基于LMS算法的三维电阻率采集系统的干扰场实时补偿
2013-10-10陈国玉龚育龄黎正根汤洪志
陈国玉, 龚育龄, 黎正根, 汤洪志
(东华理工大学,江西 抚州 344000)
在矿产资源和能源勘探的野外观测中,直流电法勘探经常遇到未知电场的干扰,影响观测精度和工作效率,有时甚至使工作无法开展。而利用电法勘探方法在矿山周围及深部寻找新矿体、矿化带是地质勘察中方法手段之一(汤洪志等,2011;杨再立等,2013;金和海,2006);在寻找地下水、解决工程地质问题方面也得到了广泛应用。特别是三维电阻率电法勘探,可以探查地下电性的精细结构(刘申芬等,2009;汤洪志等,2011;杨再立等,2013;周小仙,2009),如不能对外界干扰电场进行有效的去除,将失去三维电阻率电法勘探的意义。因而研究将干扰电场的影响减小到最低程度的技术非常必要。本文所讨论的三维电阻率数据采集系统中对干扰场进行实时补偿方法可在资源勘查中发挥一定的作用。所谓实时补偿,就是外界干扰电压怎样随时间变化,三维电阻率数据采集系统中就送出一个和外界干扰电压极性相反的和它一样变化的电压把干扰电压补偿掉。现代的电子技术已经可以使三维电阻率数据采集系统中CPU速度很快(微秒及纳秒级),而外界干扰场变化速度较慢(秒级及毫秒级),采用现代数字信号处理技术,对外界干扰场的变化实行跟踪并实时补偿,是可以实现的。自适应滤波理论和技术属现代数字信号处理范畴,它可以在无需先验知识的条件下,通过自学习适应或跟踪外部环境的变化,并最终达到均方误差最小的最优滤波性能(董宁,2009;潘仲明等,2013;王永德等,2008;西蒙赫金,2003;郑顾平等,2011)。
传统的电法仪器接收通道中大多数对极化电位进行补偿,在仪器内部采用一个稳定的而非随时间变化的电位差进行补偿。这样的补偿对变化缓慢的极化电位是有效的,但对外界的复杂环境,特别是在干扰源多且不规律等干扰严重的情况时,其补偿效果是差强人意的。干扰场分为天然干扰场和人工干扰场两种,天然干扰场主要由大地电流场、电离层波动、雷电活动、地下水的流动、氧化还原作用等因素所引起。人工干扰场主要由工农业生产中各种电机、电线感应等产生的游散电流所引起。其中天然干扰场变化速度慢,有规律性,可以用传统的直流补偿方法加以克服。真正影响较大且用传统的直流补偿方法难以克服的是人工干扰场。因其具有多源性、随机性、位置不稳定,以及变化速度快,强度大,规律难寻。如某矿区直流电机很多,直流电机突然减速、负载变化、干扰电场源的接地条件突然变化,引起的是直流脉冲式多阶梯状干扰场,干扰电压幅度及频率变化激烈,幅度在几毫伏到几伏之间,频率在零点几赫兹到几百赫兹之间。井下及地表运输车辆大多采用直流电动机作动力,电机通过铁轨或接地形成回路,就有电流流经地下,因为车辆是移动的,便形成了移动的干扰场源,车辆逐渐接近观测点时,强度不断增加,离观测点最近时强度最强,当车辆逐渐远离观测点时,干扰场强度逐渐降低,引起的是大低频背景条件下的高频干扰场,幅度在几毫伏到几伏之间,频率在零点几到几十赫兹之间。
在其他行业如军事、航空航天等,自适应滤波技术得到了很大的发展(郑顾平等,2011;潘仲明等,2013),依据不同的优化准则可以推导出许多不同的自适应滤波算法,目前最基本的自适应滤波算法主要分为最小均方(LMS)算法和递推最小二乘(RLS)算法两种:
(1)递推最小二乘法(RLS)算法。递推最小二乘法的基本算法是递归最小二乘(RLS)算法,它是严格以最小二乘方准则为依据的算法。递归最小二乘法(RLS)算法是一种快速收敛的算法,该算法判决依据是直接处理接受数据,使其二次性能指数函数最小。这种自适应滤波器,通过调节滤波器参数,使得基于过去的观测样本而得到的观测信号在某种意义上最逼近原信号。RLS算法其主要优点就是收敛速度快,其收敛性能与输入信号的频谱特性无关。主要缺点是每次迭代计算量很大。随着加权因子的变小,RLS算法的收敛速度加快,其稳定性相对减弱。
