PCB 电路板质量自动检测装置设计
2013-09-26刘鹏祥孙立环
刘鹏祥 ,孙立环
(东北大学秦皇岛分校,秦皇岛,066004)
0 引言
PCB 电路板质量自动检测装置的设计, 关键在于二维工作台各部件的选择和设计, 包括步进电机、导轨副、滚珠丝杆副和联轴器。采用步进电机的开环伺服系统驱动结构 简单、适应性强、加工精度高和工作质量稳 定,PCB 电路板自动监测装置的设计对于提 高劳动生产率和产品质量,节约经济成本有 重要意义。
1 二维工作台系统总体设计
二维工作台可以实现X和Y两个方向的运动,通过两个方向运动的合成可以实现任 意平面轨迹。本文设计的X-Y二维工作台为开环伺服系统.通过步进电机的驱动,经传 动机构带动工作台运动。工作台主要参数如下:(1)PCB电路板尺寸 300mmX300mm;(2)工作台移动速度 2mm/s-50mm/s;(3)加速度2s 达到额定速度;(4)定位精度 0.01mm。
X-Y 工作台系统总体框图如图 1 所示:
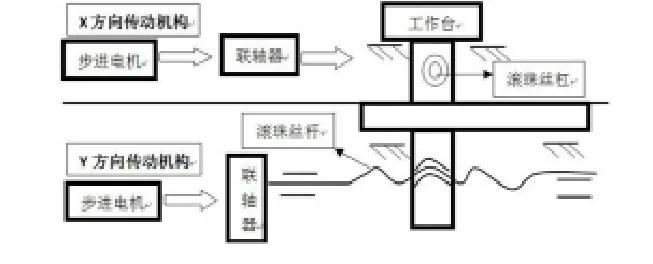
图 1 X-Y 二维工作台系统总体框图Fig.1 Overall Block Diagram of The 2D Worktable
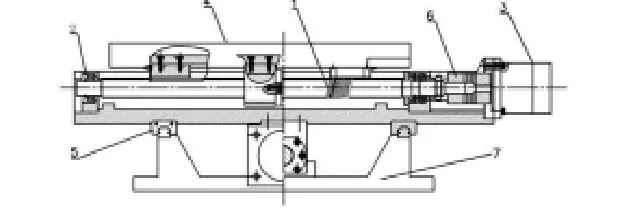
图 2 二维作台结构模型Fig.2 Model of The 2D Worktable Structure

