥感卫星因具备高效和持续的探测能力等优势,已在资源普查与测绘、环境监测、农业水利等领域取得了广泛的应用。随着用户对卫星遥感数据高时间、高空间分辨率需求的不断提高,光学遥感卫星和微波遥感卫星均对星上时间精度和同步精度提出了更为苛刻的要求。以合成孔径雷达(synthetic aperture radar,SAR)遥感卫星为例,在高分辨率聚束模式工作期间,为了获取丰富精细的目标信息,高速运动的卫星将始终小范围地照射卫星预置的特定成像区域,这就要求预先设定的聚束模式工作时间起点与星上时间比对时刻严格同步,超出时间误差范围即可造成不可忽视的成像性能下降[1]。
本文以遥感卫星为对象,将时间管理定义为:为了满足用户对时间精度和同步精度的需求,通过特定方法和必要手段对星上时间产生、维护和发布机制进行相应的约束和规定[2,3],并实现用户对时间要求的完整过程称为时间管理。
1 星上时间管理模型
依据时间管理的定义,可建立遥感卫星星上时间管理模型,并将其分为4个组成部分,如图1所示。

图1 星上时间管理模型组成Fig 1 Constitution of satellite time management model
星上时间管理模型由时间源、时间维护、时间用户及时间传输通道组成。其中,时间源、时间维护和时间用户为逻辑关系层面,它涵盖了星上时间同步的基本流程,并直接揭示了卫星时间系统的功能实质;时间传输通道则承载了逻辑关系的传递。
1)时间源用于星上时间的产生并提供时间基准,它的执行设备为导航接收机、地面遥控注入及数据管理系统工作时钟等[4];
2)时间维护提供了时间修正的手段与方法,它的执行设备为数据管理系统、专用控制电路等,并以广播、点对点传输等方式实现时间发布;
3)时间用户则是时间维护和时间发布的对象,整个系统的最终目标即是为用户提供能够满足任务需求的星上时间,控制分系统、载荷、数传分系统及地面测控均可认为是时间用户,它们是时间管理的受益者;
4)时间传输通道提供时间信息流的传输路径,它的执行设备为硬件秒脉冲通道和串行1553B总线通道。
2 星上时间管理运行机制
对同步精度要求苛刻的时间用户,遥感卫星可采用高精度同步时间管理方法,它以导航接收机作为星上时间源,接收机锁定导航信号后的高精度硬件秒脉冲(导航电文与导航时间严格对应,输出的秒脉冲信号形式如图2所示)。信号和此刻的整秒时间信息为计时标准,其中,硬件的秒脉冲为时间用户提供了精确的校准时刻,整秒时间信息为时间用户提供了严格的维护信息。
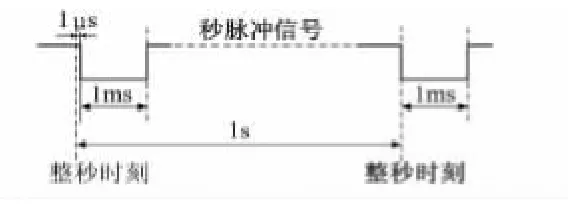
图2 秒脉冲时序图Fig 2 Pulses per second(pps)timing sequence diagram
首先需要导航接收机正常锁定导航信号,在整星指令控制下输出时间源产生的秒脉冲信号和其对应的绝对时间码信息。秒脉冲信号经过放大和分路处理后作为触发信号,通过专用电路发送给所有需要时间同步处理星上时间用户。绝对时间信息则通过总线发送到时间用户。时间用户以收到的秒脉冲信号为全系统授时起点,完成高精度同步。具体的时间管理运行机制步骤如下:
1)导航接收机作为时间源开机数分钟内,完成卫星定位和调整秒功能,此时秒脉冲信号和时间码数据有效可用,导航接收机锁定信号。
2)数据管理系统接收地面系统校时工作指令,并发送给所有需要时间同步的用户[5]。
3)导航接收机收到指令后,于下一秒输出一个与导航接收机整秒严格同步的脉冲信号,并锁定该信号的时间码信息,作为所有系统工作的起点时刻;秒脉冲信号由RS—422接口等组成的时间传输通道发送给时间用户[6]。整秒时间码信息则通过由1553B组成的时间传输通道发送时间用户,该步骤完成了时间维护和发布。
4)时间用户收到秒脉冲信号后,将记录各自的频率计数器清零,用自身时钟信号作为计数脉冲,作为系统时间;时间用户将接收到的时间码信息与计数器累积脉冲数相加,得到当前的时刻,最终完成高精度时间同步。
但当在高精度时间管理系统运行于故障模式,或时间用户对星上时间同步精度要求不高时,可由一般精度的时间管理运行机制所替代,其时间源也因此可以灵活选择,数管工作时钟和导航接收机自主产生的时间码等均可作为星上时间源。
遥感卫星一般精度时间管理的时间维护常用方式有授时和校时2种方法,具体分类方法如图3所示。星上时间差可以作为一般精度时间维护的依据,根据星上自主生成时间码与导航时间码的时标遥测信息,获取星上时间码与对应时刻的导航时间码之间的时间差。

