鳍/舵减摇双重控制的H∞设计
2013-09-20刘彦文王广雄李栋良
刘彦文, 王广雄, 李栋良
(1.哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001;2.哈尔滨工业大学航天学院,黑龙江哈尔滨 150001)
0 引言
舰船在海上航行时,由于受到风浪等环境干扰的作用,会产生各种摇荡,这对舰船的安全性、船上的设备、货物及船员都会产生不利影响,其中以横摇影响最为严重。目前常用的减摇装置是减摇鳍,但近年来舵减摇也越来越引起了大家的广泛研究。这里航向舵本来是控制航向用的,但是利用舵偏转时船舶的侧倾运动也可用来减摇。虽然单独用舵来减摇也能达到减摇效果,但对舵机的速度要求会很高。考虑到许多大型船舶都安装有减摇鳍,所以可以仍使用原有的低速舵,与减摇鳍配合来增加减摇效果,即利用鳍和舵进行双重控制。
自从舵减摇的方案提出后就有不少文献对舵减摇系统的设计展开了研究[1-11],其中有一部分文献是关于单独用舵来减摇的方案,不过也有相当一部分文献是讨论舵与鳍配合的鳍/舵双重减摇的方案。不过文献上的双重减摇都是将鳍和舵考虑在一起,从多输入多输出(multi-input multi-output,MIMO)的角度来进行讨论的。例如文献[8]设计了舵/鳍H∞联合减摇控制器,并用结构奇异值μ分析了系统的鲁棒性能。文献[9]按文献[11]的操舵准则设计了模糊控制器来修正航向指令,再与减摇鳍进行协调控制。这种鳍/舵合在一起的设计虽然理论上是可行的,但是设计和调试较为复杂,尤其是物理概念不十分清晰。
本文提出的双重控制则是根据减摇系统的实际,将舵减摇和鳍减摇两个系统分别进行设计,在零相移上进行统一,而这个零相移的频率响应特性则是靠H∞设计来实现的。这种满足同样要求的分开设计,简化了系统的设计过程,又便于调试,也便于在设计中控制最终的减摇效果。
1 系统的模型和减摇的设计要求
这里考虑的是要将舵减摇与鳍减摇的作用相加起来,而舵对航向,即艏摇运动也有影响,所以现在的系统模型如图1所示。图中G11(s)为船体的转鳍角α到横摇角φ的动特性,G12(s)为船体的转舵角δ到横摇角的动特性,G22(s)是舵到艏摇角ψ的动特性,Kf(s)是鳍减摇控制器,Kr(s)是舵减摇控制器,Kψ(s)为航向控制器,Gα(s)和Gδ(s)为相应的鳍和舵的舵机伺服系统。

图1 鳍/舵联合减摇系统的框图Fig.1 Block diagram of an integrated fin/rudder roll stabilization system
本文的研究对象是WMEC901舰,根据文献[3-4]的模型参数,可得相应的传递函数为

至于舵机伺服系统,其带宽一般都是超出减摇系统的带宽的,即其动特性对减摇性能不会有很大影响。不过当用舵来减摇时,舵转角的速率限制却是应该要考虑的一个限制因素。为了引入速率限制,取具有限速特性的舵机模型,如图2所示[2],其限速值是6(°)/s。而未进入限速时的线性模型为

下面在线性分析中是将式(4)归入到G11(s)和G12(s)中作为一个对象特性来考虑的。本文的设计思想(反映在权函数上)是在正常减摇时基本上不进入限速段。所以系统设计时还是选用线性模型(4),而图2的结构主要用于仿真验证。

图2 带限速特性的舵机模型Gδ(s)Fig.2 Rudder servo model with rate limit,Gδ(s)
从式(3)可见,航向的G22(s)具有积分特性,这是一个慢过程,因此只要减摇系统的带宽与航向控制的带宽错开,即使这两个系统在频域上解耦,那么减摇系统就可以单独来设计了[2],现在这个减摇系统共有2个控制器和2个执行机构(α,δ),是一个双重控制的系统。这两条控制通道是并行的,故系统的开环特性为

式中,Gf=G11Gα;Gr=G12Gδ。文献[1-2]中指出,航行中海况对船舶横摇的影响可视为输出端扰动,如图1中的d(t)所示。所以减摇系统的主要性能指标是系统的输出端灵敏度S,即

