基于反射内存网的通用航电仿真平台设计
2013-10-17白曦,张鹏
白 曦,张 鹏
(中国航空工业西安航空计算技术研究所第8研究室,陕西西安 710119)
传统的航电仿真平台存在以下问题:(1)专用性。特定的仿真计算机需搭载特定的模拟器,两者需要一一对应;仿真器的专用性,需针对不同的物理系统开发仿真系统,费时费力,容易造成资源的浪费,同时不利于仿真系统的扩展和维护。(2)仿真实时性差。为保证实时性,仿真平台增加了系统设计和实现的复杂度,不利于系统的扩展与维护[1-2]。
文中基于实时反射内存网技术,完成通用航电系统仿真平台的设计,解决了航电系统仿真平台专用性限制和仿真实时性差的问题。
1 反射内存网技术简介
通常在搭建仿真平台时,采用以太网技术。但由于以太网技术无法确保通信的确定性和实时性,因此不能直接用于实时仿真系统,需依靠软件手段提供一定的服务保证机制以确保通信的实时性,这便增加了仿真系统设计和实现的复杂度。
反射内存网(RFM网络)是一种新的网络通信技术,支持环形/星形拓扑,通过硬件实现数据的高速复制,为多机系统建立分布式共享内存结构提供支持。其优点是高速、实时、确定性、高吞吐量和低误码率,实时数据传输时延≤700 ns,上述特点适用于实时系统的构建和仿真。
2 通用航电系统仿真平台分析与设计
2.1 系统分析
通用航电系统仿真平台[3]应提供以下基本功能和性能要求:(1)应为任务系统软件的调试提供平台,提供模拟量信号、离散量信号和模拟视频等信号。(2)应支持半实物仿真,将航电设备连接在仿真系统中,使仿真更接近真实情况,提高系统仿真的逼真度和仿真试验结果的置信度。(3)应支持全数字仿真,采用数学、语言描述系统,并编写程序在计算机上对实物进行研究。(4)软件应采用模块化开放式软件架构,实现对各仿真模块的功能封装,将仿真软件划分为一系列相对独立的软件。(5)软件应具有实时多任务处理功能,对仿真模型进行周期调度,周期长度可动态设置,缺省情况下必须满足RS422总线刷新周期。(6)软件部署具有适应性和可伸缩性,航电系统的多个组成软件可视需要部署在不同的仿真计算机上,并可随意增减工作站,灵活调整系统规模。
基于上述需求,文中将通用航电系统仿真平台划分为实物子系统、接口子系统和仿真子系统,如图1所示。其中实物子系统是由航电设备构成的物理子系统,用于半实物仿真。接口子系统是一个特殊的接口转换单元,用于连接实物和仿真子系统,实现物理接口的连接和不同接口协议间的转换,并用于半实物仿真。仿真子系统由普通的工控机/PC机组成,是仿真进行的基础运行环境,支持仿真模型的运行和管理,同时用于半实物和全数字仿真。

