一种基于RDSS的车船监控管理系统的设计与实现*
2013-10-10范媚君
张 婷,栗 靖,范媚君,2,宋 倩
(1.北京环球信息应用开发中心,北京100094;2信息工程大学测绘学院,河南 郑州450052)
0 引 言
车船监控管理系统是一项集卫星定位技术、地理信息技术(GIS)和现代通信技术于一体的高科技项目,它将移动目标的动态位置(经度与纬度)、时间和状态等信息,实时地通过无线通信链路传送至地面中心。而后在具有地理信息查询功能的电子地图上进行移动目标运动轨迹的显示,并对目标的位置、速度、运动方向和车辆状态等参数进行监控和查询。目前此类系统主要采用的是GPS/GSM技术,即全球定位系统和全球移动通信系统[1]。虽然GPS是被动式导航定位,用户数量不受限制,但因其无法实现通信功能,所以定位数据的传输就需要采取其它手段,目前利用GSM进行通信,但GSM最大的缺点是存在盲区,尤其是在一些边远地区,车船等在行进的过程中很可能长时间收不到GSM信号。另外出于战略方面的考虑,在某些特定时期(比如战争)美国可能关闭GPS卫星定位信号,这势必会对我国经济的稳定运行造成极大的损失。设计开发和广泛应用RDSS系统能较好的解决这些问题。
1 RDSS系统概况
1.1 系统组成
服务于用户位置确定的卫星无线电业务有两种方式,一种是RNSS,即卫星无线电导航业务;另一种是RDSS,即卫星无线电测定业务。RDSS系统由空间部分、地面控制管理部分及用户终端三大部分组成,如图1所示。空间部分由地球静止轨道卫星组成。地面控制管理部分是整个系统的管理控制处理中心,同时与空间段的工作卫星进行双向通信,完成对每个用户的精确定位,并接收经卫星转发的用户入站信号。各种类型的用户机是整个系统的用户终端,可用于陆地、海洋和空中的各种用户,满足用户对定位(导航)、授时等方面的需求[2]。
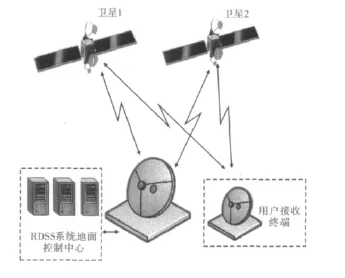
图1 RDSS系统组成图
1.2 系统的主要功能
RDSS系统可以为各种用户提供两大服务功能:快速定位、精密授时。
定位:RDSS系统可为服务区域内用户提供全天候、高精度、快速实时定位服务,定位精度与GPS相当。
授时:RDSS系统可根据不同的精度要求,利用授时终端,完成用户与RDSS系统之间的时间和频率同步,可向用户提供钠秒级的时间同步精度[3]。
2 车船监控管理系统总体架构
2.1 系统组成
车船监控管理系统由用户终端、网管中心及用户调度管理中心组成[4],如图2所示。
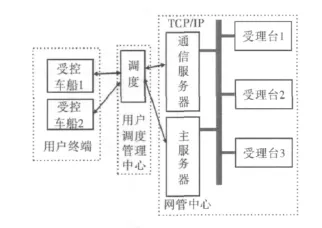
图2 地面控制中心结构图
1)用户终端
用户终端主要是面向用户提供卫星定位导航和授时功能的用户终端设备。通过用户终端能够实现RDSS系统的定位、导航、授时等功能。该系统设计研发的用户终端设备的首次捕获时间、接收频道数、发射EIRP值、发射频率偏移、接收信号误码率、最大发射功率、功耗电源等技术指标比以往都得到了提升。
2)网管中心
网管中心作为车船监控管理系统的核心,主要提供高效的信息处理、信息分发和应用等服务,并能够提供一套完善的信息通信服务的接入平台。网管中心负责所有RDSS系统的业务信息的处理,以及用户的注册管理、业务接续处理、计费处理和运营管理等。网管中心采取主地面中心+受理台相结合的C/S结构联合控制的工作模式。主地面中心由数据库子系统、通信子系统、呼叫受理子系统组成;受理台由通信子系统、GIS子系统地面中心[5]、通过专线组成网络的各受理台。车船监控管理系统由网管中心实现群体调度、联网报警和可靠性。
3)用户调度管理中心
