机器人高速运动免疫控制方法研究
2013-09-17丁度坤
丁度坤
(东莞职业技术学院机电工程系,广东东莞523808)
近年来,随着劳动力成本的持续上涨,机器人作为一种新兴的自动化设备,在社会各领域均得到了广泛的应用。机器人在工业中的应用主要用于焊接、搬运、喷涂、装配等,同时在采矿、农业、物流、军事等领域也得到了应用[1-3]。提高机器人的运动速度,可提高其生产效率。但与此同时,也会使机器人的机械系统、控制系统处于一种极不稳定的极端状态,这种状态会影响其运动精度。如何使高速运动条件下的机器人保持一种稳定、高精度的状态,成为自动控制领域的一道难题。为此,各国机器人领域的专家、学者进行了不懈的努力,分别从机器人的机构、动力学、控制算法等方面入手,取得了不少阶段性的成果[4-7]。目前已有的各种方法,往往较为复杂,难以满足机器人实时性控制要求。
作者提出了一种改进的免疫PID控制,以传统的PID控制为主控制器,采用免疫算法可根据机器人的控制情况不断改进PID系数 (即比例系数kp、积分系数ki、微分系数 kd),以达到一种最佳的控制效果。
1 自研发机器人样机平台
自主研制的垂直关节型的6自由度机器人样机可用于搬运、焊接、喷涂等领域,其实物如图1所示。机器人的控制系统采用了二级控制模式,工控机作为第一级控制器,负责系统的运行调度、机器人各关节的插补运算以及对机器人的实时控制。PMAC运动控制卡作为第二级的控制器可根据上位机发送的控制指令,完成对机器人各关节的运动控制。两级控制器通过PCI总线通讯,示教盒与工控机通过RS232 总线通讯[8]。
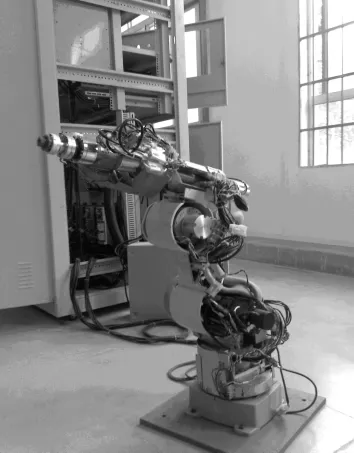
图1 机器人样机实物
2 免疫PID控制算法
2.1 免疫PID控制原理
传统的PID控制因其简单、有效,至今仍在自动控制领域得到了广泛的应用,其控制表达式表述如下:

式中:u为PID控制器的输出量;
kp为PID比例增益系数;
ki为PID积分增益系数;
kd为PID微分增益系数;
e为输出误差。
在机器人的关节传递函数时变的情况下,如何使得PID控制器的3个参数 (即比例系数kp,积分系数ki,和微分系数kd)始终保持最优,成为决定最终控制器性能的关键所在。
为此,提出了一种免疫PID控制的新方法,以PID为主控制器,利用免疫克隆算法构建调节器,根据被控对象对PID参数进行实时调整,控制原理如图2所示。

图2 免疫PID控制原理
2.2 免疫克隆算法研究
(1)编码与解码原则
采用二进制码对PID参数进行编码,每个个体包含30个二进制码。解码时,把30个二进制码断开成3部分,每一部分包含10个二进制码,分别对应PID控制器的比例、积分与微分增益系统。首先把每一部分的二进制码转换成对应的十进制码,假设y1为前10个二进制码的转换结果,y2为中间10个二进制码的转换结果,y3为最后10个二进制码的转换结果,然后按照式 (2)可将随机产生的30个二进制码转化成对应 PID 增益系数[9-10]:

式中:x1为PID的比例增益系数;
x2为PID的积分增益系数;
x3为PID的微分增益系数;
yi为二进制转十进制换算结果;
αmin、αmax为PID增益寻优范围。
(2)抗原与抗体定义
定义PID控制器3个增益系数 (kp、ki、kd),以其经过二进制编码之后的字符串为抗体。将控制器的误差e(t)、系统的上升时间ta、控制器的输入量u(t)定义为抗原。
(3)亲合度函数
为使系统具有较快的响应时间、较小的稳态误差与控制能量,选取误差e(t)对时间的积分、系统的上升时间ta、控制器的输入量u(t)为亲合度函数参数,亲合度函数表达式具体为:

式中:e(t)为采样时刻t系统输出误差;
u(t)为采样时刻t系统输入量;
ta为PID控制器的上升时间;
b1,b2,b3为权系数。
对权系数数值的选取,取决于用户对系统运行性能的需求,如要求机器人系统具有较高的运动速度,可适当增加b3的权重,如要求机器人系统具有较高的精度,则可适当提高b1权重。
(4)选择策略
根据抗体的相对亲合度进行选择,抗体的相对亲合度计算公式如下:

