一种非线性永磁同步电机调速系统
2013-10-17胡汉文牛志嘉石明全
胡汉文,牛志嘉,石明全
(1.电子科技大学机械电子工程学院,四川 成都 611731;2.电子科技大学航空航天学院,四川 成都 611731)
0 引言
近年来,电力电子技术发展非常迅速,电动机相关理论也得到了长足进步,永磁同步电动机在此背景下得到了快速的发展。目前,永磁同步电动机依托其使用寿命长、体积小、质量轻、转速高、可靠性高、散热性能良好和转动惯量较小等诸多优点,在很多领域都展示出了它强大的应用潜力。目前,永磁同步电动机的控制主要还是采用了线性的模型和控制方法,拓扑结构采用闭环结构,控制算法为传统的PI线性算法[1]。因此,永磁同步电动机可以视为是一种典型非线性系统,因为它具有非线性性。然而,传统的控制方式是一种线性的控制方式,控制性能较弱,不能满足较高控制性能的要求[2]。因此一种非线性的控制模型对永磁同步电机的控制设计和应用具有重要的意义。为此,引入空间矢量脉宽调制(SVPWM)这一概念,利用它对永磁同步电动机进行驱动,并结合非线性的控制方式,能够实现比目前大多所使用的传统控制方式更好的控制效果,系统响应速度快,控制过程没有明显超调现象,是一种高效的具有快速响应能力的永磁同步电动机的控制方法,具有良好的系统驱动性,并且在外部条件发生变化或者电动机某些参数改变的时候有高速跟随响应的能力,本文的主要工作就是讨论并验证上述算法的有效性和快速跟随性[3]。
1 基本原理
1.1 SVPWM 技术
SVPWM又称为空间矢量脉冲宽度调制,主要原理是通过PWM波调节系统逆变器电路功率开关的导通截止状态以及导通截止时间,从而形成磁链矢量[2]来追踪其准确磁链圆,合成相应的电压空间矢量,得到驱动永磁同步电动机运动过程的圆形旋转磁场,驱动电机转动。
1.2 三相电压型逆变器

图1 三相电压型逆变器结构图
图1所示为三相电压型逆变器结构图,其中,分别用VF1~VF6表示6个功率开关器件。工作方式上,逆变器采用上、下桥臂换流的工作方式,并且上、下桥臂不得同时开通。如果采用两两通电[4]的方式,则一共会存在6种工作状态。如图1所示,当功率管VF3和VF6同时导通时,电流就会由电动机的B相流入,经过电动机的C相流出。通过调节功率管的导通顺序可以控制逆变器的工作状态,每隔60度“电角度”切换一次逆变器功率开关状态,这样就能使它按照所期望的基本电压空间矢量U1、U3、U2、U6、U4、U5的顺序进行工作,这就是常说的典型的“六节拍”逆变器运动方式[5]。
1.3 电压空间矢量
当电动机的三相定子电压Ua、Ub、Uc分别作用在A、B、C绕组上时,将会得到3个电压空间矢量:Ua·ej0、Ub·、Uc·e。将它们进行空间矢量叠加后会形成一个总的空间电压合成矢量Us,该电压合成矢量在空间中与电动机保持相同的角速度旋转[6],为方便计算,引入α β O坐标,如图2所示。其中α轴与A轴重合,β轴滞后α轴90度。在α β O坐标系下,空间电压合成矢量Us可进行如下表示:

其中,Θ表示的是合成电压矢量与α轴间的夹角。

图2 α β O坐标下电压空间矢量的合成
通过基本的空间电压矢量合成只能产生正六边形的旋转磁场,如果想要得到圆形的旋转磁场,需要合成相邻两个基本空间电压矢量才能得以实现[7]。在电动机控制系统中,可以通过改变PWM波占空比来调节电动机相电压的大小。因此,在电动机运转过程中,需实时调节PWM波的占空比[8],控制逆变器功率开关的导通截止时间,从而实现电压空间矢量的线性组合,合成所需的任意电压空间矢量。
设Ux、Ux+60为相邻的两个基本空间电压矢量,Us为合成电压矢量。令基本空间电压矢量Ux、Ux+60的幅值为U,合成电压矢量Us与基本空间电压矢量Ux的夹角为θ。如图3所示。

图3 电压空间矢量的合成
由电压合成公式可知:

