一种减小混合箝位多电平逆变器母线电容冲击电流的PWM控制方法
2013-10-17何原明何湘宁
谭 成,何原明,赵 菁,何湘宁
(浙江大学 电力电子技术国家专业实验室,浙江 杭州 310027)
0 引言
多电平逆变器因其开关器件耐压要求低、承受的du/dt小、输出电压的总谐波畸变率低、电磁干扰小等特点,在工业中具有广阔前景,成为研究热点。混合型多电平拓扑是在二极管箝位型[1-2]、飞跨电容型[3-4]和级联型[5-6]这 3 种经典的多电平拓扑的基础上发展起来的一类新型多电平拓扑[7-10]。这类拓扑能够克服经典多电平拓扑的不足,并具有新的特点。
文献[7]提出的混合箝位拓扑通过系统中增加悬浮电容的方式平衡了直流母线电压,克服了二极管箝位拓扑需要复杂的控制方式才能够平衡母线电容电压的缺点[11-14]。文献[8]中的拓扑以飞跨电容三电平拓扑为基本单元,采用级联的方式将其连接,构成了电容箝位型混合拓扑。文献[9]采用了二极管箝位三电平拓扑为基本单元,以级联的方式构成了新的混合型多电平拓扑。文献[6]提出的一种混合箝位多电平拓扑将二极管箝位型和飞跨电容型多电平拓扑进行了有机结合。由于通过硬件改进实现了直流母线电容电压自动平衡,该拓扑可节省控制芯片的资源,降低了对控制芯片的要求。该拓扑还具有倍压输出的功能,即输入电压仅为输出电压的1/2,这样可以减小输入侧变压器的成本。在器件数量方面,文献[6]所提的拓扑与传统的五电平二极管箝位拓扑相比,减少了6个箝位二极管;与五电平飞跨电容拓扑相比,减少了5个电容;与级联型拓扑相比,该拓扑对输入侧变压器的要求较低,有利于降低成本。当该拓扑拓展至更高电平时,不需增加复杂的控制方式便能够实现母线电容电压平衡。由于该拓扑能够实现电压电流四象限运行,所以适合多种应用场合。
在对文献[6]的拓扑进行实验中发现,采用通用控制方式[15]时,直流母线电容存在幅值较大的冲击电流。这将严重影响电容的寿命,增加系统损耗,降低系统的可靠性。本文通过对混合箝位型多电平拓扑工作原理的探究,寻找到产生冲击电流的原因,提出一种改进的三相PWM控制方法,可有效减小冲击电流的幅值。通过数学计算求得控制方式中的最优组合,可将冲击电流降至最低。通过Saber工程软件仿真和搭建样机验证了改进控制方式的有效性。
1 混合箝位型多电平逆变器拓扑
1.1 基本结构
图1为文献[6]提出的混合箝位五电平逆变器拓扑,图中Udc表示一个直流母线电容所承受的电压。单相拓扑包括电容电压平衡电路和四电平二极管箝位电路。在三相系统中,每个桥臂共同并联至相互串联的2个直流母线电容。
电容电压平衡电路部分包括6个箝位开关管和3个悬浮电容。箝位开关管可以分为2组,VTc2、VTc4、VTc6属于组Ⅰ,VTc1、VTc3、VTc5属于组Ⅱ。相同组的开关管控制信号完全相同,不同组的箝位开关管控制信号互补:如果组Ⅰ的开关管导通,则组Ⅱ的开关管关断,电容电压平衡电路处于状态A;如果组Ⅱ的开关管导通,则组Ⅰ的开关管关断,电容电压平衡电路处于状态B,见图1。在状态A中,平衡电路的4个输出端 ① — ④ 可以输出 +2Udc、+Udc、0 和 -Udc;在状态B中,平衡电路的4个输出端可以输出+Udc、0、-Udc和-2Udc。2种工作状态交替即形成了五电平输出。
四电平二极管箝位电路由6个箝位二极管VD1—VD6、6个主功率输出开关管VT1—VT6和3个悬浮电容组成。根据文献[16],每次有相邻3个主功率输出开关管导通,且 VT1与 VT4、VT2与 VT5、VT3与 VT6这3对开关管的控制信号互补。箝位电路能够将每个器件箝位至直流母线电容电压Udc,也能够为正向或负向电流提供通路。

