一种利用海豚叫声的仿生水声通信方法*
2013-09-27刘凇佐乔钢尹艳玲
刘凇佐 乔钢 尹艳玲
(哈尔滨工程大学,水声技术重点实验室,哈尔滨150001)
(2012年12月2日收到;2013年2月4日收到修改稿)
1 引言
水声通信网[1]在海洋环境监测、自然灾害预警、港口及近岸检测、特别是对于水下侦察与作战群体的管理、指挥与调试等方面都有十分重要的作用.为防止水声通信网工作时节点暴露、非友好节点接入或节点间交互信息时被侦听,水下通信时对隐蔽性的要求越来越高.
如何实现水下通信功能又不被发现是一个具有意义的研究课题,欧洲七国联合承担的UCAU(UUV covert acoustic communication)项目[2]研究的核心内容就是隐蔽水下通信.通常水下隐蔽通信方法是使通信信号隐藏于背景噪声中,即低信噪比条件下的隐蔽通信,如文献[3]研究了多载波扩频隐蔽水声通信技术,文献[4]研究了直接序列扩频结合RAKE接收机技术的低检测概率条件下的隐蔽水声通信技术,文献[5,6]研究了多子带OFDM隐蔽水下通信技术,利用频率分集合并提高处理增益.这些技术均是研究在固定载波调制下的低信噪比隐蔽水下通信技术.由于水声信道的时间扩展、频率扩展以及严重的衰减特性,相同声源级的信号不能实现在不同距离上的隐蔽通信,尤其当收发节点间存在监听设备时,将无法实现隐蔽通信.
针对传统隐蔽水声通信方法存在的问题,本文提出仿生伪装的方法,采用海洋中固有的海豚叫声信号作为信息载体,允许通信信号被探测到,但在识别过程中被当作海洋生物噪声排除,达到隐蔽通信的效果,尝试解决水下隐蔽通信问题.研究了海豚叫声信号特点,利用海豚哨声和嘀嗒声[7]信号实现通信功能.对海豚叫声信号进行分割,提取出独立的嘀嗒声信号,借鉴脉位调制技术[8],改进其信息码元形式,利用海豚嘀嗒声作为脉冲信号进行通信,信息调制在相邻嘀嗒声的时间间隔上,调制后的信号与原始海豚叫声信号在声音上没有明显区别,具有更高的隐蔽性.
