基于桥式起重机不规则板件吊物架的机构设计与分析
2013-10-17李艳芳崔成梅卢绪振赵庆松
李艳芳,崔成梅,卢绪振,赵庆松
LI Yan-fang1,CUI Cheng-mei1,LU Xu-zhen2,ZHAO Qing-song1
(1. 潍坊工程职业学院,青州 262500;2. 山东省农业机械科学研究所,济南 250100)
0 引言
随着加工技术的提高,在中等批量的生产车间里,零件在机床上的时间仅占生产时间的5%,而其余95%的时间都耗在了原材料、工具和零件的搬运、等待上[1,2]。自动导航小车(AGV)、机器人等运输设备的出现使在生产工程中物料运输效率有了很大的提高。对于规则零件运输目前已有很大的进步,但对于是不规则零件,尤其是不规则大型板件物料运输效率很低,亟待提高。
针对工程机械用大型不规则板件从下料到装配过程中运输效率低的问题,设计基于桥式起重机不规则板件的专用吊物架。专用吊物架的研制成功可大量节省板件在搬运过程中的时间,提高生产效率。
1 吊物架机构的总体设计方案
1.1 吊物架的功能要求
吊物架的设计是针对工程机械用大型不规则板件从下料到装配过程中的运输。不规则板件在运输过程中对吊物架有如下三点要求:
1)能够夹持不同厚度的板件,且可实现批量运输。板件的厚度规格有36mm、46mm、56mm不等[3],最多可夹持6块板件。
3)吊物架工作过程要求安全可靠。
1.2 吊物架机构的总体设计方案
为了在搬运不规则板件的过程中实现自动夹持及不等量地批量运输,吊物架的总体机构拟采用连杆机构,机构简图如图1所示。其工作原理:吊物架由横梁,夹持臂、滑块和气缸组成。吊物架在初始状态下,夹持臂成竖直状态,滑块在夹持臂内槽的在下端,滑块两侧安装轴承,可以实现在夹持臂内槽里上下滑动,滑块的上下滑动可实现夹持不同厚度及不等批量的板件。滑块与气缸相连接,气缸收缩,夹持臂保持不动,滑块沿夹持臂向上滑动并至上限位置,然后气缸继续收缩,夹持臂在滑块的作用下张开,准备夹持板件。当吊物架放置到与板件合适的位置时进行夹持工作,这时气缸伸长,夹持臂在气缸的作用下闭合,当夹持臂成竖直状态时,气缸继续伸长,推动滑块沿夹持臂向下滑动,直至压紧被夹持板件。当板件被放置到合适的位置,气缸收缩,带动压块向上滑动至上限位置,气缸继续收缩,使夹持臂张开,将板件放置。

