提升直流并网风电故障穿越能力的新方法
2013-10-10孙世贤
孙世贤,田 杰
(1.国网电力科学研究院,江苏 南京 210003;2.南京南瑞继保电气有限公司,江苏 南京 211106)
0 引言
风力发电是21世纪最有发展前景的绿色清洁能源,是智能电网低碳可持续发展的一个重要研究方向。但风能具有很强的随机性和间歇性,风电的大规模直接并网将会改变已有电源的结构特点,对电网的影响十分显著[1-2]。而且风电机组多为异步电机,对无功的需求十分严格,其对电网电压的稳定更加不利。而近年来快速发展的柔性直流输电技术,则是解决风电并网问题的重要方式[3-4]。柔性直流输电能够四象限运行,可联接弱源或无源系统,能起STATCOM的作用发出无功,且无需站间通信,不增加系统短路容量[5-7],在解决风电并网上具有突出优势,特别是基于模块化多电平换流器技术[8]的柔性直流输电。
并网风电的故障穿越(又称低电压穿越)问题历来是风电并网的瓶颈,我国还有多数风电场因不满足并网要求而不能并网发电。所谓风电故障穿越,指风电并网端电压在一定的跌落范围内,其不脱网、持续运行的能力。而目前大多数的风电场应对故障穿越的措施主要有:采用动态无功补偿装置[9](包括柔性直流输电等能收发无功的输电方式)以快速提升并网端电压,其对穿越能力提升有限;设置快速桨距控制对功率源头进行调节,以减少过剩功率稳定转速,其实现难度极大;双馈风机励磁控制及其特有的转子橇杆保护[10]设计复杂且作用有限;增置辅助设备,如交流侧装设制动电阻[11]或直流侧装设斩波电路[12],以吸收过剩功率,其增加成本和设计复杂度,不经济。
本文在总结上述故障穿越措施的基础上,结合直流并网风电系统,提出新的故障穿越方法:在系统交流故障时,即保障柔性直流逆变输出不出现过流的情况下进行最大有功输出,以减少过剩功率;同时控制直流输电整流侧,在保障风电场稳定运行情况下减小有功的输入,以抑制直流过压问题。此方法有效地实现了开源节流的目的,本文通过控制实现了这种策略,并建模仿真验证其可行性。
1 并网系统概述
1.1 系统接线简介
结合南汇柔性直流输电示范工程,本文简略取风电经柔性直流并网的主接线形式见图1。其中风电场的风电机组取为普通异步发电机,多台风机并联经柔性直流输电接入系统。该直流系统采用模块化多电平换流器 MMC(Modular Multilevel Converter)技术换流,其谐波极小,故无需滤波装置。柔性直流输电系统的运行方式为:整流侧采用无源网络控制方式,逆变侧采用定直流电压、定交流电压方式。故障扰动点取并网公共端交流母线。

图1 风电经柔性直流并网图Fig.1 Grid-connection of wind farm based on VSC-HVDC