由于海豚嘀嗒声信号不是固定载波,为克服时变、频变、空变水声信道对接收信号造成的影响,不适合采用判决反馈等信道均衡[9]方法,本文采用压缩感知理论(compressed sensing,CS)[10,11]下的匹配追踪算法(matching pursuit,MP)[12]在时域进行信道估计,利用虚拟时反镜技术[13]实现信道均衡.理论研究和湖上实验证实了采用仿生学伪装的手段实现水声隐蔽通信的可行性和有效性.
2 海豚叫声信号分析
海豚的叫声信号可以分为三类:被称为“哨声”(whistle)的通讯信号、被称为“嘀嗒声”(click)的定位信号以及应急和模拟信号[14].通讯信号一般持续时间从几百毫秒到几秒,其主要能量集中在声频范围内,是一种调幅和调频脉冲信号.定位信号一般持续时间从几十毫秒到上百毫秒,信号能量集中在较宽的超声频范围内,在应急和模拟信号方面研究的较少,一般是生物学家感兴趣的领域.对采集到的海豚哨声和嘀嗒声信号进行短时傅里叶分析,得到信号的时域波形图和短时频谱如图1和图2所示.
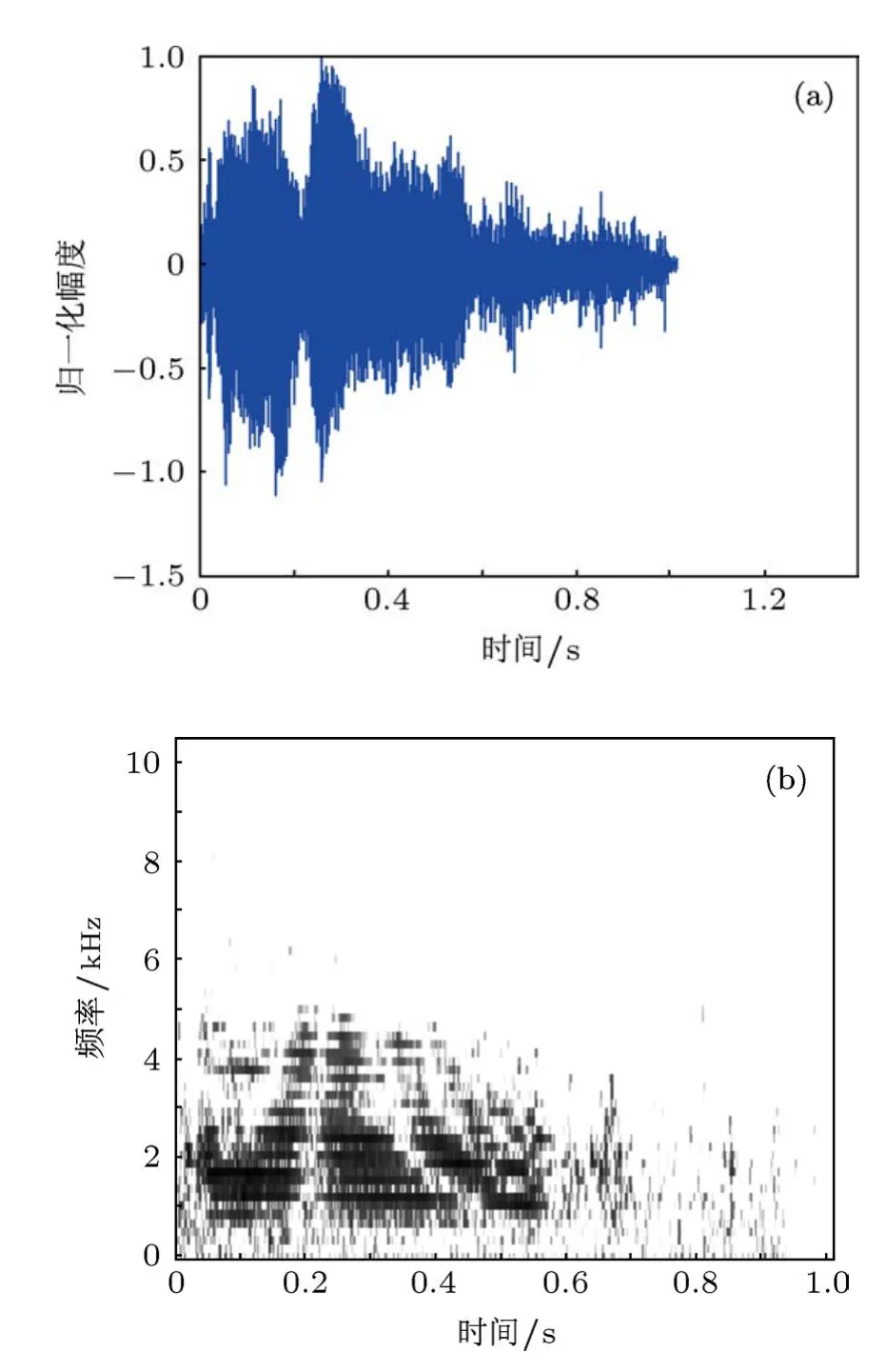
图1 海豚哨声信号时域波形与短时频谱 (a)哨声信号时域波形;(b)哨声信号短时频谱
从图1可以看出,海豚的哨声信号具有持续时间长(秒量级)、带宽大的特点,同时每个海豚哨声信号谱具有不同的包络特性[15],基于此种特性,利用海豚哨声信号实现仿生通信的信号同步与识别功能.
图2给出了22个不同的嘀嗒声的时域波形和短时频谱图,嘀嗒声信号持续时间短(100—200 ms),带宽从几百赫兹到数千赫兹.本文将信息以时延差的形式调制在相邻的嘀嗒声信号之间,以不破坏每个海豚嘀嗒叫声信号的特点为前提,通过改变不同嘀嗒声在时域上的位置,来实现信息调制.