(2)最小均方误差(LMS)算法。LMS型算法是基于最小均方误差准则(MMSE)的维纳滤波器和最陡下降法提出的,这种算法依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最优的自适应迭代算法。算法不需要计算相应的相关函数,也不需要进行矩阵运算。因为基于LMS算法的自适应滤波器具有结构简单,计算量小,鲁棒性好,易于实现等特性仍然在自适应滤波算法中占据重要地位,因而在噪声消除、系统辨识、信道均衡、信道估计等领域得到广泛应用。
本文就是将最小均方误差(LMS)算法应用在三维电阻率数据采集系统对外界干扰场的实时补偿中。
1 三维电阻率数据采集系统简介
三维电阻率的数据采集系统基本结构见图1。三维电阻率数据采集系统由主控机、高精度数据采集系统(子采集站1~n)、CAN总线和电源四部分组成,其中高精度数据采集系统是它的核心部分。
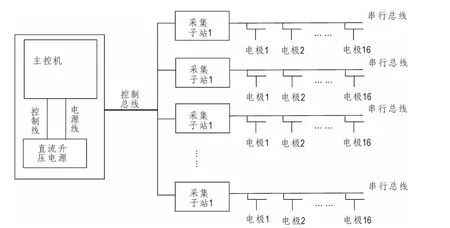
图1 三维电阻率结构框图Fig.1 3-D resistivity structure diagram
高精度数据采集系统是整个三维电阻率数据采集系统的核心部分。三维电阻率数据采集系统由于需要采集速度快、数据量大而对处理器的要求高,而当前基于8位单片机如51型单片机的数据采集系统其主要缺点是处理速度慢、系统资源有限、实时性能较差,不能适应其开发要求(马明建,2012;马维华,2006)。ARM是业界领先的16/32位嵌入式 RISC处理器。LPC2290芯片是以ARM7TDMI-S为内核的微处理器,它集成了外设控制器如存储器、USB总线等,具有很高的性价比,在硬件水平上足以满足项目研发的需求①广州周立功单片机发展有限公司.ARM7TDMI-S(Rev4)技术参考手册.。
2 三维电阻率数据采集系统自适应算法及某道滤波器结构
传统的IIR和FIR滤波器是时不变的,即在处理输入信号的过程中滤波器的参数是固定的,使得当环境发生变化时,滤波器可能无法实现原先设定的目标(Bonnie et al.,1999)。自适应滤波系统是根据当前自身的状态和环境调整自身的参数以达到预先设定的目标,自适应滤波器的系数是根据输入信号,通过自适应算法自动调整的。三维电阻率数据采集系统中的自适应信号处理系统的工作过程是:输入信号x(n)通过本系统后产生输出信号(或响应)y(n),将其与参考信号(或称期望响应)d(n)进行比较,形成误差信号e(n)。通过自适应算法对滤波器参数进行调整,最终使e(n)=d(n)-y(n)的均方值最小。维纳滤波器必须有输入信号统计特性的先验知识,即参考信号(或称期望响应)d(n),所谓先验知识是指已知勘探地区大量的干扰场信息,这在电法勘探实际工作中往往难以预知,自适应滤波器用输入信号x(n)来学习所要求的统计特性,渐进收敛(均值意义上)到维纳解,而不需要参考信号d(n),在电法勘探中带来很大的方便。
因此,自适应滤波器具有“自我调节”和“跟踪”能力。因而非常适合三维电阻率数据采集系统中对各种干扰电压进行实时补偿。一般来说,自适应滤波器分为线性自适应滤波器和非线性自适应滤波器。非线性自适应滤波器具有很强的信号处理能力,但由于非线性自适应滤波器有更高的计算复杂度,因此在实际应用中受到限制,而用得多的仍然是线性自适应滤波器。
2.1 三维电阻率采集系统中某—道自适应滤波器的结构