其中,t0,t4表示插入零向量的时间,t1与t2分别表示作用在相邻基本空间电压矢量Ux、Ux+60的导通时间。
若控制器采用中心对称的PWM模式,则有:

1.4 闭环调速的原理
永磁同步电动机速度控制器设计的关键是速度的快速跟随性能,调速系统需根据给定速度的变化迅速做出响应,使得输出速度能快速准确地跟踪系统的给定速度。对于开环调速系统[9]来说,会存在以下的两个问题:(1)当电机以全电压方式启动时,由于启动电流很大,会造成巨大的电流冲击;(2)转速随负载的变化而变化,而且负载越大,转速的降落就越大,远远地偏离系统的给定速度,不满足当负载变化时转速稳定要求[10]。为了降低开环调速系统带来的影响,本文提出带转速负反馈的闭环调速系统,通过实时转速与系统给定速度之间的偏差来自动调节PWM波的比,控制逆变器功率开关的导通截止时间,从而实现通过调整输出电压来达到保持稳定的输出转速目的。
由于系统速度调节响应非常快,如果摄入了微分因子,系统就会产生速度环振荡,而且传统的PI控制算法不能有效地解决系统快速响应性与系统超调之间存在的矛盾,因此本文采用非线性PI控制算法完成对速度控制器的设计。
非线性PI控制算法是根据系统输出偏差e的大小来实时生成函数KP(e)[11],并用KP(e)来代替常规PI控制器的比例系数KP。
构造系统PI非线性函数的形式为:

系统对比例参数KP的要求较高,在系统响应过程中,比例参数KP直接决定了系统响应时间和系统超调两项重要性能[12]。在系统响应初期,由于系统误差较大,为加快系统响应速度,需施加较强的比例控制;在系统响应末期,较强的比例控制会带来较大的系统超调,严重时会引起系统出现震荡,此时,需减小比例调节,抑制系统超调。
2 系统仿真测试
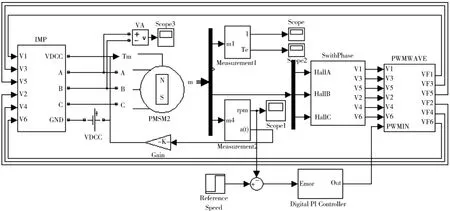
图4 闭环调速系统仿真原理图
在图4的永磁同步电机闭环调速系统仿真图中,包含三相电压型逆变器、永磁同步电机、转速调节器、PWM发生器以及示波器等模块。
在闭环调速系统中,需要根据实时三相霍尔信号[13]的状态来控制图4中V1~V6的导通截止状态。一般为便于分析,将V1~V6的导通状态记为数字1,截止状态记为数字0。
在闭环调速系统中,系统给定的转速为4000rpm,仿真的开始时间为 0.0s,终止时间为 0.5s,采用ode45算法[14]进行仿真,结果分别如图5、图6及图7所示。

