分布式生命信号探测系统的设计
2013-10-17陈冬梅马少斌安文宣
陈冬梅 马 翔 施 健 马少斌 安文宣
(宁夏大学物理电气信息学院 宁夏 750021)
0 引言
我国是地震灾害多发的国家,最大限度地减轻地震灾害造成的损失,是我国防震减灾工作的重要任务,而如何搜救被压、被埋人员是地震救援的关键。根据相关研究报告,震后第一天内将压埋人员救出救活率为81%,之后依次递减,到第五天内救出救活率仅为7.4%,再往后救活的希望就更渺茫了。因此,各种生命探测技术、救援机器人的研究成为了热门课题。本文提出了一种结合了生命探测技术、救援机器人、无线自组网等相关技术的分布式生命探测系统。
1 生命信号探测系统概述
生命体中存在许多种可被外界感知的生命信号,这些信号通常以特定能量形式出现在人体外部,如声音信号、红外信号、光信号以及电磁信号等。这些频率不同的信号会以波的形式向外传播,生命探测系统(或仪器)正是通过探测这些不同形式的波,进而判断不同生命形式及其所在的具体位置。根据采集和处理信号的不同,生命探测方式可分为音频、红外和雷达三种探测方式。
音频生命探测方式是应用声波在介质中传播的原理,采用振动传感器和微电子处理器,对灾害现场进行全方位振动信息收集,并排除周围环境引起的噪音干扰波,快速判定被困人员位置。
正常情况下,物体都会产生红外辐射,每种物体产生的红外辐射具有自身的特点。人体产生的红外辐射与周围环境产生的红外辐射是有明显区别的,红外生命探测方法就是利用这一点来探测生命体的存在。其探测方法是通过热红外探头采集被困人员的身体热辐射能量,然后利用光学系统将采集到的能量聚焦在红外传感器上,红外信号转变成电信号后进行数据分析处理,最后,处理结果经过图像合成,再经显示器输出红外热像图,进而给搜救队员指出被困人员的大致位置。
2 系统总体设计
分布式生命信号探测系统是为灾难救援而设计的机器人系统,其任务是在地震后的废墟中搜索幸存者。为了实现灾难现场的分布式救援,本系统采用物联网技术在救援现场构建起一个分布式无线自组网络,系统总体结构如图1所示。
2.1 远程信息交互PC
本系统中自组网和无线网络共同构成远程信息交互系统,远程PC主要功能是通过无线网络访问救援现场,如对救援现场传回的图像、数据进行共享及分析,方便救援人员做出及时准确的判断;远程PC也可实现对现场主载体机器人的指引和控制。

图1 系统总体设计框图
2.2 主载体机器人
主载体机器人(以下简称机器人)可以装载分布探测小车节点进行移动,同时其自身还具有比分布式探测小车更强的救援功能。机器人主要安装了如下设备或软件: 底层控制子系统、图像采集子系统、环境信息采集子系统、无线收发子系统。
2.3 现场嵌入式计算机
现场嵌入式计算机的功能是在救援现场对现场主控节点汇总的数据进行整合运算处理,将数据压缩并通过无线网络传输给远程的PC系统或其它终端,供远方的人员进行分析。此平台采用CORTEX A8DB开发板。
2.4 主控节点
主控节点主要用来实现节点数据的收集、主控节点数据的发送对子节点有最基本的控制,子节点通过主控节点实现分布式自组网的建立,并在此基础上,进行更大面积的互联。2.5分布式探测小车节点
分布式探测小车,是一个体积小,功能较为全面的分布式探测节点,其主体加装摄像头、红外线探测仪、传感器、无线射频模块和定位模块等。因其体积小重量轻,可以到达人工无法到达的缝隙及危险地带,能较为准确地定位受困人员的位置,并将采集到的信息传送至主控节点。
3 主载体机器人主要功能设计
3.1 控制系统设计
机器人控制系统总体设计如图2所示。机器人上安装凌动N270处理器,用于传感器信息采集处理、发送传感器数据、接收控制信号、给底层控制板发送控制信号、绘制环境地图、接收转发摄像头图像等。
远程操控PC机与车载凌动N270平台通过无线网卡和无线路由器组成局域网,控制信号和传感器数据通过该无线网络进行传输。
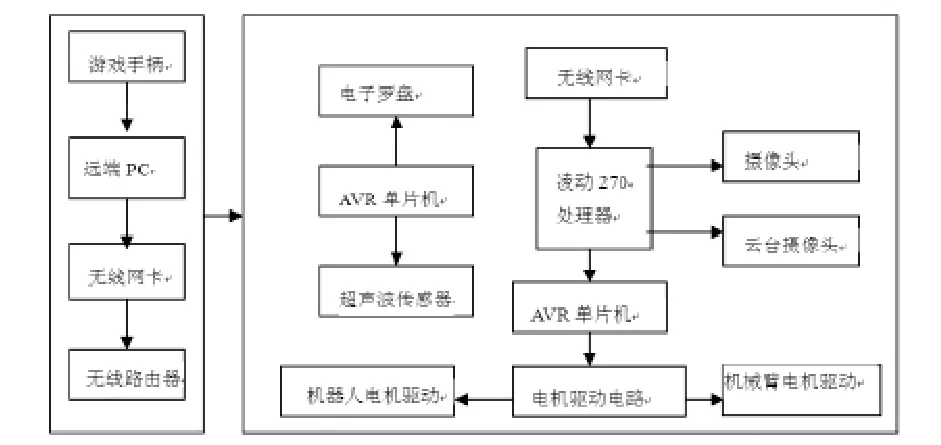
图2 机器人控制系统总体设计图
3.2 运动控制系统设计
根据机器人机械结构设计,其运动控制系统要求:
(1)控制机器人行进的两个电机正反转和调速;
(2)控制推杆电机的伸展和收缩;
(3)机械臂第一自由度的电机正反转和调速;
(4)机械臂上其他三个自由度上的舵机转角。
电机控制由凌动N270处理器、AVR单片机和电机驱动电路完成;舵机控制由凌动N270处理器、AVR单片机和接口电路完成,运动控制系统框图如图3所示。