2 二维工作台机械结构设计
首先根据PCB电路板基本尺寸,初步估 计载荷重量,选取导轨副。然后进行受力分 析,根据最大动载荷选择滚珠丝杆副。接着根据负载和转矩选择步进电机的型号。最后根据设计的 X-Y 工作台,画出如图2所示的结构图。
2.1 导轨副的选择
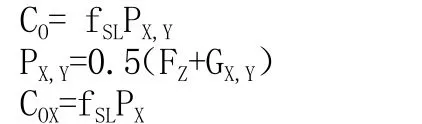
根据给定的工作载荷FZ和估算的X向和Y向重量GX和GY,计算导轨静安全系数 fSL=CO/P,式中CO为导轨的基本静额定载荷; 工作载荷P=0.5(FZ+W);fSL=1.0-3.0(一般 运行状况)根据计算工作状况取fSL=3.0。
初步选择丝杠材质为CrWMn钢,HRC为58-60,导程 Ph=5mm。滚珠丝杆轴向力:Fmax=KFX,Y+f(FZ+WX,Y)其中 K=1.15,摩擦系数f=0.003-0.005 ; FX= ( 0.1-0.6 ) FZ,FY=(0.15-0.7)FZ。 取f=0.004,FX=0.5FZ,FY=0.6FZ。寿命系数其中滚珠丝杆转速T=1500h。最大动载荷式中fH为载荷系数,HRC≥ 58 时为 1.0,fw为载荷系数,中等冲击时为 1.2-1.5,取 fw=1.2。所以,根据最大动载荷选择滚珠丝杆为济宁丝杠厂型号为 2505-2。
2.2 滚珠丝杠副的选择
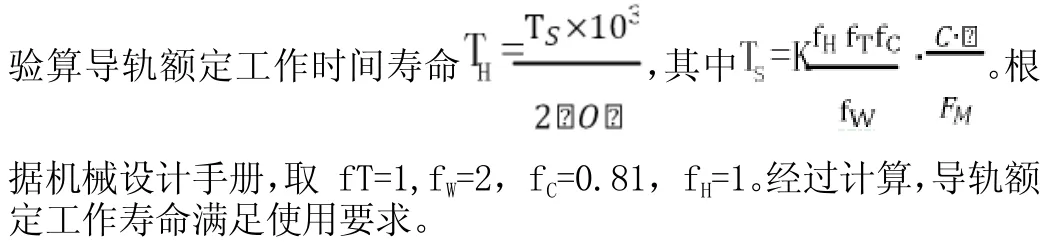
根据计算的额定静载荷初选导轨:其型号为GGC9BAK。
共发放调查问卷1 200份,回收有效问卷1 077份,有效回收率89.75%。977名医学生中,男403例,女574例,其中18岁以下者占2.97%,18~25岁者占比96.93%,2017级227例(23.23%),2016级275例(28.15%),2015级263例(26.92%),2014级212例(21.7%);参与过医患沟通课程者93例(2014级麻醉专业46例、2014级临床专业47例),未参加过者884例,及100名非医学生。
2.3 步进电机的选择
连通域指的是图像被二值化之后的若干像素的集合,假设前景像素为1,背景像素为0的前提下,连通域具有以下两个属性:一是只有前景像素的集合,二是在同一个连通域中的两个像素间总能找到一条路径由这个集合中的像素组成,也就是说像素之间两两互通。连通域算法在数字图像处理中进行目标跟踪、目标识别、多目标分割等方面都有应用,在这里进行颗粒状农产品的分选也可以采用连通域算法,先将灰度图像采用阈值分割得到二值图像,这个二值图像中包含了对图像分割后的多个连通域,然后采用连通域算法给出其属性,进而对图像中的目标进行识别、跟踪以及判断[7]。在这里采用种子填充法实现。
2.3.2 快速空载启动时步进电机转轴上的等效负载转矩 Teq1

3.3.3 最大工作负载状态下电机转轴承受的负载转矩Teq2
组分中药是指由有效组分配伍而成的现代中药,是创新中药研究的一种途径,其特点是“两个相对清楚”,即物质基础相对清楚及其作用机制相对清楚;组分中药具有满足现代药物质量可控要求,安全性、有效性证据较充分的特征,既保持了中药方剂的优势,又提高了中药制剂的质控水平[1-4]。本课题组对益元康方按照组分中药的研究思路开展基础研究,就该方组成药材之一淫羊藿中主要有效成分黄酮类成分进行提取、分离、纯化,得到淫羊藿总黄酮提取物。本研究中,本课题组采用高效液相色谱法(HPLC)建立了淫羊藿总黄酮提取物的指纹图谱,并对其中8种成分的含量进行了测定,旨在为有效控制其质量提供参考。