图1 混合箝位型五电平逆变器三相桥臂拓扑Fig.1 Topology of three-phase hybrid-clamped five-level inverter
1.2 PWM控制方式
调制方式采用的是文献[15]提出的混合箝位拓扑的通用控制方式。图2为主开关VT1、VT2、VT3和箝位开关管VTc1的载波波形,um代表调制波。与传统PWM控制[17]的载波形态不同,在通用调制方式中,每个开关器件的调制波位于2个载波带。对于箝位管VTc1的载波,其载波处于非相邻的2个载波带,所以产生了载波过渡线段AB和CD。若调制波与载波过渡线段相交,则箝位开关管会发生一次状态改变,电容电压平衡电路的工作状态也会相应改变。
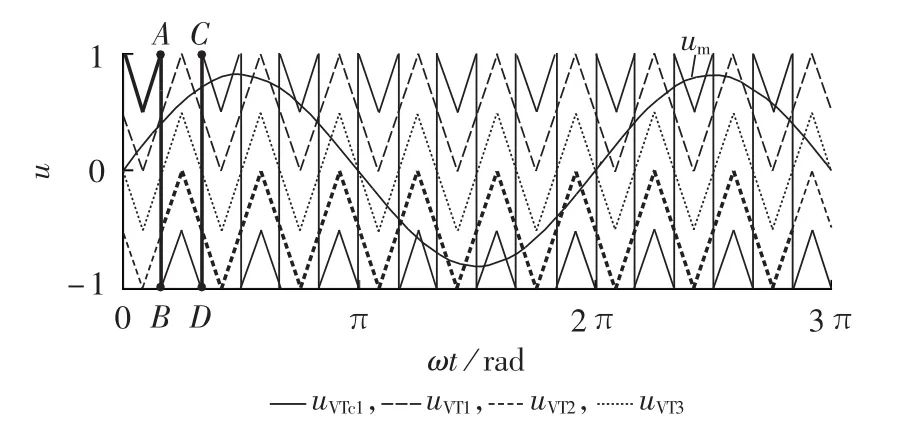
图2 混合箝位五电平拓扑单相载波波形Fig.2 Single-phase carrier waveform of hybrid-clamped five-level inverter
图3为采用通用调制方式时,三相桥臂箝位开关管的载波波形(uVTc1A、uVTc1B和uVTc1C)及其控制信号,umA、umB和umC分别表示A相、B相和C相的调制波。可以看到,由于三相箝位管的载波相位相同,它们的载波过渡线段位置也相同,当调制波与载波过渡线段相交时,三相箝位开关管会同时发生状态改变。如图3底部的箝位管控制信号,“3”表示在同一时刻三相箝位开关管同时发生动作。