自适应系统一般分为开环自适应和闭环自适应两种类型。开环自适应系统的工作原理对输入信号或环境特性进行测量,用测量得到的信息形成公式或算法,并用以调整自适应系统本身。开环自适应系统的自适应算法仅由输入信号确定;而闭环自适应系统相对于开环系统还利用系统调整所得结果的有关知识去优化系统的某种性能,是带有性能反馈的自适应系统。闭环自适应系统的自适应算法不仅取决于输入信号,而且还与输出结果有关,是由二者共同决定的。一般开环自适应系统运算速度较快,实现相对容易,但它的适应性较差,应用面窄。而闭环自适应系统由于存在着性能反馈,能够自身优化系统结构和参数,使系统的适应性和可靠性得以改善(马明建,2012;王永德等,2008)。因此本文的算法实现形式皆采取闭环系统。
图2为三维电阻率采集系统某一道极化补偿电路结构图,其输入为带有外界干扰电压x(n)和有用的直流信号两部分组成,电法仪可编程滤波器是三维电阻率数据采集系统中CPU的一部分寄存器,输出是经过线性自适应滤波器跟踪与补偿的有用直流信号y(n)。自适应算法就是CPU中的一段程序(郭文斌,2006)。
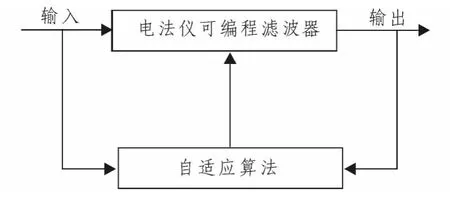
图2 三维电阻率采集系统某一道极化补偿电路结构Fig.2 A tract of polarization compensation circuit structure of three-dimensional resistivity data acquisition system
2.2 最小均方误差(LMS)算法
本文采用的最小均方(LMS)自适应算法是基于梯度的算法中最简单的一种,它使用的是使均衡器期望输出值和实际输出值之间的均方误差(MSE)最小化的准则,依据输入信号在迭代过程中估计梯度矢量,并更新权系数以达到最优的自适应迭代算法(吴利斌,2007;西蒙赫金,2003)。LMS算法是一种梯度最速下降方法,其显著的特点是它的简单性。这种算法不需要计算相应的相关函数,也不需要进行矩阵运算因此被广泛应用。
选定均方误差为权矢量二次函数时,性能度量曲线可以形象地看成一个碗形曲面,这样自适应处理器的任务便是不断地向最低点逼近,即可以通过计算梯度的方法实现性能度量的最优化。自适应过程即是在误差性能曲面的最陡下降方向移动并逐步校正滤波系数,最终到达均方误差为最小的碗底最小值,获得最佳滤波或准最优工作状态。
瞬间梯度预测产生的Widrow-Hoff LMS算法中,令▽(n)代表n时刻的M×1维梯度矢量,M等于滤波器系数的数目;w(n)为自适应滤波器在n时刻的滤波系数或权矢量。按照最陡下降法调节滤波系数,则在n+1时刻的滤波系数或权矢量w(n+1)可以用下列递归关系来计算:

式中μ是自适应步长,是一个常数,通常称它为自适应收敛系数或步长,用来控制稳定性和收敛率。最小均方(LMS)算法是一种用瞬时值估计梯度矢量的方法,即

按照最陡下降法调节滤波系数,则在n+1时刻的滤波系数或权矢量w(n+1)可以用下列简单递归关系来计算:

这种瞬时估计是无偏的,因为它的期望值e(n)等于最陡下降法的梯度矢量。以任意初始向量w(0)开始LMS算法的计算,其步骤如下;
(1)由现在时刻n的滤波器系数矢量估计值w(n),输入信号矢量x(n)及期望信号d(n),计算误差信号e(n):e(n)=d(n)-xT(n)w(n);
(2)利用递归法计算滤波系数矢量的更新估值:w(n+1)=w(n)+2μe(n)x(n);
(3)将时间指数n增加1,回到第一步骤,再重复上述计算步骤,一直达到稳为止。
由此可见,自适应LMS算法既不需要计算输入信号的相关函数,又不要求矩阵之逆的简单性,使其得到了广泛的应用。
3 应用效果分析
