基于地面检校场的POS辅助空三精度分析
2013-09-28冯德俊杨健霆
张 恒,冯德俊,杨健霆
(1.西南交通大学 测量工程系,四川 成都 610031)
POS辅助航空摄影测量中,由于POS所获取的是在惯性坐标系下的位置和姿态数据,而摄影测量中所需的则是在摄影测量坐标系下的位置和姿态数据,即外方位元素,因此需要将POS所获得的数据转换到摄影测量坐标系中[1]。通常的做法是通过飞行检校场来获取IMU及航摄仪之间的偏心角和偏心距,进而实现两坐标系的转换,因此检校场的布设方案在POS辅助航空摄影测量中至关重要,所获得检校数据的精度直接决定了后续空三加密以及测图的精度。
国外的一些公司提出了布设检校场的建议方案,如德国IGI公司提出通过布设2条对向飞行航线,其旁向、航向重叠均为60%的方法来建立检校场的方案[2];加拿大Applanix公司提出旁向、航向重叠可以按照常规布设,即旁向30%、航向60%,选取测区内2条或4条平行或交叉的航线来布设检校场[3]。国内也有相关研究,李瑞芳建立专用的集成系统检校场[4];宗伟丽针对DMCⅡ230数字航摄仪,按照常规的旁向航线重叠率布设4条平行对飞航线和2条垂直交叉航线来建立检校场[5],然而这些方法并没有对检校后的数据作深入的分析和对比。
本文在863重点项目专用系统集成检校场的基础上,参考加拿大Applanix公司和德国IGI公司的方案,分别布设了霍城和新源检校场,然后从残差和加密后的精度2方面分别对经3个检校场检校后的数据进行了分析和探讨,最后,给出了有关检校场布设方案选择的若干建议以供参考。
1 检校场的布设
1.1 涿州地面检校场
涿州地面检校场是863重点项目专用系统集成检校场,位于河北省涿州市,尺寸约为120 m×90 m的矩形区域,并在地面每隔数米等间距地布设高精度控制点,在场地的一端竖起一台高约50 m、塔臂长约55 m的塔吊,悬挂于塔臂的吊舱既可以搭载国产POS与SWDC-4等航摄集成设备又可以充分模拟飞机飞行时的姿态。该检校场是基于50 m高处2幅影像重叠率为60%而设计的,GSD≈6 mm,其优势在于,每张影像上像控点多,理论上可达200多个,但实际自动匹配过程中一般为160个左右,这就为获得相片精确的外方位元素提供了有力的保障。另外,该检校场的所有控制部分位于地面,便于操作,飞行成本低廉,便于维护。
1.2 霍城空对地检校场
新疆霍城空对地检校场是参考加拿大Applanix公司的方案布设的,具体方案如下:
1)选取摄区的2条平行航线,其中每条航线上均有15张片子,2条航线的航向重叠为65%,旁向重叠35%。
2)在检校场的周边布设有15个平高控制点,控制点的间隔不超过3条基线,均位于相片标准点位上,航摄飞行高度与摄区高度相同。
需要注意的是,选取2条平行航线需采用对向飞行的方式,其目的在于消除与航线有关的误差,如时间同步误差、偏心距测量误差等[6]。
1.3 新源空对地检校场
新源空对地检校场是参考德国IGI公司的方案布设的,具体方案如下:
1)检校场应按照比例尺设置2条相邻的平行航线,每条航线13个像对;
2) 保证航向重叠和旁向重叠均为60%;
3)在检校场的周边布设9个平高控制点,相邻像控点的间隔不超过3条基线,控制点点位距相片边缘约为相片宽的20%;