1.2 内环电流控制
电压源型换流器的稳态控制,通常在同步旋转坐标下进行设计[13],把换流器的交流电压方程进行线性解耦,就可以得到基于PI调节的经典内环电流控制器,如图 2所示,其中 isd、isq和 usd、usq分别代表经旋转坐标变换后的系统d、q轴电流和系统d、q轴电压,ωL为系统等效换流电抗。通过外环功率控制器产生内环电流控制输入指令id、iq值,即可得到换流器的调制电压参考值ucd_ref、ucq_ref,通过波形调制输出,即可实现外环各种调节控制的目的。需强调的是,内环电流控制器的电流指令值必须经过限幅环节的限幅控制,以确保不产生危及换流器件安全的过电流,这也是本文即将要讨论的重点内容。
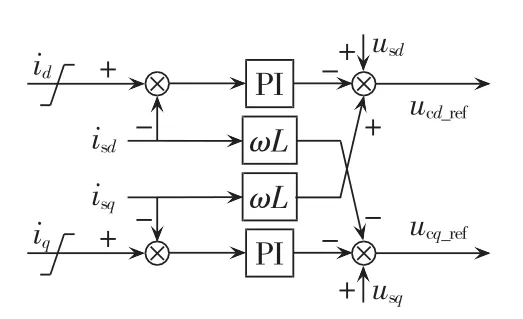
图2 内环电流控制器Fig.2 Current controller of inner loop
2 逆变限流控制
系统运行过程中由于发生故障或者受到扰动等原因,会产生很大的过电流,从而可能损坏阀器件或其他设备。为了能够保护换流器不产生过电流损坏器件,必须要在内环电流控制器的电流指令值加设一限幅环节,如图2所示电流限幅环节。设直流系统换流器过载能力为K,额定电流幅值为Iam,交流电压额定为UN,系统额定容量为SN,则最大电流允许值为:

而针对限幅环节的限值如何设计,相关研究则少有提及[14-15]。多数研究采取的是如图3所示设计:按照dq轴电流优先考虑的情况,将过电流矢量IF限幅到允许电流内,如图中A点对应于无功电流优先方式,B点对应同比例减小方式,C点对应有功电流优先方式。如取无功电流优先方式,则先考虑设定无功电流限值Iqlim,再根据限流圆计算有功电流限值Idlim,即A点所对应坐标矢量。
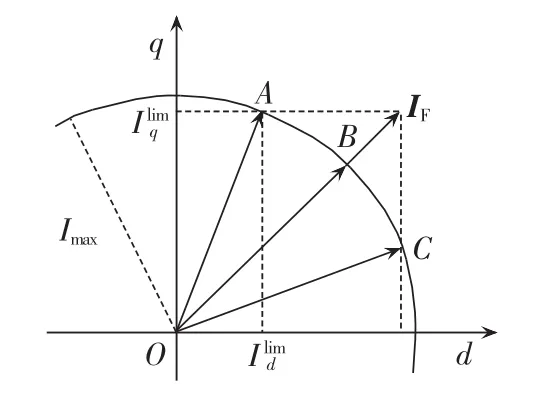
图3 传统电流限幅矢量图Fig.3 Vector plot of traditional current limiter
可见传统电流限幅乃为恒定值限幅,即静止的电流矢量限幅,仅表示了一种情况下的电流限值,而且还极大影响其故障穿越能力的发挥。为此,本文提出,类似常规直流输电的低压限流[16],实行动态限流。考虑在过电流情况时,优先取有功电流限定,以尽量使过剩有功传输出去,提升故障穿越的能力;再通过有功电流限定输出值作为取无功电流限值的基础,求取无功电流限值。其逻辑关系如式2所示。
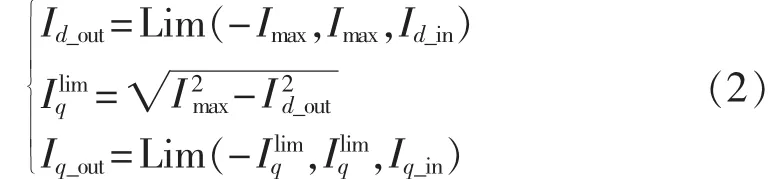
其中,Lim(·,·,·)是限幅环节的取限函数,其参数分别对应下限、上限和取限变量。结合传统限幅中的优先有功电流方式,即先用最大电流允许值Imax作为其限值,得到d轴电流结果;而后根据有功电流的取限结果,求取无功电流的限值,从而确定无功电流的取限输出。