图2 海豚嘀嗒声信号时域波形与短时频谱 (a)嘀嗒声信号时域波形;(b)嘀嗒声信号短时频谱
在具体的通信过程中,为实现仿生伪装隐蔽通信的效果,根据实际情况的需要选择合适的海豚叫声信号.例如,在不同海域应选择本地的海豚叫声信号用于通信;在不同季节应选择当季的海豚叫声信号用于通信;为了提高通信速率、抑制相邻码元间的多途干扰,应选择相关性良好的海豚叫声样本用于通信.所以,需要事先建立一个基于海豚叫声的仿生信号库,这样,在具体的通信过程中只需要从该库中选择适当的叫声信号用于通信.
3 基于海豚叫声的仿生水声通信系统方案
3.1 仿生水声通信信号帧结构
基于海豚叫声的仿生伪装水声通信信号帧结构包括两部分,一部分是由哨声信号组成的同步序列,另一部分是由海豚嘀嗒声信号组成的信息编码序列,在这两部分之间插入空白信号作为保护间隔,防止多径引起同步信号与信息序列之间的干扰.具体结构如图3所示.
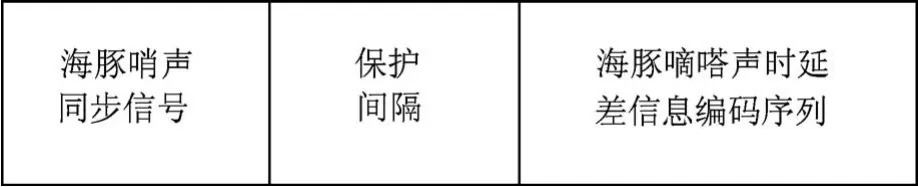
图3 仿生水声通信信号帧结构
利用时延差信息编码原理[8],通过改变不同嘀嗒声之间的相对位置来实现对仿生信号的信息调制.这种通信体制具有很多优点:调制技术成熟简单,传输稳定,功耗低,在速率要求不高的情况下,对信道随机不均匀性有较强的抗干扰能力,适合在水声信道下工作[16].
3.2 海豚嘀嗒声信息编码
时延差信息编码原理[8]是利用连续发射的多个信号,以信号之间的时延差长度代表不同的信息.采用格雷码编码方法,使十进制编码的时延差值转化为二进制后相邻只存在1 bit的不同,以此来提高通信的可靠性.将海豚叫声信号用于时延差编码体制中,在不破坏原始的海豚嘀嗒声信号声音特性前提下,达到信息传输的目的,满足本文所研究的基于仿生的通信技术的需要.