图1 航电仿真系统组成示意
其中,实物子系统不是必须部分,在整个航电系统开发的生命周期内,可根据需要进行添加或删除,接口子系统和仿真子系统是通用仿真航电系统的基础部分,每个具备地面全数字仿真和地面半实物仿真能力的平台必须拥有。
2.2 系统设计
通用航电系统仿真平台系统架构如图2所示。
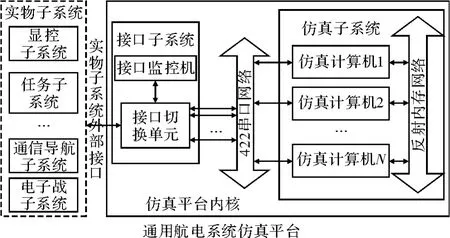
图2 通用航电系统仿真平台系统
通用航电系统仿真平台由实物子系统和仿真平台内核组成[4]。实物子系统包括:任务子系统、电子战子系统、通信导航子系统及显卡子系统等,实物子系统可根据半数字仿真需要选用;仿真平台内核由接口子系统和仿真子系统组成,仿真平台内核采用分布式仿真架构,包括硬件基础平台和仿真系统软件两部分,如图3所示。
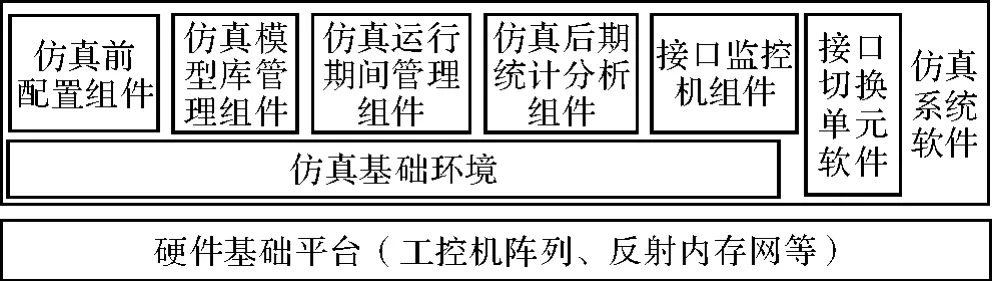
图3 仿真平台内核仿真系统软件架构
硬件基础平台由装配有反射内存卡的标准工控机阵列组成,互连网络为反射内存网,网络拓扑结构为星形或环形网络。工控机阵列通过反射内存卡组网构成多机分布式共享内存结构。仿真子系统与接口子系统间通过标准RS-422串行通信总线互连。工控机用于模型仿真和数据转换。接口切换单元是一个嵌入式计算机模块,其IO接口模块硬件架构采用开放体系结构,接口支持PCIE标准接口,支持插入常见的AFDX、FC、1394等航电系统通信接口,该架构具备较强的扩展能力。
仿真系统软件包括:仿真基础环境、仿真模型库管理组件、仿真前配置组件、仿真运行期间管理组件和仿真后期统计分析组件、接口监控机组件和接口切换单元软件。
仿真基础环境是一个基于QT开源UI框架的仿真集成开发环境,用于集成其他功能组件。仿真库管理组件支持对仿真模型进行增删和查改操作,其目前支持的航电系统仿真模型如表1所示。
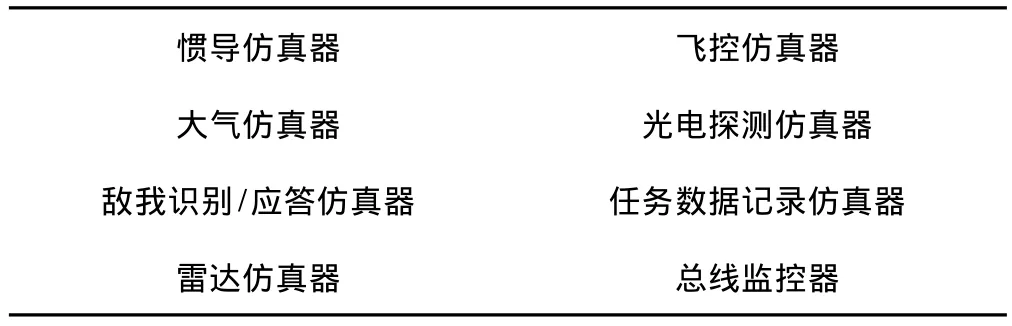
表1 航电系统仿真模型
仿真前配置组件用于配置、生成仿真蓝图,该蓝图用于指导仿真的进行并作为仿真期间运行管理组件的输入。仿真蓝图以XML文件存在,其配置参数包括:(1)仿真构型参数,配置参与仿真实验的各系统为仿真系统或真实系统。(2)参数初始值设置,包括物理环境参数、飞机飞行参数和战术环境参数。(3)监控参数选择,如图4所示。