用户调度管理中心实现对所有用户终端的移动目标如车辆、船只等的监控、调度、通信、授时等功能。
2.2 车船监控管理系统工作流程
1)地面中心站向卫星连续发送载波,载波上的数据流含有测距信号、电文帧、时间码等,可称为询问信号;
2)询问信号经卫星变频放大,转发到终端设备;
3)终端设备接收询问信号,并注入必要的信息,向空间段的卫星发送;
4)卫星将收到的终端站的信息转发到地面中心站;
5)地面中心站处理收到的终端站发来的信息,即计算终端站的坐标,将坐标信息连同终端站的其它信息,全部发送到网管中心;
6)网管中心对终端站的信息进行校验和处理,实现信息交换;
7)网管中心将处理的信息送地面中心站,再经卫星传送给用户终端[6]。
2.3 车船监控管理系统主要功能
1)定位跟踪:可实现对移动终端的单次定位查询以及连续定位跟踪,连续定位的时间间隔可以任意设定;
2)指挥调度:监控中心可通过终端设备的通话手柄,对移动终端实施语音或数字指挥调度;
3)数据报表输出:每日、每月的报警表格记录输出,报警地点地图,用户使用情况报表、登录注销表输出;
4)网络管理:主地面中心与受理台的网络管理;
5)信息调配:地面中心拥有全部用户的资料及全部服务区域的地理信息、辅助信息、可对全网系统资源进行调度。对同时实现各种跟踪的用户数在各用户监控中心之间进行调配;
6)历史轨迹回放:将移动终端以往任意时间段的运行轨迹加以回放,并可调节轨迹回放速度。
3 车船监控管理系统的设计
3.1 软件设计
在总体上,该系统采用了用客户端/服务器结构。利用 Windows Sockets、MAPX、TCP/IP网络和大型数据库等技术来实现“RDSS”与GPS的融合,扩大其应用范围。软件流程如图3所示。
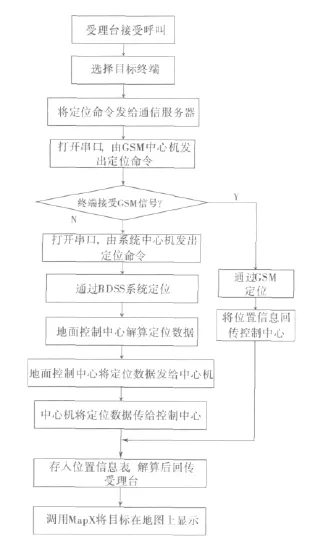
图3 系统软件设计流程图
3.2 网络协议设计
网络协议选择于TCP/IP的数据网关,主要目的是在进程对之间提供可靠的逻辑电路,即连接服务。协议的制订遵循以下原则:
1)健壮性:由于要考虑到网络的连接不稳定性,在容易出错时保证运行的可靠性;
2)解码算法的简单性:接收到的数据要进行多项处理,在时间上有较高的要求,解码要求简单,但同时整个帧长也不宜过长;
3)可扩展性:指在不影响原有协议整体结构基础上,添加新的功能或修改原有功能的能力[6]。
3.3 数据库管理设计
数据库的管理采用微软ODBC标准下的ADO数据接口,在考虑系统性价比的前提下,经过论证,采用 MSSQLSERVER2000数据库,该数据库强大的功能不仅能够满足服务用户的管理和调度,而且方便对操作员的登录信息进行管理和数据库系统的维护。
4 结 论
基于RDSS系统定位技术的车船监控管理系统克服了GSM存在盲区的问题,信号遮挡情况下还需辅助技术;并且能够有效的利用RDSS系统的信号通道实现数据传输的功能,自主实现了对车船等RDSS系统移动用户终端的监控、指挥和调度。
[1] 谭述森.卫星导航定位工程[M].北京:国防工业出版社,2010.
[2] 吴延忠,李贵琦著,地球同步卫星定位[M].北京:解放军出版社,1992.
[3] 付梦印,王美玲,吴 江,等.利用GPS卫星信号测量车辆航向[J].传感器世界,1997(10):12-15.
[4] 于国强,邱致和.导航与定位[M].北京:国防工业出版社,2000:215-216.
[5] 总装备部卫星有效载荷及应用技术专业组应用技术分组.卫星应用现状与发展(上册)[M].北京:中国科学技术出版社,2001.
[6] 陈振国.卫星通信系统与技术[M].北京:北京邮电大学出版社,2003.