式中:pi为抗体相对亲合度;
di为不同的抗体;
f(di)为抗体与抗原的亲合度。
由式 (4)不难看出,抗体的相对亲合度越大,该抗体被选中的机会也就越大。
(5)改进型的免疫克隆算法流程分析
克隆选择算法是人工免疫系统中基于群体的免疫算法,是根据克隆选择理论和亲合度成熟过程提出的一种智能算法。在传统免疫克隆算法基础上,进行了三方面的改进:
①引入了注射免疫疫苗的操作
设个体x,对个体x进行疫苗注射操作,是按照某些先验的知识经验来修改x的某些基因位上的基因或分量,将人类对于问题的认识经验引入,从而使所得个体以较大的概率具有较高的适应度,加快收敛速度。设有群体c=(x1,x2,…,xn),对c接种疫苗是指在c中随机抽取某个个体而进行的操作。疫苗来源于对问题的先验知识,它所包含的信息量与准确性对算法的性能起重要作用。对个体进行注射疫苗操作,是力求用局部的特征信息以一定的强度干预全局并行的搜索进程,抑制或避免求解过程中的一些重复和无效的工作,以克服原策略中交叉和变异算子操作的盲目性。
②对传统免疫选择策略进行了改进
不对全部的个体都进行选择复制,选取其中最好的若干代个体,按照其亲合度的大小,计算其相对亲合度,组建新总群,进行下一次的迭代计算,以提高收敛的速度,总群个体之间的多样性通过免疫算法的高频变异来保证。
③引入了免疫记忆机制
在每代迭代完毕时,都进行一次判断,判断当代的最佳抗体,其与抗原的亲合度是否高于上一代的最佳值。如是,则取其组成记忆抗体群参加下一轮的迭代;反之,则保留上一代的最优记忆抗体群不变。
免疫克隆选择算法的具体流程描述如下[10-11]:
a.产生候选集P,P由记忆细胞子集M和保持数量集Pr组成,即P=M+Pr;
b.从群体P中基于亲合度的大小选择n个最好的个体,组成最优个体集Pn;
c.对最优个体集Pn进行克隆操作,以产生一个临时的群体C,个体克隆的规模取决于该个体对抗原的亲合度;
d.对群体C进行高频变异,以产生成熟的抗体群体C*,高频变异的概率与抗体的亲合度成反比;
e.判别是否对群体C*进行注射疫苗操作,如果是,则进行疫苗的注射;否则转入下一步的操作;
f.对C*中的最优个体进行免疫记忆,组成记忆集M,P中的一些元素将被M中的元素代替。
3 实验与分析
为验证所提算法的有效性,控制实验机器人沿某一轨迹高速运动,运动速度为1.86 m/s,光电编码器采样时间为10 ms,利用免疫控制算法实现机器人在工作轨迹未知的条件下的高速运动控制。
改进后的免疫克隆算法与传统的遗传算法的迭代过程如图3所示。由图中结果可见,改进后的免疫算法经过大约7代的迭代运算,确定最小亲和度函数值3.004。遗传算法需经过大约35代的迭代运算,其适应度函数值8.68,改进后的免疫克隆算法具有更好的寻优性能。其对应的PID控制器实验结果如图4所示。

图3 算法迭代过程对比

图4 免疫克隆PID与GA-PID仿真结果
由此可见,与传统的遗传算法相比,改进后的免疫克隆算法迭代过程减少,用其整定的PID控制器,上升时间约为30 ms,且基本上无超调。在动态特性方面较传统的GA-PID算法有明显提高,最终的轨迹跟踪结果如图5所示,跟踪精度为±0.08 mm。
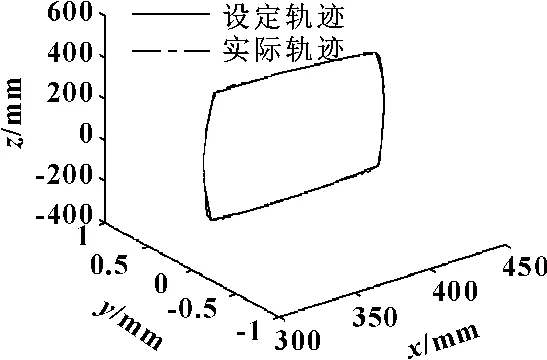
图5 机器人轨迹跟踪结果
4 结论
(1)搭建了6自由度的机器人硬件平台,对机器人硬件平台结构进行了介绍。(2)借鉴生物免疫机制,设计了改进的免疫克隆算法,构建免疫-PID控制器。(3)进行了验证实验,实验结果表明,所提出的控制策略,与传统的算法相比,具有辨识精度高,迭代次数少,动态特性好,能满足高速条件下的机器人运动控制要求。
【1】NEARCHOU A C,ASPRAGATHOS N A,SOFOTASSIOS D P.Reducing the Complexity of Robot’s Scene for Faster Collision Detection[J].Journal of Intelligent and Robotic Systems,1999,26(1):79 -89.
【2】NONAMI K.,YUASA R.,WATERMAN D,et al.Preliminary Design and Feasibility Study of a 6-Degree of Freedom Robot for Excavation of Unexploded Landmine[J].Autonomous Robots,2005,18(3):293 -301.
【3】宋健,张铁中,徐丽明,等.果蔬采摘机器人研究进展与展望[J].农业机械学报,2006,37(5):158 -162.
【4】韩亚锋,马履中,吴伟光,等.Delta并联机器人弹性动力学研究[J].农业机械学报,2011,42(10):197 -202.
【5】HAKLIDIR Mehmet,TASDELEN Isa.Modeling,Simulation and Fuzzy Control of an Anthropomorphic Robot Arm by U-sing Dymola [J].Journal of Intelligent Manufacturing,2009,20(2):177 -186.
【6】WANG Jianzhong,JI Jiangtao,WANG Hongru.Grey Prediction Fuzzy Control of the Target Tracking System in a Robot Weapon[J].Journal of Beijing Institute of Technology,2007,16(4):424 -429.
【7】VICENTE Parra-Vega,SUGURU Arimoto,LIU Yunhui.Dynamic Sliding PID Control for Tracking of Robot Manipulators:Theory and Experiments[J].IEEE Transactions on Robotics and Automation,2003,19(6):967 -976.
【8】CRAIG John J.机器人学导论[M].3 版.贠超,等,译.北京:机械工业出版社,2006:14-159.
【9】肖人彬,曹鹏彬,刘勇.工程免疫计算[M].北京:科学出版社,2007:3-105.
【10】焦李成,杜海峰,刘芳,等.免疫优化计算、学习与识别[M].北京:科学出版社,2006:16-90.
