基于3 D网络游戏引擎的应急演练系统*
2013-09-29陈建刚徐守祥黄国伟
陈建刚 ,徐守祥 ,黄国伟 ,何 涛
(1.深圳信息职业技术学院 计算机学院,广东 深圳 518172;2.深圳信息职业技术学院 数字媒体学院,广东 深圳 518172;3.深圳信息职业技术学院 软件学院,广东 深圳 518172)
真实应急演练存在成本高、风险大和不能循环利用等缺点,构建虚拟应急演练成为当前应急演练的一个趋势[1]。虚拟应急演练是基于信息技术模拟真实演练的系统,目标是实现安全生产的岗位培训和应急指挥的决策支持。目前,虚拟应急演练系统主要基于数据库技术和地理信息技术的决策支持,随着虚拟现实技术的逐渐成熟,以分布式虚拟环境[2-3]为基础的应急演练系统逐步成为市场关注的热点[4]。
由于网络游戏具有协同性和实时性等特点,采用网络游戏引擎实现应急演练系统成为可能。徐守祥[5]等以火灾软件模型和数字城市为基础,针对消防演练和火灾科学研究的虚拟现实应用,提出了基于3D网络游戏引擎的消防虚拟现实体系结构。贺日兴[6]等基于游戏引擎技术实现了地铁3维虚拟演练系统。SMITH S P[7]认为第一人称射击类游戏FPS(First Personal Shooter)非常适合建立演练环境,率先提出使用计算机游戏开发建立虚拟环境快速原型的思想,并以此方法于2009年建立了火灾撤离训练演示系统[8]。这些系统大都关注角色的技能培训方面,如消防员如何训练灭火流程。为了满足应急演练过程中应急指挥和部门间的协同配合需要,本文在3D网络游戏引擎和灾害仿真技术基础上,根据应急预案处置流程搭建出应急演练系统。
细胞自动机被广泛用于火灾蔓延过程[9],黄光球[10]等提出了基于细胞自动机模型的地下矿火灾发生时火灾在巷道网络系统中蔓延的可视化仿真方法,孟晓静[11]等构建了基于细胞自动机的城市地震次生火灾蔓延概率模型。这些研究都是根据灾害场景特点进行建模,没有结合灾害模型进行讨论。本文将细胞自动机和灾害模型相结合实现火灾蔓延过程。
1 系统框架及功能模块
本应急演练系统基于Torque 3D游戏引擎设计。系统功能可分成8个子系统,其总体结构框图如图1所示。其中,角色子系统包含演练所涉及角色,包括客户端控制类和AI类,客户端控制类包括各参演单位的领导、工作人员领队、演练编导和演练指挥领导等;而AI类角色则包括各参演单位的工作人员。粒子特效子系统管理场景所涉及粒子系统包括烟雾、毒气、火和喷射水等。在这些子系统基础上实现应急演练的逻辑功能。

图1 系统总体的结构框图
图2给出了虚拟应急演练系统功能模块的划分,下面简单介绍各模块功能。

图2 虚拟应急演练功能模块流程
(1)场景编辑模块
该模块的功能是布置演练场景,包括设置演练天气及其变化情况、灾害模型、参演单位及人数、设备配置和受灾场地布局等。其中,天气变化情况设置风力和风向变化情况,灾害模型通过传入的外界作用参数根据模型进行演化。
(2)灾害产生及蔓延模块
该模块主要根据灾害数学模型,采用细胞自动机机制模拟出灾害产生及蔓延过程,参见本文第2节。
(3)事件接报模块
本模块功能为应急办工作人员接报警及上报事件,该模块角色应能根据事态发展生成事态报告,实时汇报给决策者。
(4)事件分析研判模块
专家领导根据汇报的事态,结合现场视频,对事态走势进行分析,包括天气情况、救援队伍及救援情况、灾害影响分析和场地分析等,最终得出研判报告。
(5)决策标绘模块
应急指挥领导根据研判报告进行决策,各参演单位根据决策结果在场景中进行标绘。
(6)演练执行模块
决策标绘完成后进入演练执行模块,该模块提供参演单位角色之间的对话通信功能,各参演单位根据标绘结果展开救援。涉及的技术点包括施救方案(如消防员如何灭火,如何营救被困人员,医护人员如何现场救治伤员)以及人员疏散策略(周边受影响的人员的疏散策略)等。
(7)数据采集模块
系统实时采集场景数据,跟踪灾害事态变化。采集的信息包括现场被困人员情况、灾害覆盖范围、现场救援情况和环境数据等,以供专家、领导进一步研判和决策。该模块也为演练总结、处置预案生成等提供手段。
(8)事件注入模块
事件注入包括人为注入事件和捕捉的环境数据注入,人为注入事件是指编导角色在演练过程中改变场景的某些设置(如演练前为晴天,在演练进行中改为雨天,风力改变等)以及指派某一突发事件等。而捕捉的环境数据注入是指通过传感设备采集到的外界数据,经过系统预处理,转换成场景内部环境数据,如外界温度、湿度、风力、风向等。
(9)演练总结模块
演练结束后进行总结,总结的内容包括根据应急预案的处置流程对参演单位进行评估考核,检验参演单位对突发事件的应急处理能力和协同配合能力。
2 关键技术
2.1 灾害伤害模型
本系统目前实现了池火灾伤害模型和毒物扩散伤害模型,现以池火灾伤害模型[12]为例进行简单介绍。
池火灾伤害模型如图3所示。易燃液体储罐进行装卸、存储过程中,有可能发生易燃液体泄漏并引发火灾事故。池火灾伤害模型以这类事故为研究对象,可应用于确定池火热辐射对人员财物的伤害程度等方面。在池火模型中,池火以圆柱形火焰的形式进行描述、建模,并假设池火热辐射均匀向外扩散;而池火对周围人员、环境的影响可由池火表面热通量q0与目标接受热通量 q(r)共同描述。
池火表面热通量q0刻画了池火火焰表面散发的热量,池火表面热通量越大,则其影响的范围将越广。池火表面热通量的计算公式为:
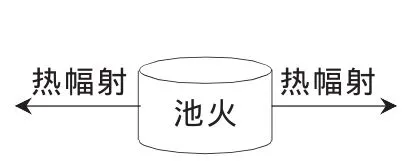
图3 池火灾伤害模型