图5 电动机三相绕组电流波形
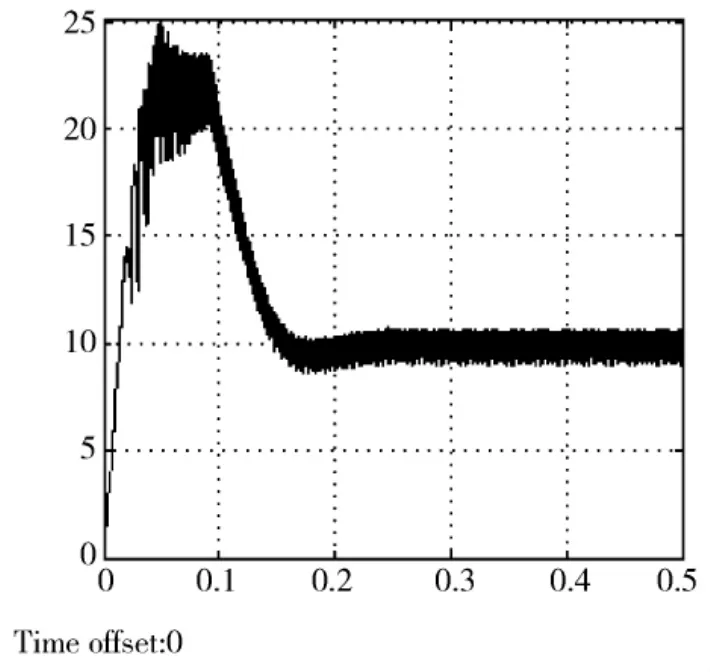
图6 电动机输出电磁转矩波形
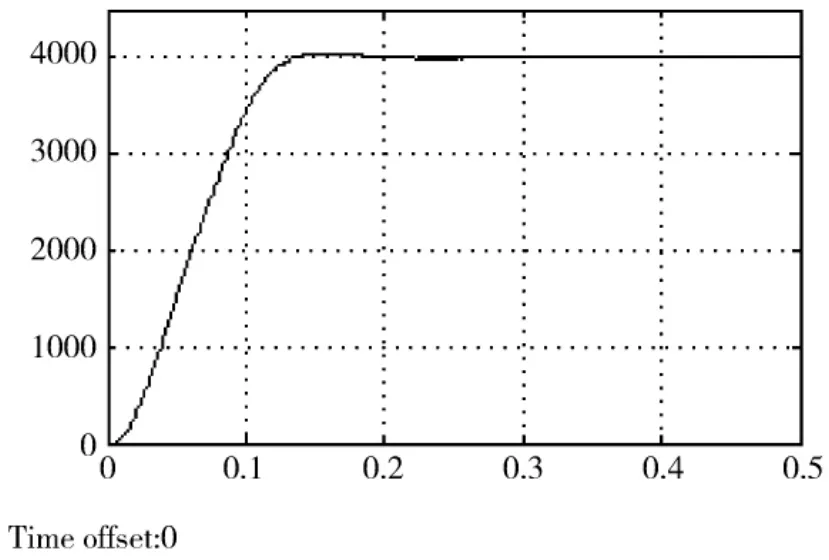
图7 电动机转速曲线
由图5、图6及图7可以得到:当电动机启动的时候,转速开始急剧上升,当运行到0.15s时输出转速基本上能够稳定在4000rpm;在0s~0.15s之间,电动机三相绕组电流变化不稳定,而且电动机输出电磁转矩变化较大;当进行到0.15s时,电动机三相绕组电流近似以正弦曲线变化,而且电动机输出电磁转矩[8]变化较小。
3 结束语
本文采用空间矢量脉宽调制(SVPWM)技术实现电动机驱动,通过单闭环的控制策略与非线性PI结合变速积分的控制算法完成了控制器的速度调节,通过仿真测试,当系统运行到0.15s时,输出转速基本上稳定在系统给定的转速4000rpm,电动机输出电磁转矩变化较小,电动机三相绕组电流近似以正弦曲线变化,系统响应过程快速且无明显超调,有效地抑制了电动机运行过程中产生的电磁转矩脉动,验证了调速系统在电动机运行中的有效性。
[1]朱耀忠.电机与电力拖动[M].北京:北京航空航天大学出版社,2005.
[2]刘攀银.永磁同步电机伺服系统设计及应用研究[D].成都:电子科技大学,2008.
[3]贺益康,严岚.永磁无刷直流电机稳态特性的状态空间分析[J].电工技术学报,2002,17(1):17-22.
[4]刘会飞,王淑红.无刷直流电动机转矩脉动的抑制[J].电力学报,2006,21(2):157-159.
[5]杨贵杰,孙立,崔乃政,等.空间矢量脉宽调制方法的研究[J].中国电机工程学报,2001,21(5):79-83.
[6]陈伯时.电力拖动自动控制系统(第3版)[M].北京:机械工业出版社,2005.
[7]张强,任一峰,林都,等.空间矢量脉宽调制算法(SVPWM)的原理及其仿真研究[J].电气技术,2010(6):35-37,40.
[8]姚伯威,孙锐.控制工程基础[M].北京:国防工业出版社,2004.
[9]孙磊.基于DSP的三相电压型整流器研究[D].杭州:浙江大学,2007.
[10]周渊深,等.交直流调速系统与MATLAB仿真[M].北京:中国电力出版社,2007.
[11]宋海龙,杨明,范宇,等.无刷直流电动机的无位置传感器控制[J].电机与控制学报,2002,6(3):208-212.
[12]李强.无位置传感器无刷直流电动机运行理论和控制系统研究[D].南京:东南大学,2005.
[13]周波,魏佳,穆新华,等.反电势逻辑电平积分比较法实现的无刷直流电机无位置传感器控制[J].电工技术学报,2000,15(4):5-9,4.
[14]李人厚.智能控制理论和方法[M].西安:西安电子科技大学出版社,1999:33-35.