图4 海豚嘀嗒声时延差编码示意图
如图 4 所示 τdi(i=1,2,3,···,L)表示每个海豚click叫声信号相对上一个海豚click叫声信号的时延差值,即编码时间;Tpi表示每个海豚click叫声信号脉宽,Tc为最大编码时间,若每个码元携带n bit信息,则将编码时间均匀分为(2n-1)份,编码量化间隔Δτ=Tc/(2n-1),时延差τd为

k为二进制信源采用格雷码编码后的十进制信息,例如每个码元携带n=6 bit信息,则将编码时间均匀分为63份,若数字信息为“1 1 0 1 1 0”,则k=36.
由于该体制通信系统中每个叫声信号的宽度不同,编码时间也不相同,所以系统通信速率为

从(2)式可以看出,在不考虑每个海豚叫声信号宽度不一致的情况下,编码时间Tc一定时,通信速率与每个码元携带的比特信息数有关,每个码元所携带的信息量n越大,则通信速率越高,而此时编码量化间隔Δτ就越小,这就对系统的时延估计精度要求越高.由此可见,时延估计的精度越高,则编码量化层Δτ可分得越细,每个码元所携带的信息量也就越大,通信速率越高.
3.3 信道估计与均衡
3.3.1基于MP算法的稀疏信道估计
假设一个长度为L的信道,噪声是方差为σ2的加性高斯白噪声,信号经过此信道后,在接收端信号表示为

其中,n=0,1,···,N-1,s(n)为发射信号,r(n)为接收信号,h(l)为信道的冲激响应,v(n)为引入的加性高斯白噪声.将上式改写为矩阵形式为

简化为

其中,sl是训练矩阵S的列向量.由于稀疏多径信道中抽头系数大多数为零或很小,则接收信号r可以看作是训练矩阵S中的少数列向量的线性组合.这样,对接收信号r进行稀疏信号分解,就可以得到信道冲激响应.本文采用基于压缩感知理论的匹配追踪算法实现信道估计.
MP算法[12]的基本思想是在每一次的迭代过程中,从过完备原子库Φ中(字典)选择与信号最匹配的原子来构建信号的稀疏逼近,然后求出逼近后的残差.继续从过完备原子库中选择与残差最匹配的原子,并更新残差.经过多次迭代,直到满足标准为止[12].这个标准通常是残差小于某个很小的值,或者迭代次数满足一定值.
对于线性模型

其中,x∈RM为待估计的稀疏信号,y∈RN为观测向量,v∈RN为高斯噪声向量,Φ∈RN×M,且N<M,Φ可表示为

其中,φi∈ RN,i=1,2,···,M,通常称 Φ为词典或原子库,φi为词典中的原子.本文中发射信号为词典,接收信号为观测向量,信道冲激响应为待估计的稀疏信号MP算法流程为
初始化:残差r0=y,信号估计x0=0和迭代次数k=0;

其中λk是被选中的原子在字典Φ中的标号,例如第k步选出的原子时字典中的φλk原子;γ是一个很小的常量,代表给定的残差门限.
3.3.2虚拟时间反转镜信道均衡
虚拟时间反转镜(VTRM)技术通过对接收到的探测信号进行处理而估计出信道冲激响应,将接收到的信息码与估计信道的时间反转做卷积,虚拟的实现时间反转镜[13].图5给出了虚拟式时间反转镜原理框图.

图5 虚拟式时间反转镜原理框图
结合仿生通信特点,将同步信号,即海豚的哨声信号作为探测信号wr(t),基于稀疏水声信道模型,采用匹配追踪(MP)方法估计出信道冲激响应h′(t),将其时间反转h′(-t),接收到的信息信号sr(t)与h′(-t)作卷积,作为最终虚拟接收到的信号r(t),其波形近似于原信息波形s(t),VTRM处理过程表达式如下:

记:ˆh(t)=h(t)⊗h′(-t),称为虚拟时间反转信道,可视为系统最终经过的有效“信道”.当h′(t)逼近于h(t)时,二者相匹配,即“多途”信号能量叠加,产生聚焦效应,此时,ˆh(t)近似于信道的h(t)自相关函数,当声信道较复杂时其相关峰可视为“单峰”,其主峰幅度明显高于旁瓣即其他“多途”信号,可以抑制海洋信道多途扩展产生的码间干扰,并获得了聚焦增益,实现均衡的效果.
4 仿真研究与湖试验证
4.1 仿真研究
为验证仿生伪装水声通信方法以及上述信道估计与均衡算法有效性,通过Matlab软件对算法进行了蒙特卡罗仿真.采用由文献[17,18]开发的BELLHOP射线模型软件计算信道冲激响应,该模型利用高斯波束轨迹法,克服了传统射线模型中声影区强度为零和焦散线截面积为零处声强度为无穷大的缺陷,信道仿真参数如表1所示.声速剖面采用实验中实测的数据,如图6所示.图7是仿真计算出的信道冲激响应,该信道多途比较复杂,最大多途时延约为300 ms.