发生电流扰动时,其有功电流的取限结果是不确定的,故电流的限值坐标是动态的,如图4所示。当电流在圆内扰动,如I1,其不会受到限制,只是其限幅环节的限值不是恒定的,其对应的限值坐标为I1lim;当扰动电流在限流圆和最大允许电流界定的方框之间,如I2,其取法与传统有功电流优先方式相似,取I2lim;当扰动电流超出了最大允许电流界定的方框,其限值恒定为I3lim,只开放有功电流,无功电流为0。
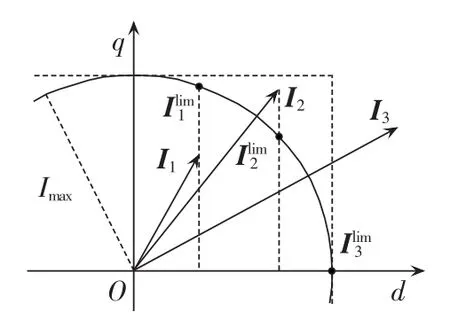
图4 电流动态限幅矢量图Fig.4 Vector plot of dynamic current limiter
短路故障时,由于电压跌落,有功输出已经受阻,动态限幅在提升功率输出的作用不是很明显;但在故障清除后,电压恢复,其能加大有功的输出,使故障期间积累的过剩能量快速输出释放,具有更好的故障恢复能力。
3 整流功率控制
逆变侧发生交流短路故障期间,虽然采取了上节所述的提升功率输出措施,但仍有大部分功率输出受阻。而整流侧输出不加控制时,其输入直流系统的功率不会改变,从而将会导致直流电容电压不断上升,可能危及器件安全。
要想抑制直流电压的继续上升,较好的办法是让整流侧有功功率与逆变输出功率也同步减少。减少整流功率输入的办法有风机桨距调节、转子旋转储能2种,而桨距调节是缓慢的,故只能考虑风电机组转子暂时提速这种办法,进行旋转储能。从故障开始到故障清除0~t这一过程,根据能量守恒,可知变化的能量关系为:
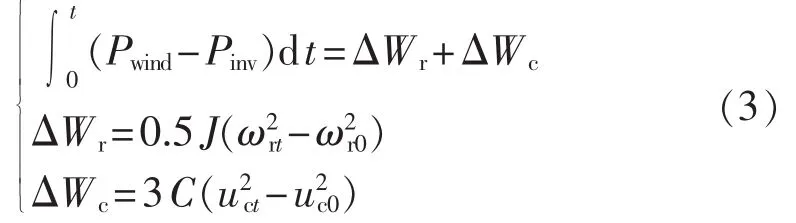
其中,Pwind为风力机输入功率,Pinv为逆变侧输出功率,ΔWr为转子故障期间的储能变化量,J为转子等效转动惯量,ωr0、ωrt为故障起、止时刻转子转速,ΔWc为直流侧电容故障期间的储能变化量,C为相单元等效电容,uc0、uct为故障起、止时刻直流电压值。
为了提升系统的故障穿越能力,且保证直流电压在安全范围内,就必须让转子暂时升速储能,如式(3)所示。现在的问题是如何通过整流站的控制实现转子升速储能。根据电机特性,由图5知,提速共有2种方法,即降低风电场出口电压和提高出口电压频率。图中Pe为发电机输出功率;Pm为风力机输入功率;s为发电机转差率;scr为临界转差率;Ue为发电机输出电压。图中变量均为标幺值。
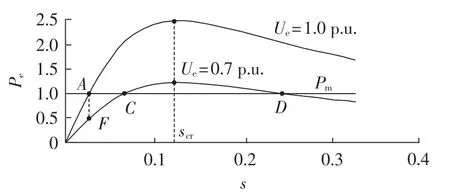
图5 异步发电机转差-功率曲线Fig.5 Slip-power curve of induction generator