由于减摇系统中的对象都呈二阶的振荡特性[见式(1)、式(2)],所以这个系统的Nyquist特性KG(jω)具有图3所示的形状。图3中还表示有式(6)分母部分的幅值|1+KG(jω)|。

图3 减摇系统的Nyquist图线KG(jω)Fig.3 Nyquist locus KG(jω)of the roll stabilization system
海浪对船舶扰动d(t)的频谱与海况和航行情况都有关,不过减摇系统设计时常以船舶的自然频率ωn作为设计工作点,因为它代表着横摇时的主导频率[2]。由此可见,要达到最大的减摇效果,应使系统的Nyquist图线上的ωn点落在正实轴上,这时1+KG(jω)的幅值为最大,即灵敏度S[见式(6)]在这个频率点上达到最小。由于在这ωn时频率特性的相移为零,故也称零相移设计,这时作用在船上的减摇力矩正好与扰动力矩相反。这种零相移的设计思想在单独用鳍来减摇的系统中是有采用的[2],但是如果是鳍和舵的双重控制,则由于系统复杂,一般则认为这样的设计思想不好实现[1]。本文的做法是分别将鳍控制器和舵控制器都按零相移进行设计,因为二者在ωn处都是零相移,就可以相加了。这里的困难是在舵减摇回路的设计上,因为舵回路的动特性比较复杂,是通过变动航向角时所引起船体侧倾来减摇的,而且在这个通道上又存在有非最小相位特性,因此不宜用一些直观的概念来进行零相移设计。本文是采用H∞方法来进行设计,因为H∞方法是一种综合方法,可以直接按零相移要求来进行设计。
2 控制器设计
2.1 减摇鳍控制器
鳍减摇系统的对象特性G11比较单纯,基本上是一个简单的二阶振荡环节,而且多年来已积累了相当的设计经验,所以这里就直接选用现有的控制率,即取鳍减摇控制器为[3]

式中:ωn为船舶横摇的自然频率,本例中 ωn=1.15 rad/s;各增益系数为k1=2,k2=6,k3=2。图4中的特性1就是在这组参数下的鳍减摇回路的Nyquist图线KfGf。从图中可以看到,ω=ωn=1.15的点基本上是在实轴上,即这个设计就是一种零相移设计。
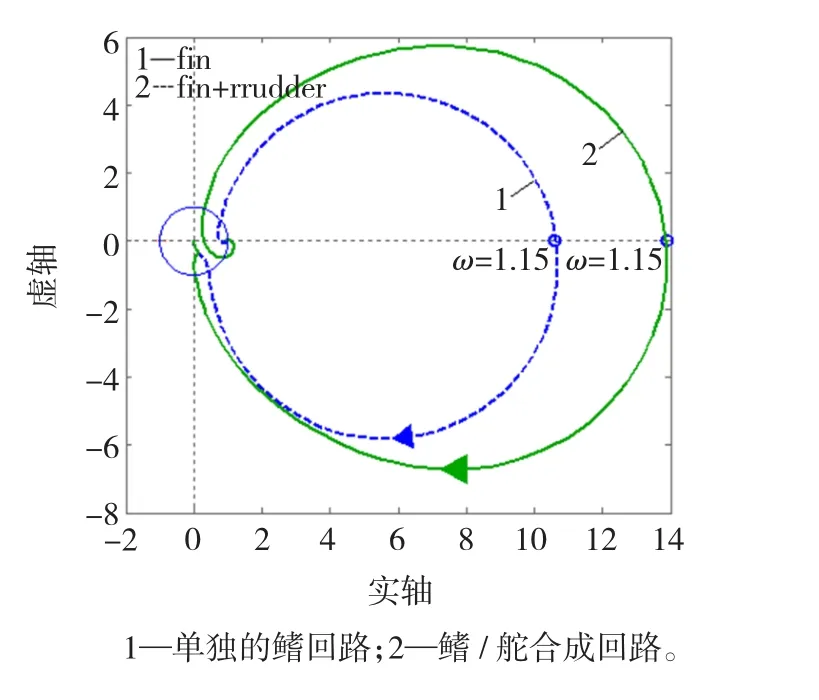
图4 系统的Nyquist图Fig.4 Nyquist locus of the system
2.2 舵减摇控制器
舵减摇系统的对象动特性G12比较复杂,故采用H∞设计。上面已经指出减摇系统的设计要求反映在灵敏度函数S(jω)上,要求灵敏度函数在零相移的频率点ωn上达到最小。舵减摇回路的灵敏度函数为