图1 吊物架机构简图
由上述工作原理可知,吊物架的工作包含两个工作过程,即夹持工件的工作过程和卸载工件的工作过程。
吊物架夹持工件的工作过程包含四个运动过程:1)在初始状态下,夹持臂竖直,气缸收缩,滑块上移至最高点。2)气缸继续收缩,夹持臂张开,吊物架下移至合适位置,准备夹持工件。3)气缸伸长,夹持臂闭合至竖直状态,这时夹持臂已夹紧工件。4)气缸继续伸长,滑块下滑至工件上表面,压紧工件。
吊物架的卸载工作过程是夹持工件的反过程,包含四个运动过程:1)在工件已放置好的情况下,气缸收缩,夹持臂依然竖直,滑块上移至最高点。2)气缸继续收缩,夹持臂张开,卸载工件,此时吊物架上移离开工件。3)吊物架回到合适位置,气缸伸长,夹持臂闭合至竖直状态。4)气缸继续伸长,滑块下滑至最低点,随时准备加持工件。
2 吊物架机构的详细设计
从吊物架正反两个工作过程来看,可以归结为两个运动过程:即滑块运动过程和夹持臂的运动过程。针对这两个运动过程和吊物架的功能要求,下面以夹持工件工作过程中的两个运动过程进行详细设计吊物架的机械结构。
2.1 滑块运动过程分析
在滑块向上运动过程中,夹持臂保持竖直状态,即夹持臂的初始状态,这时气缸收缩,夹持臂相对于横梁保持不动,滑块在夹持臂的内槽中向上运动,直至其上限位置。由于此吊物架机构左右对称,因此在设计的过程中可对吊物架一边的夹持臂和气缸进行研究,即上述机构可以简化为图2。由图2可知,此机构相当于双滑块机构的正切机构,滑块的位移与气缸的转角成正比[4]。图中虚线和实线分别为压块的两个极限位置。
从“一带一路”倡议的推进情况、中国—东盟自由贸易区的建设目标、自由贸易试验区的核心功能以及广西的地理区位与产业基础薄弱的现状来看,广西申请建设自由贸易港区的战略定位可以聚焦于以下三个方面:中国—东盟自贸区升级版先行地、两廊一圈主对接平台以及边境开发开放示范区。
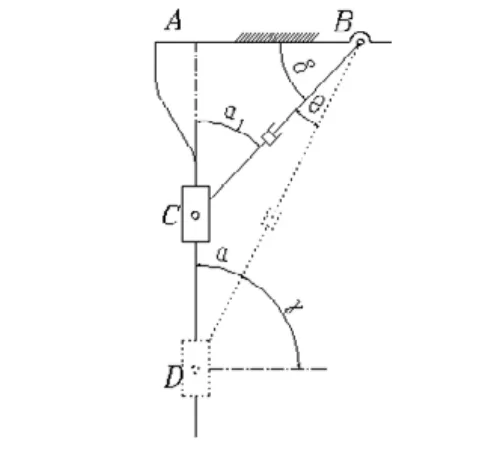
图2 滑块运动过程的机构简图
1)机构自由度分析:机构中含有3个活动构件,其中有2个转动副和2个移动副,没有高副,机构的自由度,即机构自由度为1。此机构的原动件是气缸,即原动件的数量和机构的自由度相同,可以确定此机构具有确定的运动。
2)构件位置分析:由图2知:在滑块向上运动的过程中,压力角α是不断增大的,传动角γ是不断减小的。由于α越小,γ越大,机构的传动性能越好;反之,α越大,γ越小,机构的传动性能越差,传动效率越低[5]。lAB=lACtanα1,根据所夹持板件的厚度和数量,确定滑块上下移动的距离为280mm,即lCD=280mm,AC的长度可以根据需要自由调整,暂取AC的长度lAC=310mm 。为了保证机构能够正常工作,一般规定γmin≥40°[6]。所以lAB=lACtanα1,即=310 tan40°=260.1mm 。则气缸的长度与滑块所走行程的关系为:

式中,x为滑块的行程。
2.2 夹持臂运动过程分析
夹持臂运动的过程是在滑块上升到最高点以后,气缸继续收缩,夹持臂张开,准备夹持工件。两夹持臂在张开的过程中,其运动是左右对称的,以右边的夹持臂为研究对象,其机构运动简图,如图3所示。由图3可知,此机构为摆动滑块机构(或称摇块机构)[7]。图中虚线和实线分别为夹持臂的两个极限位置。
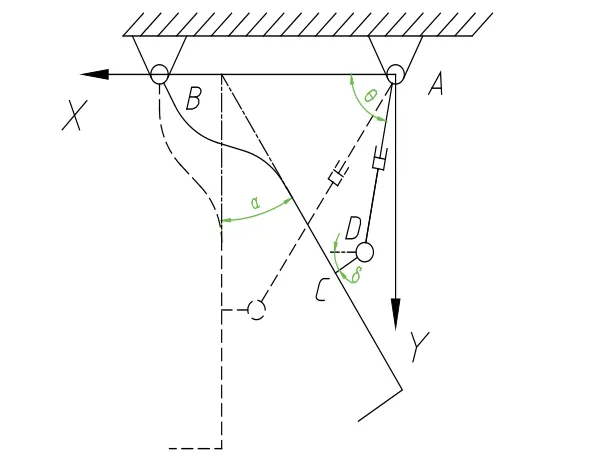
图3 夹持臂张开过程的机构简图
1)机构自由度分析:机构含有3个活动构件,3个转动副和1个移动副,没有高副,机构自由度,即机构自由度为1。机构的原动件为气缸,即原动件的数量和机构的自由度相同,可以确定此机构具有确定的运动。
2)构件位置分析:AD为气缸,BC为夹持臂,AB为气缸相对于夹持臂的安装距离。利用矢量方程解析法[8]对这个运动过程进行分析。在封闭的矢量四边形ABCD中,有矢量方程:
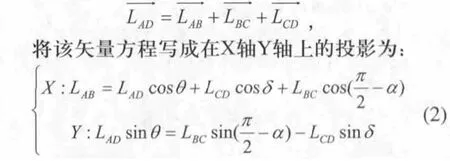
在机构运动的过程中,d=a恒成立,根据夹持臂的初始位置和气缸的运动行程可知如下已知条件:

其中,11为气缸第二个运动过程的行程,L0为气缸全收缩时的长度。

由(2)式和(3)式可以求得a与气缸行程l1之间的关系,即所选气缸满足夹持臂张开及闭合的运动范围,从而确定了夹持臂的位置变化与气缸行程之间的关系。
3 吊物架实体造型构建
根据以上吊物架的功能要求和机构运动过程的分析,最终确定了吊物架的结构及各零部件的尺寸。Pro/E 软件是目前国内外最为先进的基于特征的三维参数化设计系统之一,易学易用、功能强大[9]。依托Pro/E软件强大的功能对吊物架各零部件进行实体构建,然后对吊物架进行虚拟装配。
3.1 横梁实体模型构建
横梁的结构需要考虑到与气缸、夹持臂的铰接,另外还需考虑吊物架在工作时的平衡,即吊点的设置,其结构如图4所示。

图4 横梁模型
3.2 夹持臂实体模型构建
夹持臂的结构需要考虑到被夹持板件的结构、滑块的运动等情况,夹持臂结构如图5所示。另外夹持臂结构设计保证了滑块在上下运动的过程中保持竖直状态。

图5 夹持臂模型
3.3 滑块实体模型构建
滑块需要在夹持臂内槽里上下运动,同时与气缸相连,滑块的结构设计如图6所示。滑块两侧的轴承安装实现了滑块在夹持臂内槽里上下滑动。