图3 三相箝位管的载波波形、控制信号和“动作重叠时刻”产生示意图Fig.3 Carrier waveforms of three-phase clamping switches,control signals and overlapping time
1.3 混合箝位多电平拓扑的电容电压自平衡
混合箝位多电平拓扑因为其电容电压平衡电路可以自动实现直流母线电容电压平衡,而不需要复杂的控制方式。
以单相情况下的电容C1为例。假设系统已处于稳定工作状态,直流母线电容和悬浮电容的电压均为Udc,且电压平衡电路在状态A,系统通过③端经四电平二极管箝位电路输出+Udc。这样,C1与C4并联,共同为负载提供能量。能量输出造成C1的电压下降,而此时其他电容因为不处于能量输出回路,而保持电压不变或通过直流母线充电而略微上升。状态A与状态B交替出现,所以在下一时刻,电压平衡电路通过箝位管的状态改变而进入状态B。在状态B中,C1与C3并联,两者会发生电荷转移,以保证电容两端电压相等且直流母线将对C1充电。如此,虽然C1的电压有升有降,但在一个周期内,实现了电压的动态平衡。拓扑中其他电容电压的平衡原理相同。
2 直流电容冲击电流的产生机理
2.1 通用调制方式下单相系统中直流母线电容的冲击电流
通过上文分析,电容电压平衡电路通过改变电容的并联方式,可以实现电压的动态平衡。然而,在并联的过程中,电荷需要在短暂的时间内完成转移,因而产生了冲击电流。这种电流频率高、幅值高,当流经电容后,会使电容发热情况加重,大幅降低了电容的使用寿命,也降低了系统的可靠性。
首先分析单相系统中流经直流母线电容的冲击电流。图4为电容C1、C3、C4的电压和流经电容C1的电流。当箝位管VTc1的控制信号ugVTc1由低变高时,表示组Ⅱ的开关管由关断转为开通,电路转为状态B,电容C1与C3发生并联动作。并联后,由于两者电压不同,会产生冲击电流,以实现电荷转移。可以明显看到,当电容C1与电容C3的电压相差较大时,冲击电流的幅值也会增大;而当两电容电压相差较小时,冲击电流也会减小。
由于C1与C3并联时,C1的电压高于C3,所以两者并联时C1放电,产生正向的冲击电流;C1与C4并联时,C1的电压低于C4,两者并联时C1被充电,产生负向的冲击电流。所以,如果能够减小电容的电压纹波,那么悬浮电容和直流母线电容的电压差值会减小,冲击电流也会减小。
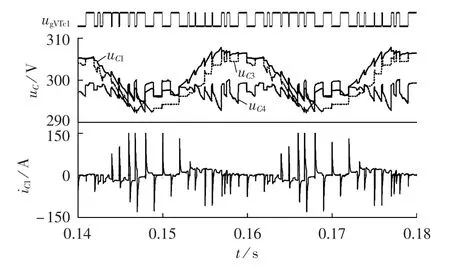
图4 单相系统电容 C1、C3、C4电压和 C1电流Fig.4 Voltage across C1,C3and C4,and surge current through C1in single-phase system
2.2 通用调制方式下三相系统中直流母线电容的冲击电流
由2.1节的分析可知,发生并联的电容电压差值是影响冲击电流大小的重要因素。如果能够减小电容之间的电压差值,就可以有效地减小冲击电流。
图5为三相系统中,电容C1与A相悬浮电容C3A的电压纹波和流经电容C1的电流波形。可以看到,C1和C3A的电压差与图4相比明显减小,流经电容C1的电流幅值与图4中的电流幅值相比也明显减小。这是因为与单相系统相比,三相系统有3个桥臂的悬浮电容,直流母线电容被箝位的次数增加,所以电压的波动减小,冲击电流的幅值也随之减小。

图5 三相系统电容C1、C3A电压和C1电流Fig.5 Voltage across C1and C3Aand surge current through C1in three-phase system
通过对电容电压平衡电路的分析可知,当调制波与箝位开关管的载波相交,箝位开关管发生动作,会使母线电容被悬浮电容箝位。在调制波与箝位开关管载波相交的时刻中,有些时刻只有某一相的箝位管发生动作,而另外某些时刻,有两相或者三相的箝位管同时发生动作(见图3),后者称之为“动作重叠时刻”。在一般控制方式下,由于每相箝位管的载波完全一致,特别是当调制波与载波过渡线段相交时,产生了大量的“动作重叠时刻”,这使得三相系统中直流母线电容被悬浮电容箝位的次数减少,增加了电容充电或放电的时间,进而增加了母线电容与悬浮电容的电压差,导致产生过高的冲击电流。
图3说明三相系统中,采用通用调制方式时,会产生大量的“动作重叠时刻”。
3 改进的PWM控制方法
3.1 改进的PWM控制方法原理
由于通用调制方式中重叠的载波过渡线段产生了大量“动作重叠时刻”,改进的PWM控制方式更改了B、C相的载波过渡线段的位置,以减小“动作重叠时刻”的数量。图6为采用改进PWM控制方法后,三相系统中“动作重叠时刻”发生的次数。可以看到,尽管箝位管的载波形态没有发生改变,但由于B、C相的载波初始状态与A相载波不同,使得在同一时刻下,三相载波不再相同,三相的载波过渡线段也不再重合。这就避免了“动作重叠时刻”的大量产生。