式中Gr=G12Gδ。根据对图1系统的分析可以知道,要使舵减摇系统不影响低频工作的航向系统,舵减摇控制器应具有微分特性,使低频段的横摇信号不会通过Kr(s)去影响航向系统。这样,低频段的Kr(jω)Gr(jω)→0,故根据式(8)可知,低频段S(jω)→1。而对高频段来说,由于对象特性的衰减,S(jω)也是趋近于1的。所以舵减摇系统的灵敏度Bode图具有如图5(粗线)所示的图形,其两端为0 dB,中间呈下凹状,要求在ωn处达到最小值。另外,根据Bode积分定理[12],有

对数灵敏度的积分(即面积)等于零,所以灵敏度Bode图上,既有下凹的特性,也必有凸起来的部分,图5代表的是一条典型特性。

图5 灵敏度函数和权函数Fig.5 The sensitivity function and the weighting functions

式(10)中的H∞两块问题在频域上是一种互补关系。在中频段,H∞优化设计后可以做到W1S=1,即S=1/W1,因此可以根据要求的零相移设计要求来确定性能权函数W1。在低频和高频段,因为S→1,所以有Kr=1/W2,因此可以通过W2来指定所要求的舵减摇控制器Kr(s)的特性。例如要求减摇控制器具有微分特性,就可以在W2中设一积分环节,使控制器低频段的特性具有+20 dB/dec的斜率。而W2的高频段特性是用来限制控制器Kr(s)的高频段增益的,例如图5所示的W2的高频段特性可以限制Kr(s)的高频段增益从ω=100 rad/s开始,以-20 dB/dec的斜率到ω=1 000 rad/s时衰减为1。这里要说明的是,这两块问题[式(10)]中的W2KrS是一种定性约束,主要服从于W1S的性能要求。也就是说,W2的高低频段的±20 dB/dec线段的位置在设计中是可以左右移动的,以服从W1S=1的设计需要。而W1则代表了系统的性能要求,在H∞优化设计中是要设法确保的,即确定后不要轻易更改。
根据零相移的设计要求,可以确定性能权函数W1(s)为

根据图5中的灵敏度特性,H∞优化问题可以采用如下的S/KS问题[13],即
式中,ωn是船舶的自然频率,本例中ωn=1.15 rad/s。H∞优化设计后,中频段有W1S=1的关系,即在ω1到ω2的频段上灵敏度特性和W1特性互成镜像关系,如图5所示。灵敏度函数小于0 dB的频段对应于系统的特性处于以-1为中心的单位圆之外的频率段(参见图3),这频段上系统的增益都比较大。这一频段可以认为是系统的工作频段。显然这一频率段不能太宽,不能超出式(1)~式(3)系统数学模型所适用的频带。这一频段的宽度一般以10倍频程为宜,例如在设计中可取为从 ωn/3到3ωn,如图5所示。由于这个频率带不能太宽,所以式(11)的峰值不能太高,一般以大于12 dB为宜。这里要说明的是,权函数中这些数据确定时要考虑到正常减摇时舵机的速率不可太高,例如不超出6(°)/s(见下面的仿真)。根据这些考虑,本设计中取

这个W1的峰值|W1|max=12.4 dB。至于低频段和高频段对控制器的限制,用一个有理函数W2(s)连接起来(图5),这就是式(10)中的第2个权函数,本设计中为

根据式(12)和式(13)的权函数,求解H∞优化问题[式(10)],得γ=0.996 9的H∞控制器Kr(s)为

图6所示为此H∞控制器Kr(s)的Bode图,其低频段为微分特性,高频段从ω=100 rad/s开始到ω=1 000 rad/s衰减为1,符合权函数W2所规定的性能要求。

图6 H∞控制器Kr(s)的Bode图Fig.6 Bode plot of the H∞controller Kr(s)
图7为对应的系统的Nyquist图线KrGr,从图上可以看到ω=ωn时的特性基本上处于正实轴上。所以通过H∞设计,舵减摇回路也做到了零相移设计。其实图5中的S(jω)就是这个设计所得的系统的灵敏度特性,其最低点的值为0.238=-12.5 dB。