图6 声速剖面
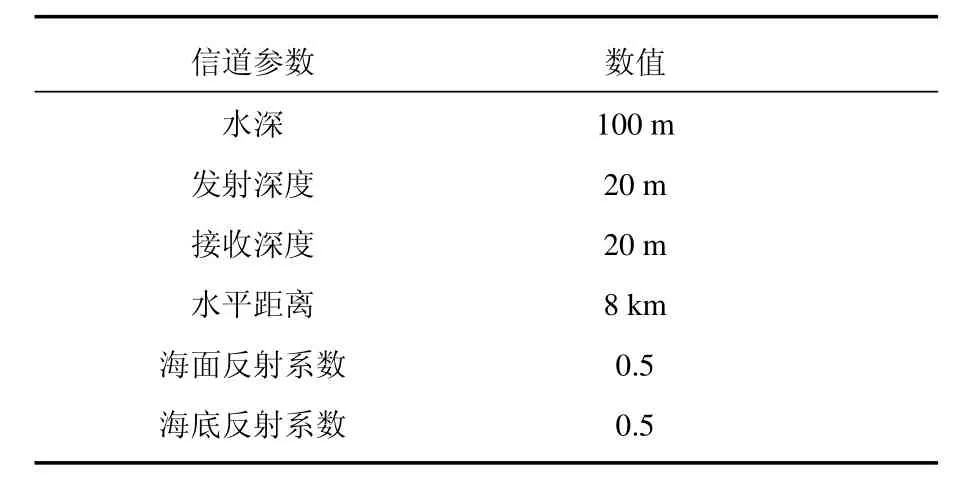
表1 信道仿真参数
仿生信号帧结构如图3所示,系统采样率48 kHz,其中海豚哨声信号时长470 ms,哨声信号与嘀嗒声信号保护间隔100 ms,采用格雷码将二进制信息向表示时延的十进制数据映射,信息调制在相邻两个嘀嗒声间隔,时间分辨率1 ms,每帧十个海豚嘀嗒声,传递信息54 bit,根据(2)式,通信速率为42.66 bps.由仿真误码率曲线图8可以看出,本文提出的仿生通信体制可以在信道多途比较复杂且信噪比很低的情况下工作,且经过信道均衡后,系统性能有明显的改善.在信噪比较低的情况下,MP信道估计方法受噪声影响,估计出的信道冲激响应误差较大,导致均衡后的误码率变高,且由于仿真的信道最大多途时延较长,而仿真的信号保护间隔小于信道的最大多途时延,因此估计的信道要比实际的信道长度短,所以均衡后仍存在一定的符号间干扰.当信噪比变高时,信道估计比较准确,均衡后的误码率迅速下降.为了更好地验证上述算法的可靠性和有效性,下面给出湖试结果.