降低风电场出口电压,虽然可以提升转子储能,但风机失稳的风险增大,稳定裕度降低。如图5所示,设电压变化到0.7 p.u.,运行点由A转移到C,其稳定裕度降低,不可取。而采取短时提升整流侧出口的交流电压频率,类似变频调速,电机转差不变即稳定裕度不变,而电机转速却能得到提高。
为了实现风电场机组的提速储能,就需要控制整流侧无源方式的输出频率。风电场之所以采用无源控制方式,是因为其电机为异步电机,而异步电机系统没有同步电源,属于无源网络,故柔性直流输电整流侧必须采用无源网络控制方式,即采用角度位置生成器来产生恒定频率变化的角度,如图6所示。图6中带星号变量为参考给定值,其余为实际检测值。图中θ为相位角,供坐标变换模块使用,在给定频率f*下进行三相与两相坐标之间的变换。
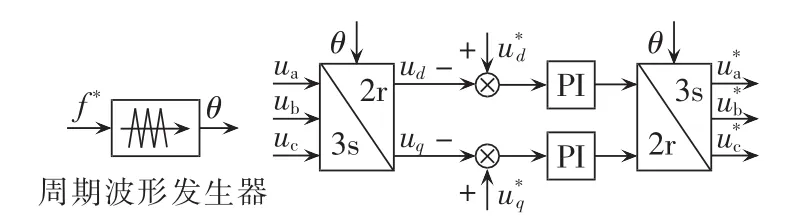
图6 无源网络控制方式Fig.6 Passive network control
调频提速控制正是通过改变无源控制方式的参考频率来实现的。如图7所示,其具体的控制实现,是将直流电压的上升偏差ΔUdc作为检测信号,当其超出死区环节限制,则经放大处理,并以一定速率增大无源控制方式的振荡频率。其中放大倍数KF取系统承受的直流过电压值与风机转速允许超速的限值之比。得到的整流侧转子储能控制如图7所示,其中速率限制器是为了防止整流侧出现过电流。
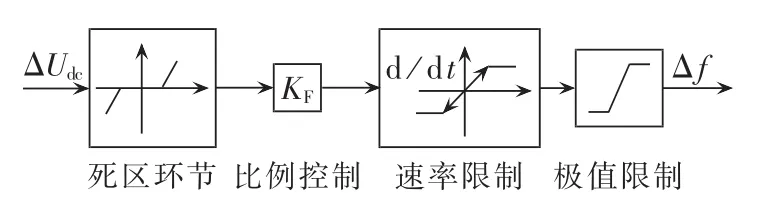
图7 调频提速控制器Fig.7 Rotor energy storage controller
4 仿真验证分析
4.1 仿真系统参数
风电场为11台恒速异步风电机组,额定输送容量为11×1.5 MW,功率因数为0.85(滞后),单台风机通过0.69kV/10.5kV升压变压器后汇集到一起,再经10.5kV/35kV升压并网到输电公共端;MMCHVDC额定交流电压为31kV,额定直流电压为±30kV,每桥臂20个模块,模块电容为9 mF,直流额定容量为20 MV·A,两换流变为35kV/31kV;系统电压为35kV,系统阻抗为1.736+j3.84 Ω。其主接线如图1所示,在PSCAD/EMTDC中进行建模仿真。
4.2 电流限幅仿真
为便于观察仿真波形,整流侧不加任何控制,取系统逆变站网侧母线在0.5 s时刻发生三相短路,交流电压跌至额定电压的50%时,经历0.2 s后清除故障。过载能力K取1.25,对于传统静止限幅,有功电流限幅取K倍额定有功电流,即为1.03 p.u.,从而无功电流限值为0.708 p.u.。