作为一台成熟的三维电阻率数据采集系统,应该既能在城市进行工程物探工作,又能在远离城市的地区进行金属矿的找矿工作。本文以直流脉冲式多阶梯状干扰为研究对象,进行自适应滤波法对这种干扰补偿的探讨。
图3是某矿区Ⅰ号剖面51—54号点干扰强度变化监控曲线图,干扰场呈阶梯状,脉冲式变化,多个突变。干扰强度分别为100 mV,150 mV,260 mV,320 mV,480 mV,640 mV,680 mV,890 mV 段以及>890 mV段,强度的增强和减弱毫无规律可言,叠加了大量的干扰。经过自适应滤波后的干扰强度变化见图4,可以看出,干扰强度在脉冲增强和减弱最大处明显减小,滤波后干扰强度分别减小为10 mV,30 mV,40 mV,60 mV,100 mV,140 mV,180 mV,220 mV段以及290 mV。干扰强度得到了很大的压制。
4 结论

图3 某矿区Ⅰ号剖面干扰强度变化曲线Fig.3 Variation curves of the intensity of disturbing in some mine field
本文采用了自适应滤波器对三维电阻率数据采集系统上的干扰场干扰强度进行实时补偿,该种滤波器通过不断地调整滤波器的权系数,使仪器内部的实时补偿电压随着时间变化,不断地抵消野外的干扰电压变化,使补偿误差达到最小,以有效地压制干扰,突出有用信号。经研究得出,自适应滤波器对接收到的干扰信号有很好的压制,本次尝试得出的应用效果也令人满意。虽然该种滤波器在其它领域已经非常地成熟,但在地球物理仪器方面的应用还不多,本文或可以对三维电阻率仪器数据采集系统的干扰强度进行实时补偿提供新的理论依据和方法。

图4 经自适应滤波后的干扰强度变化曲线Fig.4 Variation curves of the intensity of disturbing in some mine field after the adaptive filter
董宁.2009.自适应控制[M].北京:北京理工大学出版社.
郭文彬.2006.通信原理基于MATLABD的计算机仿真[M].北京:北京邮电大学出版社.
金和海.2006.鲍家火山盆地电法找铀矿效果与找矿前景分析[J].铀矿地质,22(06):361-367.
刘申芬,李天成,慕洪涛.2009.三维井地电阻率有限元数值模拟及反演[J].物探与化探,33(1):88-90.
马明建.2012.数据采集与处理技术[M].西安:西安交通大学出版社.
马维华.2006.嵌入式系统原理及应用[M].北京:北京邮电大学出版社.
潘仲明,丁浩,陈敏.2013.自适应LMS和相关算法在GMI磁传感器信号检测中的应用[J].国防科技大学学报,35(1):142-146.
汤洪志,刘庆成,尹志勇,等.2011.LQC-Ⅰ型三维电阻率测量系统实验研究[J].仪器仪表学报,32(5):1057-1062.
王永德,龙宪惠.2008.自适应信号处理[M].北京:机械工业出版社.
吴利斌.2007.电子技术基础[M].北京:国防工业出版社:77-82.
西蒙赫金.2003.自适应滤波器原理[M].4版.北京:电子工业出版社.
杨再立,汤洪志,刘春来,等.2013.LQC-Ⅱ三维电阻率采集系统及其应用研究[J].工程地球物理学报,10(2):144-150.
郑顾平,杜向楠.2011.基于LMS自适应滤波的零序电流去噪研究与实现[J].电力科学与工程,27(12):27-31.
周小仙.2009.三维电阻率层析成像应用初探[J].工程地球物理学报,6(5):549-555.
Bonnie C,Baker.1999.Analog filters for data acquisition systems[M].Antialiasing Microchip.