图3 一般精度时间管理的时间维护Fig 3 Time maintenance of common precision time management
当星地时差差别较大时,一般采用授时方式对星时维护。星上时间授时的目的是调整星上时间计时零时刻的绝对时间。对于地面授时方法,卫星接收到地面授时注入数据后,将注入数据中给定的时间作为基准星上时间。当导航时间准确的情况下,也可以采用导航授时的方式进行时间维护,依据导航授时指令,数管计算机一次性将导航时间引入到星上时间系统中。
当存在较小的星地时差时,一般采用校时方式进行星上时间维护。按地面校时指令要求,在卫星星上时间的基础上,将星上时间增减一个要求的值,以校正星地时间的较小绝对误差,该方法称为地面集中校时。若地面确认导航数据长期稳定有效时,并且此时星上时间与导航时间秒值偏差在规定时间以内时,也可引入导航自主校时。
此外,为了调整由星上基准晶振偏差引起的星上时间积累偏差,可引入均匀校时,周期性地每经过相应的时间间隔,对卫星的星上时间增加或减少一个最小时间间隔,达到提高星上时间累计准确计时目的。
3 时间系统误差模型与分析方法
星上时间管理系统的主要误差源可以分为4类,如图4所示。

图4 星上时间系统误差源组成Fig 4 Constitution of error sources of satellite time system
由图4可知,星上时间系统误差源主要有:硬件时延误差、星时锁定误差、时钟抖动误差、用户校时误差等。其中:
1)硬件时延误差包括时间源产生误差、时基传递误差、整星器件延时。整星器件延时可以通过测试方法后进行校准。
2)星时锁定误差主要为星上FPGA锁存器锁定时间误差。
3)时钟抖动误差是一种随机误差,由基准时钟源所决定,主要取决于锁相倍频误差。锁相误差是由锁相环进行倍频时引起的,它是乘性放大误差,其他几种误差均为加性误差,若倍频因子为 N,高稳时钟精度为 τ0,则锁相误差τ1=Nτ0[7]。
4)用户校时误差为秒脉冲接收误差、用户计数器误差、用户自身使用软件算法时产生的不可忽略误差。图5举例给出了用户秒脉冲接收误差示意图。

图5 用户秒脉冲接收误差Fig 5 User pps receiving error
在图5中,Δ为导航接收机与国际时间标准比对时引起的误差。δ为用户本地采样信号确认低电平接收有效时引起的误差,该误差一般不超过秒脉冲下降沿持续时间。
根据以上各误差源在时间信息流的传递次序,可以建立星上时间系统的误差传递模型(如图6),误差模型建立的目的主要是为了能够涵盖误差传递的整过程,可根据不同型号卫星调整模型单元,估计出整星校时综合误差。由此可以针对不同的时间用户获得各自的整星时间系统同步误差。

图6 时间系统误差传递模型Fig 6 Error transfer model of time system
4 设计实例
某遥感卫星分系统对时间同步精度的需求为优于50 μs。
4.1 理论分析
根据设备工作参数与芯片手册可获取如下数据:1)秒脉冲由导航接收机产生,输出误差为1 μs;
2)控制分系统秒脉冲接收芯片固有传递延时最大为22 ns;
3)控制分系统星时锁存采用FPGA,最大延时为1 μs;
4)控制分系统晶振稳定度40×10-6(考虑初始精度误差和5a老化误差)。
根据时间系统误差模型,可得到各时间传递过程中各环节的误差为:
1)秒脉冲误差时间为τ2=1 μs;
2)时基传递误差主要由于星上芯片所引起,即τ3=22 ns;
3)星时锁存延时 τ4=1 μs;
4)控制分系统高精度校时时要加上下位机记录的相对时间,相对时间最大不超过1 s,则校时时的最大误差时间 τ5=40 μs。
以上可以分析得出下位机采用秒脉冲进行高精度校时的误差 τ=τ2+τ3+τ4+ τ5<43 μs,表明该方案符合时间同步精度优于50 μs的设计要求。
4.2 实验验证
测试方对卫星某分系统设备高精度时间同步性能开展测试实验,实验内容为秒脉冲校时时间同步精度测试。
实验结果如表1和表2所示。
测试结果表明:在相邻2个秒脉冲间,测量误差能够控制在30 μs以内(表 1),器件锁存时延范围为 25~45 μs(表2),由误差模型图6可知,器件时延属于可补偿误差,通过对该时延的补偿,可保证由此引起的时延小于10 μs,在此基础上,与控制周期的测量误差叠加,满足高精度同步精度为50 μs的设计要求。

表1 设备高精度校时测试数据Tab 1 Test data of high precision time correction of device

表2 器件锁存信号时延测量Tab 2 Time delay measurement of device latch signal
5 结束语
本文通过构建遥感卫星时间管理模型,实现了不同时间管理运行机制的统一,并在此框架下详细分析了经过在轨飞行验证的高精度同步时间管理和一般精度时间管理运行机制,用户可以根据需求选取合适的时间管理方法。同时,综合考虑影响时间同步精度的星上误差源,给出了星上时间误差传递模型。本文以50 μs的同步精度需求设计为例,采用理论分析和实验验证相结合的方式对时间管理模型进行了验证,结果表明:本文采用的时间管理方法和误差模型能够满足遥感卫星高精度时间同步的设计和分析需求,为遥感卫星星上时间管理的方法选取和方案设计提供了便利的条件。
[1] Carrara W G,Goodman R S,Majewski R M.Spotlight synthetic aperture radar signal processing algorithms[M].Boston,London:Artech House,1995:357 -496.
[2] 谭维炽,胡金刚.航天器系统工程[M].北京:中国科学技术出版社,2009.
[3] GJB 289A—1997数字式时分制指令/响应型多路传输数据总线[S].
[4] GJB 2994—1997航天器数据系统时间码格式[S].
[5] 谭维炽,顾莹琦.空间数据系统[M].北京:中国科学技术出版社,2004.
[6] 李新贝,谭 超,高 山,等.星上RS422接口电路的建模与仿真[J].航天器工程,2011,20(1):109 -113.
[7] Gardner F M.Phaselock techniques[M],New York:Wiley &Sons,2005.