2种限幅方式对比仿真,其波形如图8所示,图中纵轴均为标幺值,上面两图从上至下分别为采用静止限幅控制、动态限幅控制时的波形。故障期间,2种限幅方式电流都达到相同最大值,而动态限幅d轴电流直接升为1.25 p.u.,q轴电流为0;动态限幅故障时有功输出更大,这是d轴电流开放的结果,但其电压则相对更小,这是无功降为0的结果;通过观察功率波形和直流电压波形,可知由于动态限幅开放d轴电流,其故障清除时的恢复时间更短,效果更好。
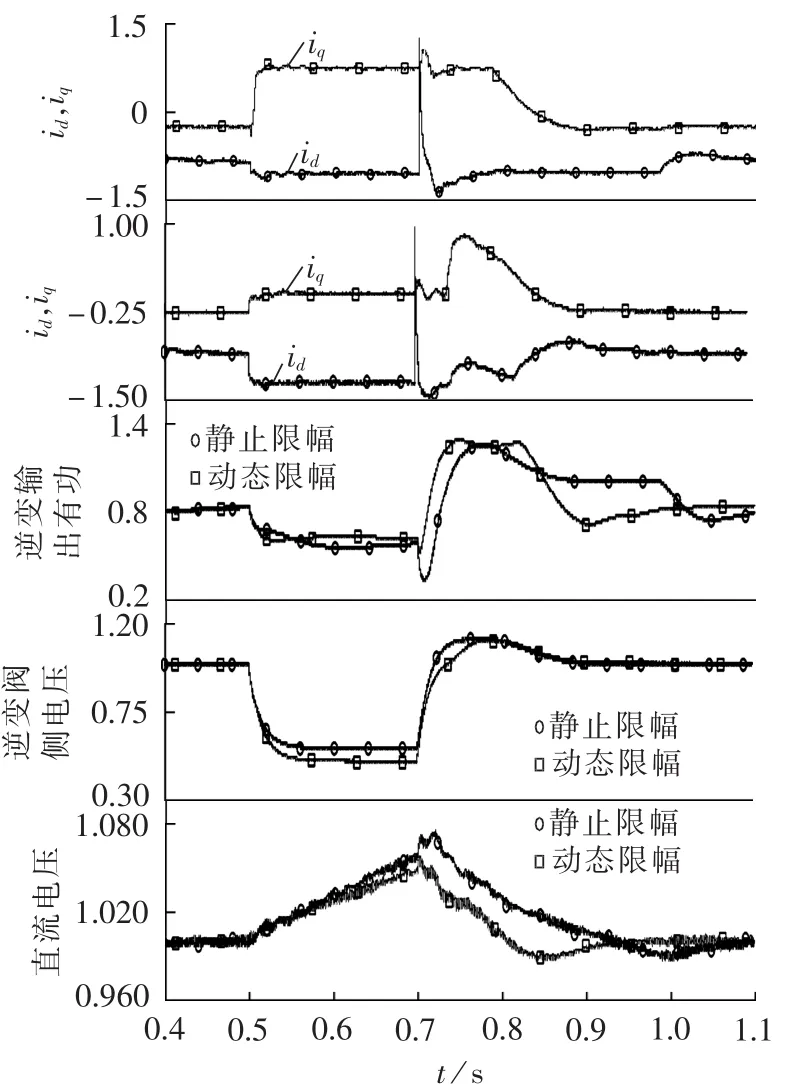
图8 2种电流限幅方式仿真波形Fig.8 Simulative waveforms of two current limiters
4.3 故障穿越仿真
逆变侧采用电流动态限幅控制,过载能力K取1.25,整流侧采用提速储能控制,其中放大倍数KF取2,频率变化量Δf限定在±5 Hz。故障仍取逆变网侧在0.5~0.7 s发生三相短路,电压跌至20%。其故障仿真波形如图9、图10所示,图中纵轴除风电出口频率外均为标幺值。
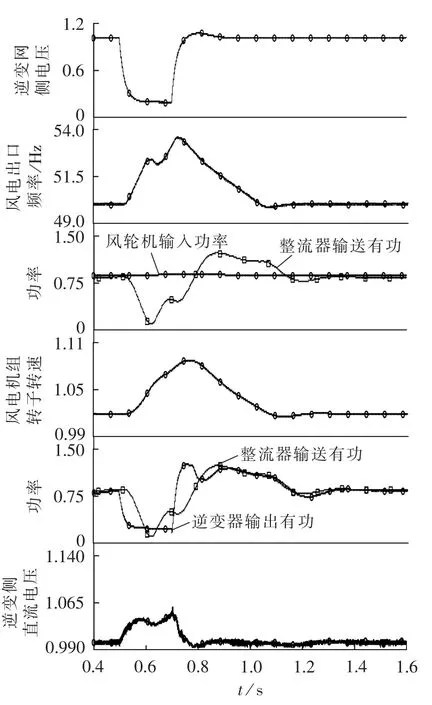
图9 采用调频提速控制仿真Fig.9 Simulative waveform with rotor energy storage control
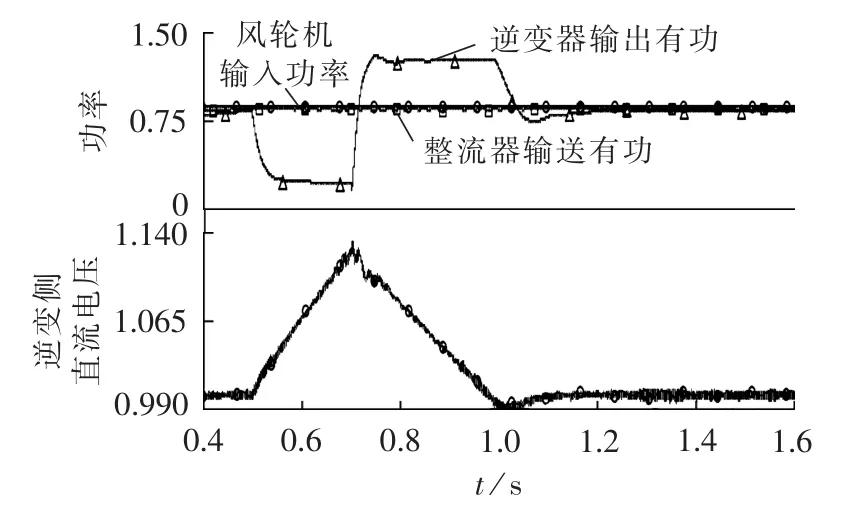
图10 取消调频提速控制仿真Fig.10 Simulative waveform without rotor energy storage control
当整流侧采用了调频提速方案后,故障期间储能控制器提升风电出口电压频率,从而转速得到提升;故障过剩能量暂时以动能形式储存在转子中,其结果表现为整流侧的输送功率相应减少;整流侧输送功率几乎与逆变侧输出功率同步减小,从而使得直流电压不会上升过大。
由直流电压波形可知,采用了提速储能方案后,故障期间其上升是很小的,不超过额定的5%;而当没有采取风电机组转子储能控制时,其风电出口的频率不变,转速亦不变,故其整流侧有功的输送保持不变,从而使得过剩能量在直流侧积累,导致直流电压迅速上升,超出了额定的14%。比较可知,当直流电压允许相同的过压能力时,调频提速可大幅增长故障穿越时间,即提高故障穿越能力,且是对整个风电场所有风机进行提速储能,其可储能量十分巨大。
5 结论
根据柔性直流输电的内环电流控制特点,本文分析了传统电流指令限幅器的特点,提出了动态限幅的概念。仿真验证所设计的动态限幅器在过电流时能提高换流器的功率输出,其更大的优点在于能极大地提高故障清除后的恢复速度。同时,为了提升风电经直流并网的系统故障穿越能力,提出了调频提速的办法,达到故障期间转子旋转储能的目的,仿真验证其具有很好的储能效果,能极大提高并网系统的故障穿越能力。