图6 三相系统采用改进的PWM控制方法后“动作重叠时刻”示意图Fig.6 Overlapping time generated by improved three-phase control method
改进的PWM控制方式以A相箝位管载波过渡线段为参考,B相和C相的箝位管载波过渡线段可以设置与A相载波过渡线段相差某个相位以减少“动作重叠时刻”的数量。这样,在每一时刻,仅有某一相的箝位管动作,即一相的悬浮电容箝位母线电容,母线电容被箝位的次数增加,电容电压更接近Udc,电压纹波降低,冲击电流也会得到限制。图4中有12个动作重叠时刻,每个时刻均有三相箝位管一起动作,即如果与理想情况(每次只有一相箝位管动作)相比,通用调制方式下直流母线电容被箝位的次数少了30次。而图6中,在采用改进的控制方式后,在相同的时间内只产生了6个“动作重叠时刻”,每个时刻只有两相箝位管一起动作,直流母线电容被箝位的次数比理想情况少了6次,即改进的控制方式可以明显增加母线电容被箝位的次数。
图7为三相系统中,采用通用调制方式和改进调制方式时流过C1的电流,在改进调制方式中,B相箝位管的载波过渡线段与A相的相差200 μs,C相箝位管的载波过渡线段与A相的相差500 μs。由于拓扑的对称性,文中只以母线电容C1为例。可见,采用改进调制方式后,流过C1的电流减小至100 A以下,说明改进调制方式能够有效减小冲击电流。

图7 不同调制方式下流经C1的冲击电流Fig.7 Surge current through C1 by different control methods
3.2 改进控制方式的最优计算
首先,以A相载波过渡线段为时间基准参考,将B相载波过渡线段与A相载波过渡线段的相位差定义为“pdAB”,将C相载波过渡线段与A相载波过渡线段相位差定义为“pdAC”。随着pdAB和pdAC的变化,B相和C相的箝位管控制信号将发生变化,“动作重叠时刻”的数量也将随之改变。
由于对pdAB和pdAC进行恰当的选择可以减少“动作重叠时刻”发生的数量,增加母线电容被箝位的次数,减小电容电压纹波,最终减小冲击电流,所以需要寻找到最优的pdAB和pdAC的组合值,当B相、C相箝位管载波与A相箝位管载波的相位差为此最优值时,“动作重叠时刻”的发生次数最少,母线电容能够获得最多的箝位次数,冲击电流也最小。
根据上文的分析,电容并联方式的更改导致了冲击电流的产生。前一次并联动作产生的冲击电流没有消失之前,不可以发生第2次电容并联动作,否则会导致2次冲击电流叠加,产生幅值更大的冲击电流,所以两相箝位管载波过渡线段的时间差必须要大于某个时间长度。假设混合箝位多电平系统中的直流母线电容容值为2 000 μF,如果线路的寄生电阻约为50 mΩ,冲击电流的峰值会达到100 A,这样需要数十微秒的时间让冲击电流降至10%以下。所以直流母线电容2次被箝位的时间间隔可以设置在90 μs左右,以满足以上要求。另外,如果载波频率为fc,那么pdAB和pdAC的值均不能超过1/fc。
本文载波频率为1000 Hz,当考虑以上几点要求后,以100 μs为pdAB和pdAC的变化增量。通用调制方式即为pdAB=pdAC=0 μs的情况。为寻找到可以将冲击电流降至最小的pdAB、pdAC值,采用了Mathematica工程数学软件。pdAB和pdAC从0 μs变化至 900 μs,以 100 μs等距递增,共有 100 种不同的相位差组合方式,利用Mathematica编程求取每种组合下“动作重叠时刻”发生的次数。最优的pdAB和pdAC组合值对应的“动作重叠时刻”总数最少。
图8为计算一种组合A相与B相之间所产生的“动作重叠时刻”次数的程序流程图。图中,tA记录了A相箝位开关管的动作时刻,tB、tC记录了B相、C相箝位管的动作时刻,θ为B相与A相的相位差。对每相时间数据进行比较,如果2个时刻的时间间隔小于设定的阈值,则说明产生了一次“动作重叠时刻”,并记录此时刻于nA,C相与A相之间的“动作重复时刻”计算方法与此相同,同时三相箝位管同时动作的时刻只记作一次“动作重叠时刻”。最后在Sum中记录了该组合情况的“动作重叠时刻”总数。