4) 航摄飞行高度与摄区高度相同。
其中,加大旁向重叠进行高冗余航摄,主要是考虑到60%的重叠度下可确保检校场内每张航片的投影中心均处于4°或6°重叠区域内,可有效消除物镜畸变,有利于提高外方位元素的精度[7]。
2 项目概况
航飞的测区位于新疆伊犁州霍城和新源,地形类别主要为丘陵,其中霍城测区的面积约为900 km2,新源测区的航飞面积约为1 700 km2,所采用的飞行器是由新疆通用航空有限责任公司提供的运-5运输机,航摄设备使用中国航天科工集团公司第三十三研究所研发的激光POS、惯性稳定平台与中国测绘科学研究院北京四维远见信息技术有限公司研发的新型SWDC-4数字航空摄影相机。其中,新型SWDC-4数字航空摄影相机的焦距为50.2 mm,影像分辨率为10 000×14 500像素,像元分辨率为6.8 μm[8];机载GPS和地面基站均采用Trimble 5700型双频GPS接收机同步配合,其采样频率均为10 Hz。
本项目首先在5月22日使用涿州检校场来获取航摄仪与POS之间的偏心分量,并在6月9日抵达霍城进行航飞,抵达新源测区的时间为7月6日,在整个项目的过程中,国产POS与SWDC-4相机等航摄设备均为刚性连接,中间并没有拆卸仪器。霍城与新源2个测区所要求的航摄指标一致,具体情况见表1。
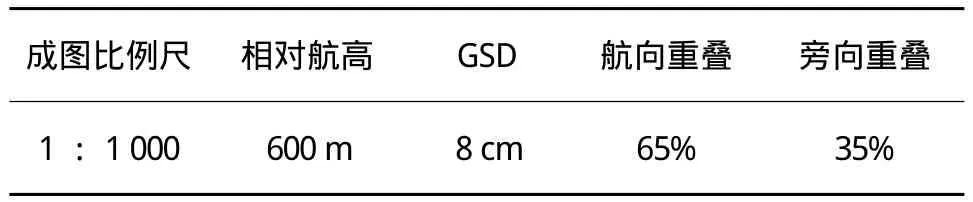
表1 航摄具体情况统计表
3 试验结果与分析
在将GPS数据与IMU数据采用卡尔曼滤波进行融合之后,使用检校场中影像的单片后交(涿州检校场)或空三(霍城、新源检校场)结果作为真值,采用自主研发的组合导航系统POS和数码相机集成检校——ORIM软件来获取检校场中每张影像的偏心分量,然后求出所有影像的偏心分量的均值作为真值,并将其改正到融合之后的结果,从而得到整个测区的外方位元素。这样,只需在检校场范围内进行空三加密和外业控制测量,获得系统误差值的改正量,就可以实现在整个摄区的无(或少)地面控制的航空摄影测量了。

式中,xi为第i张影像的偏心分量;n为检校场中影像的数量;为偏心分量的均值。
使用式(1)计算得出的系统差中误差如表2所示,可得到如下的结论:
1)我国现行《IMU/GPS辅助航空摄影技术规范》中对于1∶1 000比例尺的偏心分量系统差中误差的要求是偏心距不大于0.5 m,角元素中侧滚、俯仰角不大于0.03°,航偏角不大于0.02°[9]。由此可看出3种布设方案的检校场均能满足要求。
2)从总体上来看,新源检校场得出的数据比涿州检校场的离散程度低。
3)用霍城检校场解算出3个方向的偏心距中,东方向不够稳定。
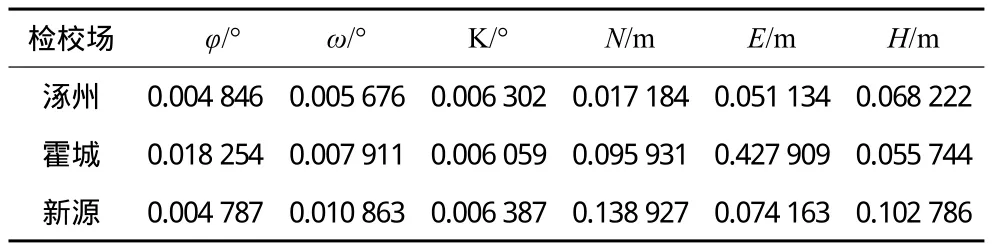
表2 3种检校场所求得的偏心分量系统差中误差统计表