图7 仿真信道冲激响应
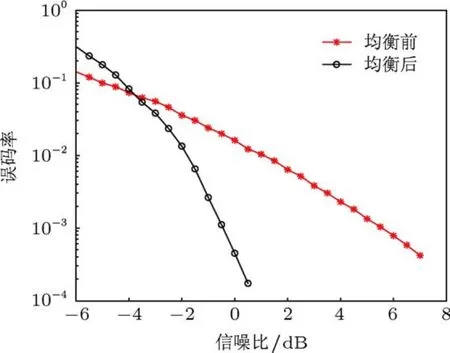
图8 仿真误码率曲线
4.2 湖试验证
为验证本文提出的基于海豚叫声的仿生水声通信方法的可行性,于2012年10月在黑龙江省海林市莲花湖进行了湖试.发射船与接收船处水域深约20 m,试验时,发射与接收换能器吊放深度均为7 m,收、发节点分别位于两艘处于自由漂泊状态的船上,风浪使节点间存在缓慢的相对运动,在约2 km的通信距离上进行了实验.
为了验证不同码元、不同通信速率时的通信效果,分别发送了包含不同码元数的数据,每帧的码元数从5到10不同,每个码元携带6 bit信息,试验中由于水面比较平静,温度较低,信道变化不大.图9为实验过程中采用LFM信号进行拷贝相关处理后得到信道的多途扩展情况,从图中可以看出,主要有5条明显的多途,最大多途时延约为30 ms.
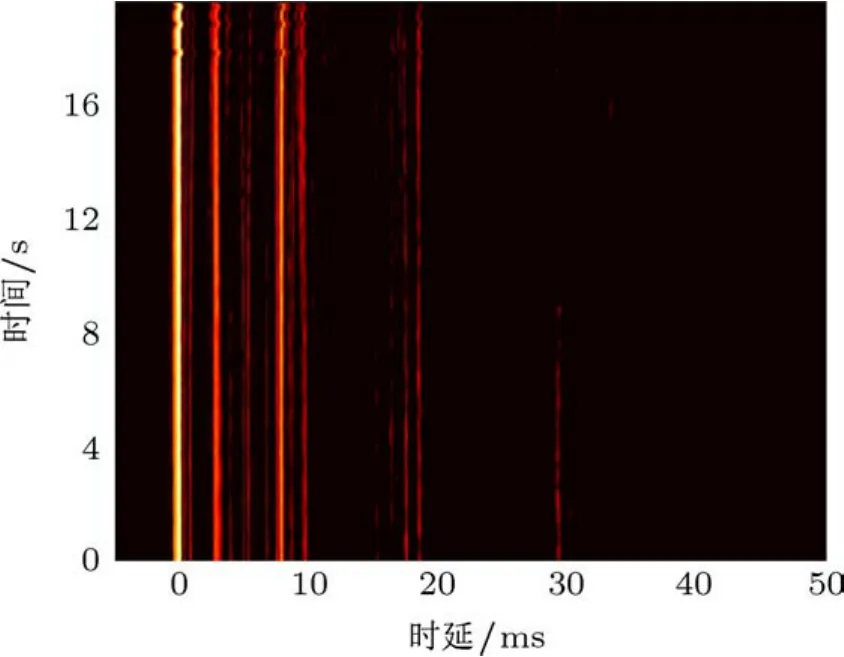
图9 LFM信号估计的时变信道冲激响应
发射信号采用图3所示的帧结构,以码元数为10时的一组仿生信号举例,由海豚嘀嗒声构成的信息序列如图10(a)所示,每个码元的自相关性以及和其他码元的互相关性如图10(b)所示,图中按最大码元相关峰值对相关后的波形进行了归一化,从图中可以看出,每个码元自相关性较好,相关峰比较尖锐.但是如图2所示,由于样本声音中含有丰富的线谱,因此其相关曲线的旁瓣较高.图10(c)是接收到的嘀嗒声信息序列.
采用MP算法对接收到的信号进行估计信道,搜索最大多途数为50,最大多途时延为35 ms,估计的信道冲激响应如图11(a)所示,从图中可以看出,有5条比较明显的到达路径,信道的最大多途时延约为30 ms,与上述用LFM信号估计的信道冲激响应比较符合.对接收信号与发射信号直接进行相关和通过VTRM均衡后的相关曲线分别如图10(d)和图10(f)所示,从图中可以看出,由于信道多途和噪声的影响,未经均衡的信号其相关性很差,个别信号已经无法找到明显的相关峰,造成解码错误;然而通过VTRM均衡后的信号,相当于经过了一个信道冲激响应近似如图11(b)所示的信道.图11(b)是估计出的信道冲激响应的自相关,一般称为时反信道,可以看出若忽略抽头系数小于归一化幅度0.2的路径,时反信道的多途时延约为2 ms,也即虚拟时反后,实现了信道的压缩和能量的聚焦,改善了信号的相关特性,如图10(f)所示,虚拟时反均衡处理后的信号相关特性较均衡前有明显的改善.