其中,L为池火火焰高度,D为池火直径,mf为易燃液体的燃烧速率,ΔHc为易燃液体的燃烧热,f为热辐射系数。
目标接收的热通量q(r)刻画了池火所产生的热辐射对周围物体的影响,目标距离池火越近,其接收的热通量将越多,受到的伤害也将越大。目标接收热通量的计算公式为:

其中,r为目标到池火中心的水平距离,V为目标的视角系数。
在本演练系统中,通过将式(2)与演练设置的相关参数(如储罐存储液体类型、储罐储量、储罐泄漏量、人员距离池火的水平距离)相结合,确定储罐池火的热辐射对位于不同距离之外事物的影响程度,并以直观的形式在演练场景中进行表现,并以此作为后续灾害蔓延和扑救依据。
(1)在池火的表面热通量与场景池火的火焰粒子系统之间建立数学映射关系,通过对火焰粒子系统的参数进行调整,模拟火势的大小与火势的动态变化。
(2)根据目标接收的热通量,将池火的影响范围划分为死亡、重伤、轻伤和安全4个范围,并在演练场景中通过不同颜色的圆圈进行标识。系统根据火势发展,对池火的上述影响范围进行动态更新,帮助参与演练者及时掌握火势的发展情况。
2.2 基于细胞自动机模拟灾害蔓延及伤害模型
对于灾害蔓延过程,将场景中事故涉及点分为多个相互连通的网格,每个网格根据其燃烧特性(如物品的易燃情况)排放细胞出生点,结合环境因素确定细胞自动机的动力演化方程,将这些方程转换到3D引擎中粒子系统的参数中,生成相应的粒子系统蔓延过程。
细胞自动机一般由细胞空间、细胞的状态空间、细胞邻居及局部演化规则4部分组成[11],可用一个四元组(Ld,S,V,f)表示。 其中,Ld为细胞空间,d 为细胞空间的维数;S为细胞的有限状态集;V表示一个所有邻域内细胞的组合;f表示细胞自动机的动力演化方程,该演化方程是根据细胞当前状态及其邻居状态确定下一时刻该细胞状态的演化规则。
对于池火灾模型而言,考虑到易燃液体的存储布局,灾害蔓延可在二维平面模拟,因而只需考虑二维CA模型,即d=2。二维CA模型的细胞空间拓扑结构采用平面方形网格,每个网格代表一个CA模型的细胞,每个细胞定义为Cij,整个细胞空间定义为:

通常二维细胞自动机考虑两种邻域:一种是Von Neumann邻域,由一个中心细胞和4个位于其东西南北方位的细胞组成;另一种是Moore邻域,它还包括次邻近的位于东北、西北、东南和西南方位的4个细胞。对于位置为(m,n)处的细胞,V的取值组合如表1所示。
(1)灾害蔓延过程
对于灾害蔓延过程的细胞自动机而言,S只有{0,1}两种状态,其中0表示没有起火,1表示起火。起火后,火势大小只与该细胞自身因素和环境因素有关,而与周边的火势无关。
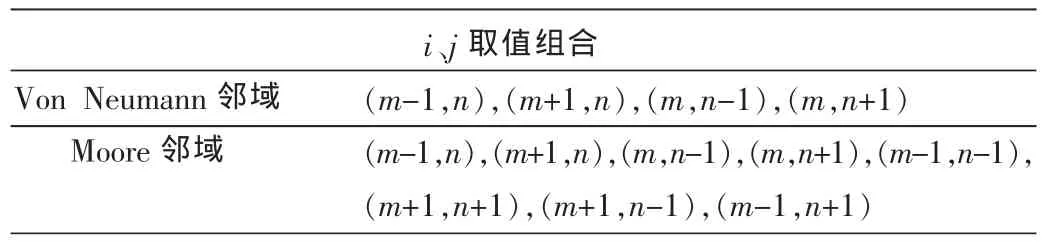
表1 (m,n)位置处不同邻域的取值组合
根据式(2),灾害蔓延的动力演化方程可表示为:

其中,wi,j表示周边细胞的权重系数,该权重系数由风力、风向和天气等环境因素决定。当采用不同邻域模型时,i、j取值也不同,如表1所示。根据储罐排列方式决定采用哪种邻域。
当q(r)超过细胞的伤害阈值时,该细胞的状态S由0变为1,表示该细胞起火。
(2)伤害模型
对于伤害模型的细胞自动机,S表示细胞产生的伤害程度,将细胞产生的伤害程度划分为 {致命伤害,重伤,轻伤,安全}4种状态,用目标接收的热通量值表示这4种范围。
根据式(2),伤害模型的动力演化方程可表示为:

当q(r)超过人员对应的伤害阈值时,该人员就进入相应的伤害状态。由式(5)可以看出,伤害状态只会严重,而不会减弱。
2.3 基于势函数的灭火流程
对AI角色而言,若要达到最佳灭火效果,需要靠近火源,由上述伤害模型可知,火势对AI角色的伤害会增大。需寻找合适距离以保证既能产生灭火功效,又能规避伤害。这种情况与势函数模型相吻合,势函数表示为:

对于灭火场景,相应的势函数可表示为

其中,参数A、B可分别根据灭火设备喷射的粒子系统的属性和火粒子系统的属性预定设定。采用势函数方法实现AI消防人员自动灭火过程,将火势对人的伤害作为斥力分量,将灭火器灭火功效作为引力分量,通过控制AI角色在规避伤害前提下,根据火势大小不断调整AI角色与火源距离,实现AI角色的自动灭火过程。
3 结果展示
根据上述功能,本文实现了基于3D网络游戏引擎的应急演练系统,系统模拟的部分结果如图4所示。其中图 4(a)、图 4(b)为灾害产生及蔓延模块。采用细胞自动机模拟灾害蔓延及伤害过程,对于灾害蔓延过程,i、j取值采用Von Neumann邻域,设定储罐起火阈值,当接收相邻储罐的热通量达到阈值时,该储罐起火。同样,设定在场人员的轻伤、重伤和致命伤害的伤害阈值,当接收储罐的热通量达到对应阈值时,人员就进入相应的伤害状态。图4(c)为演练执行模块,实现了基于势函数的灭火流程。

图4 应急演练系统的模拟结果
与其他虚拟应急演练系统相比,本系统由于实现了场景编辑和突发事件功能,因而适用范围更广,更能体现应急演练的效果。同时,本系统以应急预案和灾害模型为依据,更具有科学性。下一步将考虑与GIS相结合,实现对真实灾害场景的模拟与标绘,使系统能够进一步实用化。
[1]丛北华,廖光煌,韦亚星.计算机模拟在火灾科学与工程研究中的应用[J].防灾减灾工程学报,2003,23(2):63-69.
[2]STYTX M.Distributed virtualenvironment[J].IEEE Computer Graphics and Application, 1996, 16(3):19-31.
[3]潘志庚,姜晓红,张明敏,等.分布式虚拟环境综述[J].软件学报, 2000, 11(4):461-467.
[4]李建微,陈崇成,唐丽玉.协同森林灭火演练系统的实现及其关键技术研究[J].计算机仿真,2005,22(1):170-174.
[5]徐守祥,梁永生,刘晓东.基于火灾模型的消防虚拟现实体系结构[J].系统仿真学报,2009,21(1):255-258.
[6]贺日兴,李家龙,董红路,等.基于游戏引擎技术的地铁3维虚拟演练系统的开发与实现 [J].地理信息世界,2008(3):48-53.
[7]TRENHOLME D,SMITH S P.Computer game engines for developing first-person virtualenvironments [J].Virtual Reality, 2008(12):181-187.
[8]SMITH S P,TRENHOLME D.Rapid prototyping a virtual fire drill environment using computer game technology[J].Fire Safety Journal,2009,44(4):559-569.
[9]HERNA’ A, NDEZ, ENCINAS, et al.Simulation of forest fire fronts using cellular automata [J]. Advances in Engineering Software, 2007(38): 372-378.
[10]黄光球,汪晓海,陈惠明.基于细胞自动机的地下矿火灾 蔓 延 仿 真 方 法 [J].系 统 仿 真 学 报 ,2007,19(1):201-205.
[11]孟晓静,杨立中,李健.基于细胞自动机的城市区域火蔓延概率模型探讨 [J].中国安全科学学报,2008,18(2):28-33.
[12]李俊侃.海南省重大危险源研究[M].北京:煤炭工业出版社,2009.