图7 舵减摇回路的Nyquist图Fig.7 Nyquist locus of the rudder roll stabilization loop
2.3 合成的控制器
由于减摇鳍和舵减摇两个回路在ω=ωn处都做到了零相移,故可以将这两个回路的特性相加,即这两个控制器是并行工作的。图4中的特性2就是相加后的KG(s)的Nyquist图(见式(5)),ω=ωn处的幅值达到了13.9,较单独的鳍减摇(特性1)有较大的提升。
图8给出的是整个系统合成的灵敏度特性[见式(6)],其最低点的最小值Smin=0.067 2=-23.5 dB。
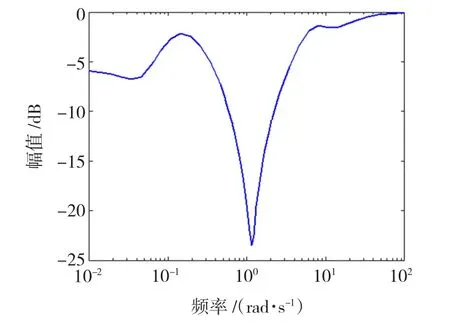
图8 合成的灵敏度函数SFig.8 The integrated sensitivity function S
3 仿真验证
现在来考察所设计的舵鳍联合减摇控制系统在海浪干扰d(t)(见图1)下的减摇情况。
横摇海浪干扰信号的仿真框图如图9所示。图9中的二阶振荡环节是船舶的单自由度横摇运动模型,ωn是船舶的自然频率,ξ为船舶的固有阻尼。

图9 横摇干扰模型Fig.9 Roll disturbance model
这里采用PM(Pierson-Moskowitz)谱来描述海浪干扰,即

式中,Hs是海浪的有义波高。模拟不规则海浪的方法常用的有成形滤波器法和线性波浪叠加法,这里采用线性叠加法[14]。这是将海浪视为一平稳的随机过程,是由无限个不同周期和相位随机的余弦波叠加得到的。为了便于进行数值模拟,取有限个(M个)这样的余弦波进行叠加来模拟海浪的波高ζ(t)为

其中:ζi为第i个谐波的波高振幅;ωi=ω1+(i-1)Δω为角频率;εi为随机的初始相位(仿真中取(0,2π)范围内均匀分布的随机数)。
本例中根据海浪的功率谱(式(15)),设海浪谱的能量主要分布在 ω1~ω2频率范围内,ω1=0.25 rad/s,ω2=2.4 rad/s。把频率范围等分成M=28个区间,其间距 Δω=(ω2-ω1)/(M-1)=0.08 rad/s,这样可以算得第i个谐波的振幅ζi为

实际仿真中(图9)用到的是海浪的波倾角,波倾角谱由波能谱[式(15)]得到[14],即

将式(18)代入式(17),就可以得到第i个谐波的波倾角振幅σi,相应地就可以得到海浪的波倾角输出σ(t)。
图10、图11给出的是5级海况,有义波高为Hs=3.25 m,遭遇角为90°时,鳍/舵双重控制下的仿真结果。
图10(a)中的曲线2就是系统输出端的海浪扰动信号d(t),曲线1就是双重控制下的减摇效果。图10(b)是舵转角的速度曲线。减摇系统的效果一般用减摇率来衡量。减摇率γ是指横摇角标准差较无减摇器时减少的百分数,即

式中,θ1和θ2分别是有减摇控制器和无减摇控制器时输出横摇角的标准差。根据图10(a)的数据,可算得。鳍/舵联合减摇的减摇率为89.32%。
事实上,系统的灵敏度S本来就是对输出端扰动的抑制特性,因此减摇率也相当于1-|S(jωn)|。本例中鳍/舵联合减摇时|S(jωn)|=0.067 2,故

与用标准差公式算得的值也大致相当,说明H∞设计中用灵敏度函数S作为性能指标来考虑是合理的。

图10 减摇前后横摇角输出及舵角速度输出Fig.10 Responses of the stabilized,unstabilized roll angle and rudder angle speed