图10 发射与接收仿生通信信号时域波形和相关特性

图11 估计的信道冲激响应与时反信道冲激响应
由于湖试中信道除直达声外,在20 ms内还有与直达声强度相仿的强多途,直接采用相关法测时延产生了较大的误差,均衡前误码率较高,与仿真结果相比,湖试中均衡后的误码率较均衡前的误码率下降更迅速,进一步验证了本文采用虚拟时反均衡在复杂、强多途信道条件下的优势,也验证了虚拟时反信道均衡技术在以海洋生物叫声为载波的仿生通信系统中的有效性.在通信信号声音特性上,发射信号与接收信号具有较高的相似度,克服了传统固定载波调制时带来的声暴露问题,实现了本文仿生伪装隐蔽通信的目的.
5 结论
本文提出了一种基于海豚叫声信号的仿生伪装水声通信方法,与传统低信噪比条件下的扩频、OFDM、混沌隐蔽通信相比,本方法采用海洋中固有的海豚叫声作为信息载体,信息调制在相邻海豚嘀嗒叫声信号的时间间隔上,使探测方将仿生通信信号作为海洋生物叫声主动排除达到隐蔽通信的目的,通信时不需要考虑降低信噪比的问题,提高了隐蔽通信距离和可靠性.从仿生角度解决水下隐蔽通信的问题,为防止水下通信网工作时节点暴露、非友好节点接入或节点间交互信息时被侦听提供了很好的解决方案.最后通过外场实验验证了该仿生水声通信方法的可行性和有效性,接收信号与发射信号在声音上有较高的相似度,达到了仿生隐蔽水声通信的效果.
[1]Sozer E M,Stojanovic M,Proakis JG 2000 IEEEJ.Oceanic Eng.25 72
[2]van Walree PA,Leus G 2009 IEEEJ.Oceanic Eng.34 645
[3]van Walree PA,Sangfelt E,Leus G 2008 Oceans 2008 Quebec City,Canada,September 15—18 2008 p264
[4]Ling J,He H,Li JA,Roberts W,Stoica P 2010 J.Acoust.Soc.Am.128 2898
[5]Leus G,van Walree PA 2008 IEEEJ.Sel.Area Commun.26 1662
[6]Leus G,van Walree P,Boschma J,Fanciullacci C,Gerritsen H,Tusoni P,2008 Oceans 2008 Quebec City,Canada,September 15—18 2008 p391
[7]Clausen K T,Wahlberg M,Beedholm K,Deruiter S,Madsen PT 2010 Bioacoustics Inter.J.A.S.Rec.20 1
[8]Yin JW,Hui JY,Wang Y L,Hui J2007Acta Phys.Sin.56(in Chinese)[殷敬伟,惠俊英,王逸林,惠娟2007物理学报56 56]
[9]Stojanovic M,Catipovic JA,Proakis JG 1994 IEEE J.Oceanic Eng.19 100
[10]Donoho D L 2006 IEEETrans.Inf.Theory 52 1289
[11]Candes EJ,Romberg J,Tao T 2006 IEEETrans.Inf.Theory 52 489
[12]Cotter SF,Rao B D 2002 IEEETrans.Commun.50 374
[13]Yin JW,Wang Y L,Wang L,Hui JY 2009 Chin.Sci.Bull.54 1302
[14]Lammers M O,Au W W L,Herzing D L 2003 J.Acoust.Soc.Am.114 1629
[15]Sims PQ,Vaughn R,Hung SK,Wuersia B 2012 J.Acoust.Soc.Am.131 EL48
[16]Yin JW,Zhang X,Sheng X L,Sun C 2012 Acta Commun.6 121(in Chinese)[殷敬伟,张晓,生雪莉,孙超2012通信学报6 121]
[17]Siderius M,Porter M B 2008 J.Acoust.Soc.Am.124 137
[18]BELLHOP gaussian beam/finite element beam code Porter M http://oalib.hlsresearc-h.com/Rays/index.html[2011-11-11]