图3 运动控制系统框图
3.3 机器人信息获取及传输
(1)云台摄像头
救援机器人需要搜寻被困者,因此,机器人上需要装备高分辨率可光学变焦的云台摄像机,可以由操作人员远程控制云台摄像机的运动。
(2)普通摄像头
本系统加装两个普通摄像头,用于反馈机器人状态。其中一个安装在机械臂前端,以获取机械臂操作状况;另一个安装在机器人尾部,观测机器人后部信息,用于机器人倒退避障。
由于这两个摄像头固定在机器人上,固定观测图像,不需要云台操控,所以采用USB接口的普通摄像头,通过USB与凌动N270平台连接。
(3)超声波测距
机器人为获得环境地图,首先需要获得其与周围障碍物的距离,鉴于激光测距仪价格昂贵,本系统采用超声波测距模块URF04。
本模块性能稳定,测量距离准确,能与国外的SRF05,SRF02等超声波测距模块相媲美。模块精度高,盲区(2cm)超近。
(4)信息传输
3个摄像头获取的图像、测距模块信息、电子罗盘信息通过凌动N270平台处理后,远程计算机通过无线网络查看凌动N270平台上获取的图像及信息,并通过无线网络发送控制指令给凌动N270平台。
远程计算机和机器人上的凌动N270平台各安装一块TLWN322G+ 54M无线USB网卡,它们之间通过TP-LINK公司生产的TL-WR741N150M无线宽带路由器组成无线局域网。该网络采用IEEE 802.11g协议,传输距离室内最远100米,室外最远300米。把无线路由器置于操控台和机器人之间的高处,使无线路由器和两块无线网卡之间的障碍物尽可能少,充分利用了无线网络的覆盖区域,并且尽量减小了无线信号的衰减,使传感器信息和控制信号能够传输得更远。
3.4 上位机控制软件设计
3.4.1 控制软件设计
控制软件安装在机器人上的凌动N270平台中,远程计算机通过访问凌动N270平台来控制机器人的运动及信息处理。软件功能包括摄像头图像获取、运动控制、摄像头云台控制、传感器数据处理、绘制环境地图等功能。机器人控制软件界面如图4所示。

图4 机器人控制软件界面
3.4.2 地图绘制的实现
机器人进入救援现场后需要绘制现场地图,地图内的信息主要包括幸存者、障碍物、通道等。本系统引入了GeoTiff格式进行地图存储,这是一种标准的地图格式,在地理信息系统和遥感影像的处理和应用中,栅格影像都包含有各种地理信息,而一般的BMP、JPG、TIFF等图像存储格式都不能对各种地理信息进行有效的存储,因此GeoTiff作为TIFF的一种扩展得到了广泛应用。
由于 Viusal c#.Net语言支持对TIFF文件的存取,因此,我们对GeoTiff文件的读取和写入都是建立在TIFF文件的基础上,这样就简化了代码,提高了开发效率。
4 结语
生命探测系统在灾害救援中发挥着至关重要的作用,它可以为救援人员探测人力无法到达的区域是否还有人员被困,从而帮助搜救人员迅速、准确、安全地发现幸存者,为营救工作争取宝贵的时间。本文提出的分布式生命信号探测系统,为救援机器人平台技术提出了一种新的思路,具有较好的应用前景。
[1]王耀南,李树涛.多传感器信息融合及其应用综述[J].控制与决策,2001,16(5):518-522.
[2]迟健男,徐心和.移动机器人即时定位与地图创建问题研究[J].机器人,2004,26(1):92-96.
[3]赵明,吴刚,王丽萍.生命探测仪及其技术原理[J].辽宁师专学报,2012,(6):96-98.
[4]翟浩,曹泽文.地震灾害搜索救援区域优先级分析[J].人力资源管理,2010,(8):24-27.