将检校后的数据作为初始值,使其与像点坐标观测值进行联合平差,以整体确定地面目标点的三维空间坐标和6个外方位元素,从而实现少量或无地面控制点的摄影测量区域网平差[10],这就是POS辅助空中三角测量的优势。将检校后获得的影像外方位元素作为带权观测值,并使用TG-AT软件进行光束法平差,最终输出测区定向点和检查点的误差。由各检校场所获得的测区空三试验结果如表3所示。 由于测区范围大,测区内的高程有较大起伏,所以在做航线设计与空三的时候是分区进行的,考虑到使用单个区域的空三数据不具有代表性,因此选用数个区域检查点中误差的均值作为最终的中误差。为减少其他方面对空三结果的影响,每个区域中控制点的数量、布设方法、权重,以及附加参数个数、检查点的数量均保持一致。
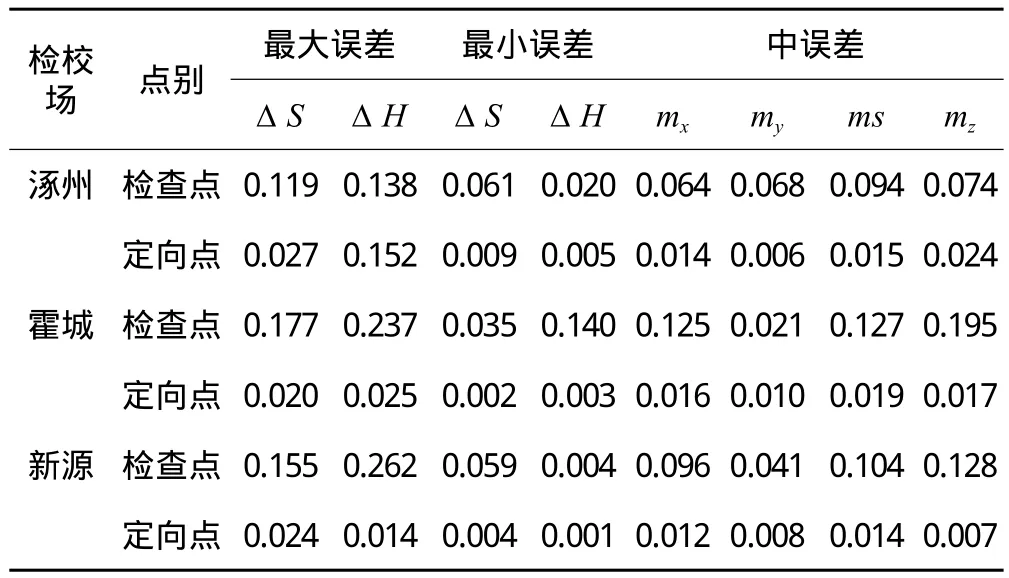
表3 测区空三结果统计表/ m
1)我国现行《数字航空摄影测量空中三角测量规范》中对于1∶1 000比例尺丘陵地区地形图航测内业加密的要求是,基本定向点平面中误差≤0.3 m、高程≤0.26 m,检查点平面中误差≤0.5 m、高程≤0.4 m[11],3种检校场均能满足要求。
2)3个检校场平面精度相当,而在高程方面,2个空对地检校场中,霍城的精度比新源低,这是因为霍城检校场中旁向重叠为20%~30%,航线间高程的连接强度较低,而新源检校场60%的旁向重叠足以保证航线间的连接强度,进而提高了高程精度。
3)涿州地面检校场中由于控制点的精度高并且布设得比较密集,因此其解算出来的外方位元素准确,进而可得到精确的检校参数。
4)涿州检校场获取的并非是航摄当天的检校参数,然而测区的空三结果显示POS数据良好,这说明在运输路途中,仪器设备间的连接牢固,并未发生相对移动,同时也说明在刚性连接的前提下,飞行一次检校场所获得的检校数据可以用于其余架次的检校。
4 结 语
本文通过具体的工程项目验证了3种不同布设方案检校场的可行性,主要从残差以及最终的空三数据质量2个方面加以验证,并分析了3种检校场各自的精度。通过地对地模拟飞行检校场精度的验证表明,在航飞作业之前可以采用地对地模拟飞行检校场,这样可以大大节省成本。
[1]刘力荣.国产POS与数字航空相机集成检校与试验研究[D].北京:中国测绘科学研究院,2012
[2]李学友,倪忠礼.IMU/DGPS辅助航空摄影测量中检校场布设方案研究[J].测绘工程,2005(4):14-18
[3]李学友.IMU/DGPS辅助航空摄影测量原理、方法及实践[D].郑州:中国人民解放军信息工程大学,2005
[4]李瑞芳,关艳玲,左建章.高精度轻小型航空遥感集成系统室外检校场建设方案研究[J].测绘科学,2010,35(6):65-66
[5]宗伟丽,甘俊.DMC230检校场布设方案及检校精度分析[J].铁道勘测,2011(5):29-31
[6]姚继峰.多传感器集成检校的理论方法与实践[D].青岛:山东科技大学,2011
[7]郭大海,王建超,郑雄伟.机载POS系统直接地理定位技术理论与实践[M].北京:地质出版社,2009
[8]黄贤忠,张建霞,刘宗杰.国产SWDC航空数码相机及其应用[J].测绘通报,2009(9):41-43
[9]GB/T 27919-2011.IMU/GPS辅助航空摄影技术规范[S].北京:中国标准出版社,2012
[10]袁修孝.POS辅助光束法区域网平差[J].测绘学报,2008,37(2):342-348
[11]GB/I 23236-2009.数字航空摄影测量空中三角测量规范[S].北京:中国标准出版社,2009