图11 有无速度限制时横摇角输出Fig.11 Roll angle responses with and without rate limit
鳍/舵联合减摇的一个限制因素是舵转角的速度限制。从图10(b)可以看到舵角的速度基本上都工作在6(°)/s以内,说明上面权函数的确定[式(12)]满足了对6(°)/s的约束要求,图11所示就是加了舵机限速特性(图2)下的仿真结果。图中细线1是有限速时的横摇角曲线,其中峰值较低的粗线2就是图10(a)中的减摇曲线。二者的差别并不大,说明本例中关于舵减摇回路的设计(参见图5),对于一般的限速为6(°)/s的舵机来说,可以起到用舵来增强减摇效果的作用。
这里要说明的是,船舶减摇方面的仿真内容是很丰富的。这里的仿真只是要说明,当分别采用零相移设计时系统的特性就可以按相加的思路来考虑,仿真验证了这一设计思想。
4 结语
双重控制系统中控制通道之间是一种相加的关系。本文提出的零相移设计使两个通道在主导频率上具有相同的零相位,因而这两个通道的特性可以相加,增强了减摇的效果,也方便了这联合减摇系统的设计。为了保证在主导频率上的零相移要求,H∞控制是一种较好的设计选择,因为这是一种可指定性能的设计方法。文中从频域上互补的角度讨论了H∞控制S/KS问题中权函数的选择,这样的讨论对其他H∞问题中的权函数的选择也都是可以借鉴的。
[1]ROBERTS G N,SHARIF M T,SUTTON R,et al.Robust control methodology applied to the design of a combined steering/stabilizer system for warships[J].IEE Proceedings of Control Theory Applications,1997,144(2):128-136.
[2]ROBERTS G,BRAHAM S.The control of warship rolling motion using the rudder and the stabilizing fins[J].Computer and Control Engineering Journal,1991,2(2):49-56.
[3]SGOBBO J,PARSONS M.Rudder/fin roll stabilization of the USCG WMEC 901 class vessel[J].Marine Technology,1999,36(3):157-170.
[4]BLANKE M,CHRISTENSEN A.Rudder-roll damping autopilot robustness to sway-yaw-roll couplings[C]//Proceedings of 10th Ship Control Systems Symposium,October 25-29,1993,Ottawa,Canada.1993:93-119.
[5]GOODWIN G C,GRAEBE S F,SALGADO M E.Control System Design[M].Beijing:Tsinghua University Press,2002:758-762.
[6]刘彦文,刘胜,王毅.船舶舵减摇的H∞控制设计[J].电机
与控制学报,2009,13(1):133-137.
LIU Yanwen,LIU Sheng,WANG Yi.H∞Design for rudder roll stabilization of ships[J].Electric Machines and Control,2009,13(1):133-137.
[7]刘胜,于萍,方亮,等.船舶舵减横摇H∞鲁棒控制系统[J].
中国造船,2007,48(3):35-43.
LIU Sheng,YU Ping,FANG Liang,et al.H∞robust control system of ship rudder roll damping[J].Shipbuilding of China,2007,48(3):35-43.
[8]刘胜,方亮,于萍.船舶舵/鳍联合减摇鲁棒控制研究[J].
哈尔滨工程大学学报,2007,28(10):1109-1115.
LIU Sheng,FANG Liang,YU Ping.More effective damping of roll through joint use of rudders and fin[J].Journal of Harbin Engineering University,2007,28(10):1109-1115.
[9]金鸿章,王帆.低舵速下具有能量优化的舵鳍联合减摇研究[J].兵工学报,2009,30(7):945-950.
JIN Hongzhang,WANG Fan.Rudder/fin roll stabilization with energy optimizatio using a lower-speed steering gear[J].Acta Armamentarii,2009,30(7):945-950.
[10]张显库,杨盐生,郭晨.舵鳍联合减摇的鲁棒控制系统[J].交通运输工程学报,2006,6(4):71-74.
ZHANG Xianku,YANG Yansheng,GUO Chen.Integrated robust control system of rudder and fin[J].Journal of Traffic and Transportation Engineering,2006,6(4):71-74.
[11]CEANGA N V.Fuzzy rudder-roll damping system based on analysis of autopilot command[C]∬Proceeding of CAMS’2004,July 7-9,2004,Ancona,Italy.2004:285-290.
[12]王广雄,何朕.控制系统设计[M].北京:清华大学出版社,2008:80-83.
[13]王广雄,何朕.应用H∞控制[M].哈尔滨:哈尔滨工业大学出版社,2010:101-116.
[14]金鸿章姚绪梁.船舶控制原理[M].哈尔滨:哈尔滨工程大学出版社,2001:31-51.