图4 仿真蓝图结构
仿真运行期间管理组件以仿真蓝图为输入,启动运行仿真模型,对仿真过程进行监控和调度,完成预定的数据采集任务,并实现串口-反射网通信协议转换和在线参数更改功能。基本流程为:(1)从指定配置文件载入任务配置数据。(2)根据任务配置数据,初始化物理环境参数、战术环境参数和飞机飞行参数,完成这些参数的设置和初始化界面显示。(3)根据任务配置数据,设置物理环境参数、战术环境参数和飞机飞行参数的初始值。(4)按照仿真构型设置,向综合接口装置发送指令,设置系统仿真构型。(5)按照仿真构型设置,设置和显示对应的航电系统仿真监控界面和参数修改界面。(6)按照仿真构型设置,加载对应的航电系统仿真模型。(7)启动加载的各系统模型,开始仿真试验。
仿真后期统计分析组件,支持对数据的分析、统计操作和仿真过程的重演。
接口监控机组件用于生成接口映射配置数据、向接口切换单元烧写配置数据、监控并实时采集通信数据。接口映射配置数据用于建立仿真子系统串口与实物子系统接口间的映射关系。采用配置数据接口映射可实现仿真子系统和实物子系统间的解耦,提高系统仿真的灵活性。表2是一种仿真构型的接口-串口映射关系示例。

表2 实物子系统接口与串口映射关系示例
接口切换单元软件包括:接口映射配置数据、协议转换软件和监控软件,均固化在接口切换单元上,固化工具为接口监控机组件附带的烧写工具。接口切换单元在通电后,首先读取接口映射配置数据,完成协议转换软件的初始化。然后进入就绪状态,当有消息到达时,协议转换软件将立即启动,完成对消息的校验、缓冲、转换和转发功能。
在仿真阶段,仿真计算机上驻留着一个或多个航电设备仿真模型,每个航电设备模型对应一个仿真设备。仿真模型通过对特定设备输入输出和行为的模拟实现对物理设备的仿真。在仿真进行阶段,仿真模型通过工控机将数据写入到本地反射内存,反射内存硬件通信协议进行实时广播,其他工控机节点的反射内存卡数据将实时更新。此外,每台工控机上有仿真运行环境软件,负责仿真模型管理、仿真管理和仿真数据的统计分析。
3 仿真系统原型系统测试
基于文中的设计思想,设计并实现了仿真系统原型,搭建了测试环境对其功能性能进行了验证。测试环境包括:(1)硬件环境:1台航电系统任务计算机和1台显控计算机(用于仿真实物子系统)+3台PC机(其中2台用于仿真子系统运行,1台用于接口子系统运行)+1台接口切换单元设备。(2)软件环境:WindowsXP操作系统+仿真系统软件内核软件。(3)网络环境:反射内存网+422串口网络。(4)测试软件部署,如图5所示。
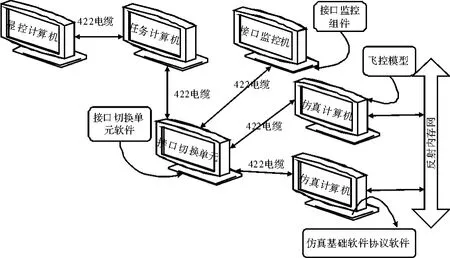
图5 仿真系统软件测试环境示意
通过搭建半实物仿真环境,观察仿真运行期间管理组件的参数监控界面输出、接口监控组件的参数监控界面输出以及显控计算机的操作指令,发现数据刷新和显控指令基本一致,表明系统的功能正确,该设计方案合理。图6、图7是参数监控界面输出截图。

图6 飞控模型参数监控输出快照

图7 接口监控组件参数监控输出快照
4 结束语
文中首先对航电系统仿真平台进行抽象,将其划分为实物子系统、接口转换子系统和仿真子系统,然后逐步细化完成了接口转换子系统和仿真子系统的设计,最终通过搭建原型系统测试验证了该设计方案的可行性。下一步将从丰富模型库中的模型、系统性能优化和工程化3方面对系统的功能和性能进行完善。基于该方案的航电系统仿真平台可应用于,新一代航电系统的前期技术方案论证与评估,并且支持并行研制航电子系统/设备,可缩短航电系统研制时间。
[1]胡乐申.实时分布仿真环境的研究与应用[D].西安:西北工业大学,2006.
[2]诸文洁.综合航电仿真系统关键技术研究[J].民用飞机设计与研究,2010(1):15-18.
[3]熊鹏飞,秦开宇,陈华伟,等.基于多线程MVC模式的航电仿真系统软件设计[J].测控技术,2012(6):120-123.
[4]孙亚红.基于Windows平台的分布式实时仿真系统[J].电子科技,2012,25(3):62-65.