图6 滑块模型

图7 吊物架模型
3.4 吊物架实体模型构建
虚拟装配是一种零件模型按约束关系进行重新定位的过程,是有效分析产品设计合理性的一种手段[4,5]。它是在计算机上完成产品零部件的造型设计,进行计算机装配、干涉分析等多次协调的设计过程,是产品数字化设计的重要环节。在Pro/E的装配模块中建立零部件之间的连接关系,这种连接关系的建立是通过配对条件在零部件之间建立约束关系来确定零部件在产品中的位置。装配完成后的吊物架模型如图7所示。在吊物架装配完成以后,需要对装配模型进行干涉分析。经静态干涉分析,各零部件之间没有干涉。
4 吊物架机构运动仿真
进入Pro/E的机构模块中,定义运动轴,定义的连接应确保机构按预期的要求运动,添加合适的伺服电动机作为动力源,以便进行位置分析和运动分析,从而验证吊物架机构分析的合理性。吊物架的运动过程如图8所示。吊物架运动仿真的结果表明,该机构运行平稳可靠,没有干涉状况出现,满足设计要求。
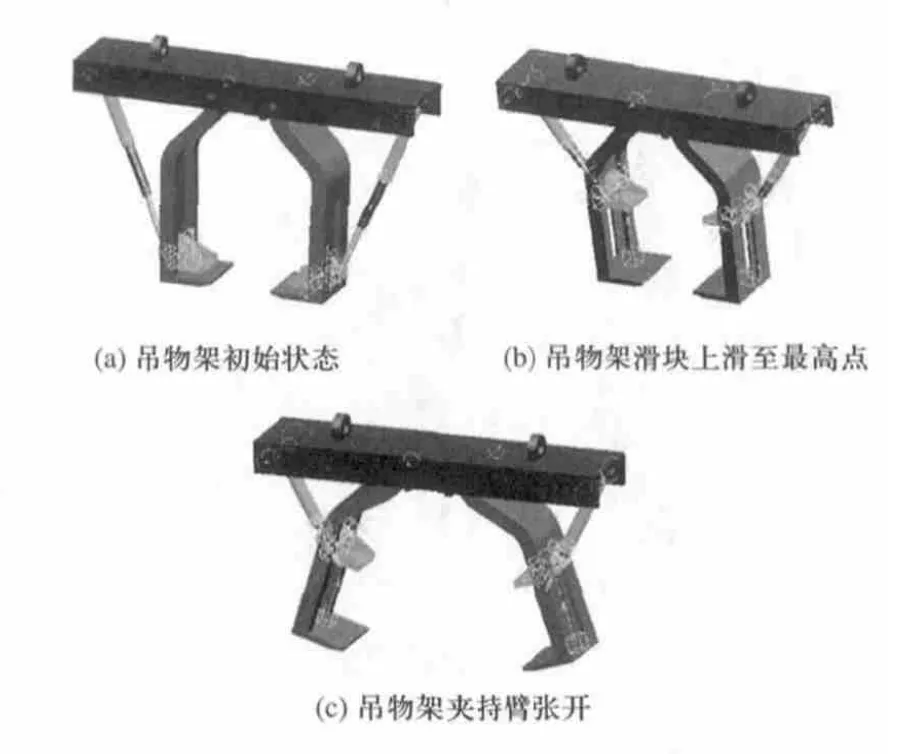
图8 吊物架运动过程
5 结束语
根据所夹持板件的要求,设计了吊物架的机械结构,并在理论上进行解析,得到机构的运动变化情况。利用Pro/E软件强大的功能进行三维建模、虚拟装配和运动仿真分析,来检查吊物架各零部件之间的运动干涉情况,进而验证了机构设计的合理性。它的研制将会提高不规则板件的搬运效率,也将为不规则板件吊物架的发展打下基础。
[1] 周云.机械制造业物流发展综述[J].www.edit56.com.2007(9)∶53-55.
[2] 郭玉萍.基于仿真技术的制造企业生产物流研究[D].天津工业大学机械工程学院,2009.
[3] GB/T 1591-2008,低合金高强度结构钢[S].2008.
[4] 李康业,略谈正切机构及应用[J].机械科学与技术∶1998(1)∶17-19.
[5] 郑文纬,吴克坚.机械原理[M].北京∶高等教育出版社,2003.
[6] 杨可桢,程光蕴.机械设计基础[M].北京∶高等教育出版社,2006.
[7] 刘银华,闫维新,刘小勇.曲柄摇块机构在自动烹饪机器人中的应用[J].机械工程师∶2006(05)∶64-65.
[8] 孙恒,陈作模.机械原理[M].北京∶高等教育出版社,2006.
[9] 马希青,教光印,李秋生.基于Pro E的液压支架三维实体建模与运动仿真[J].煤矿机械;2007(1)∶73-75.
[10] Moore K E,Gungor A,Gupta S M. Disassemb1y Petrinet generation in the Proeess of XOR Preeedence re1ations[J].In∶1998 IEEE Internationa1 Conference on Systems,Man,and Cybernetics.San Diego,Ca1ifornia,USA,1998∶13-18.
[11]Kang J G,Lee D H,X P,Xirouchakis p,et a1.Para11e1 disassemb1y sequencing with sequence dependent operation times[J].Anna1s of the CIRP 2001,50(1)∶343-346.