图8 计算A相与B相存在的“动作重叠时刻”的程序流程图Fig.8 Flowchart of calculation of overlapping time between phase A and B
图9为计算结果。当 pdAB=0.4 ms、pdAC=0.7 ms时,发生的“动作重叠时刻”次数最少,为1次。
4 仿真与实验验证
为了验证改进PWM控制方式的可行性,本文利用Saber工程软件仿真,并搭建实验样机进行实验。实验与仿真参数相同,如下:调制比M=0.85,载波频率fc=1000 Hz,基波频率f0=50 Hz,直流侧电压为1200 V,阶梯期望电压为300 V,阶梯数为5,直流母线电容为 2200 μF,悬浮电容为 2200μF,每相负载(星形)为 23 Ω。

图9 “动作重叠时刻”计算结果Fig.9 Results of overlapping time calculation
仿真中采用 pdAB=0.4 ms,pdAC=0.7 ms,即 B相箝位开关管载波过渡线段与A相相差0.4 ms,C相载波过渡线段与A相相差0.7 ms,仿真结果由图10给出。与图5采用通用调制方式的C1电压、电流相比,图10中的电容电压最高值由大于305 V降低至303 V,波动更小;冲击电流正向峰值由135 A降低至38 A,减少了71.9%;负向峰值绝对值由140 A降低至42 A,减少了70%。

图10 采用改进控制方式和最优相位差组合后C1的电压、电流仿真波形Fig.10 Simulative waveforms of voltage across C1and surge current through C1under improved control and optimal combination of phase differences
图11为采用改进控制方式和最优相位差组合后电容C1的电流实验波形。与图12中采用通用调制方式相比,冲击电流的正向峰值由21 A降低至12 A,负向峰值绝对值由75 A降低至20 A,减小幅度分别为42.9%、73.3%。可以看到,改进控制方式有效地抑制了冲击电流的幅值。
改进控制方式对输出的相电压、线电压的谐波含量没有造成影响。图13为实验C相电压输出波形。在文献[10]中,调制比为0.8时输出相电压的THD为38.7%,采用改进PWM控制方式后,输出相电压的THD为35.6%。
另外,搭建的实验样机中的线路寄生参数(如杂散电感等)会对冲击电流有抑制效果,所以实验结果比仿真结果有所减小。但是混合箝位型多电平系统通常应用于中高压的工业环境中,为了减少损耗,系统的线路寄生参数会设计得尽量小,此时实验结果会更趋近于仿真结果。仿真结果与实验结果均表明,改进PWM控制及其最优组合较好地减小了流经直流母线电容的冲击电流。

图11 采用改进控制方式和最优相位差组合后C1的电流实验波形Fig.11 Experimental waveforms of surge current through C1under improved control and optimal combination of phase differences

图12 三相系统流过直流母线电容C1的电流实验波形Fig.12 Experimental waveforms of surge current through C1for three-phase system

图13 C相输出电压、CA线电压实验波形Fig.13 Experimental waveforms of output voltage of phase C and line voltage of phase CA
5 结论
本文针对混合箝位多电平拓扑提出了一种改进的PWM控制方式,对抑制流过母线电容的冲击电流有明显的效果。在此基础上,通过数学计算求得了最优的组合方式,使得母线电容获得最多次的被箝位机会,从而将冲击电流限制至最小值。此种控制方式适用于含有悬浮电容的混合箝位多电平拓扑。仿真和实验结果均表明改进PWM控制方式有效地降低了流经母线电容的冲击电流,从而降低了系统的损耗,延长了电容的寿命,进而提高了系统的可靠性。