考虑到步进电机的驱动电源受电网电压影响较大,当输入电压降低时,其输出转矩下降,可能造成丢步,甚至堵转。因此,根据Teq来选择步进电机的最大静转矩时,需要考虑安全系数。取 K=4,则最大静转矩满足:
2.3.4 步进电机最大静转矩
综上选择步进电机型号为 90BYG550A。
深部综掘巷道超前支护机组是由一系列的超前支架组成,如图1所示。机组在工作时沿巷道掘进方向排开,掘进机在机组下方工作,机组提供一段超前支护区域,同时两帮可以在超前支护时安装锚杆。
(1)最快工作速度时,电机输出转矩校 核。工作台最快工作速度Vax=30000mm/min, 脉冲当量 =0.01mm/脉冲,由此求出电机对应的运行频率,从图 3电机运行矩频特性曲线可以看出在此频率下,电机的输出转矩 ,远远大于负载转矩 q。
式中,Jq为折算到电机轴上的惯性负载;J0为步进电机的转动惯量;J1为齿轮1的转动惯量;J2为齿轮2的转动惯量;J3为滚珠丝杆的转动惯量;M为移动部件质量。对于圆柱形零件可以按下式计算:J=0.78x103xDxL,其中D为零件直径,L为圆柱形零件长度。
2.3.5 步进电机性能校核
图 4 90BYG550A 电动机的运行矩频特性曲线 Fig.3 The Torque-Frequency Characteristic Curve of The Motor
竹韵有些犯难了,自己跟海力不过是普通主雇关系,上班拿了工资奖金,岂能再收他如此贵重的礼物?从马丽亚眼里的敌视来看,她已经隐隐感觉出了些什么。但是,不收又如何拒绝呢?何不暂时把电脑收下,今后努力工作来回报公司,或者今后用工资付帐也行,其实她也早就想给龙斌买台电脑了。想到这里,她伸手接过电脑,脸上也露出了笑容。
(2)最快空载移动是电机运行频率校核。工作台最快工作速度Vax=30000mm/min,参考机械设计手册可知,步进电机90BYG550A 的空载运行频率可达30KHz,可见没有超出上限。(3)启动频率校核。已知电机转轴上的总转动惯量电机转轴空载启动频率 f=3000Hz,所以步进电机克服惯性负载的启动频 率:。

3 误差分析
(1)滚珠丝杆副因为两端固定,中间 重力作用会弯曲,导致摩擦力增大,产生定 位误差。补偿办法:施加预紧力,消除轴向 间隙,提高滚珠丝杠刚度。
(2)导轨副表面粗糙度不同,影响定 位精度,所加载荷大小不同,也影响导轨直 线度。补偿方法:导轨采用滚珠导轨,加润 滑油,减小摩擦。
四是到2015年,种植业和水产业使用的非传统水资源的安全利用量(包括处理过的污水和咸水)在基准年2005—2007年的基础上增加25%,同时,使按照世界卫生组织和联合国粮农组织及联合国环境规划署制定的污水处理利用大纲来指导污水利用的国家数量保持同步增长,这些国家过去利用没有达标的污水开展种植业和养殖业。
(3)机械传动结构中的摩擦是伺服系统误差的主要因素之一,摩擦影响机床运动 精度并在低速运行时表现出很强的非线性, 即爬行现象。补偿方法:根据产生误差的位 置和时刻,增加额外的指令脉冲抵消爬行。

图 5 二维工作台实物模型Fig.4 The Physical Model of The 2D Worktable
4 总结
二维工作台以步进电机为驱动,通过机械机构的传动,构成开环控制伺服系统。本 设计利用二维工作台沿 X 向和 Y 向的移动, 通过电子显微镜记录 PCB 电路板的长和宽, 得出电路板的质量。系统的定位精度可达0.01mm,测量范围 300mm以内,动态响应快。结构设计简单,工作效率高,特别适用于企业自动化生产。
[1]裘祖荣.精密机械设计基础.北京:机械工业出版社,2009
[2]闻邦椿.机械设计手册.北京:机械工业出版社,2010
[3]<日>坂本正文著,王自强译.步进电机技术.北 京:科学出版社,2010.1
[4]张建民,唐水源.机电一体化系统设计[M].北京: 高等教育出版社,2005
[5]陈立德主编.机械制造装备课程设计.北京:高 等教育出版社,2012.8
[6]樊军庆主编.数控技术.北京:机械工业出版社,2012
[7]王静、朱贤华主编.机械原理课程设计.武汉: 华中科技大学出版社,2013.3
[8] 李斌,李曦主编.数控技术.武汉:华中科技大 学出版社,2010.4
[9] 贾振元,王福吉主编. 机械制造技术基础.北 京:科学出版社,2011.2
[10] 汤蕴璆编著.电机学.北京:机械工业出版社,2011.7
