多指抓取力的线性组合计算
2013-09-16陈栋金王新庆
陈栋金,姜 力,王新庆
(哈尔滨工业大学 机器人技术与系统国家重点实验室,150080 哈尔滨)
机器人多指手抓取过程中,不仅要求多指手对物体施加的力能够平衡作用在物体上的外力,而且要求各手指与被抓物体的接触点满足摩擦锥约束.求取满足这些约束的最小抓取力就是力优化问题,而实际应用则要求力优化能够实时进行.
国内外学者提出了不同的力优化方法.Cheng等[1]用多面锥来近似摩擦锥进行线性规划,但结果偏保守;Yoshikawa 等[2]和熊蔡华等[3]则尝试用智能规划的方法,但效果不够理想。相较于线性规划和智能规划,非线性规划的计算结果最优,因此更为主流.Buss[4]的理论为这一领域带来了突破,他提出用矩阵的半正定性来替代摩擦锥约束,将力优化问题转换为黎曼流型上线性约束下的凸优化问题,进而用梯度流方法来解决.在Buss 理论的基础上,文献[5-7]对非线性优化方法进行了进一步的探索.非线性优化算法多数都需要一个同时满足外力平衡和摩擦锥约束的抓取力初值.Li Han 等[8]求取构造对称阵的最小特征值,计算量较大;Boyd 构造了一个较为简单的单值优化问题来求取初值,但同样计算复杂;王滨等[9]利用拉格朗日乘子法求取初值力,但一般需要数次到数十次不等的迭代计算.初值计算不仅耗时,而且影响收敛速度.
本文在Buss 的梯度流算法基础上,研究优化算法中所需初始力值的计算方法,利用抓取力集为凸锥的性质,提出线性组合求取抓取力初值的方法,根据凸分析理论证明了线性组合方法的正确性.最后通过算例仿真,验证了线性组合法得到的抓取力初值满足约束,计算速度比拉格朗日法、单值优化法更快,且使力优化算法更快地收敛.
1 抓取力的线性组合
根据多指手与物体接触点处摩擦的情况,可将接触分为无摩擦点接触、带摩擦点接触及软指接触,本文采用带摩擦点接触模型.机器人多指手抓取物体时,手指数为M(M=3,4,5),抓取矩阵为G ∈R6X3M,物体上作用有外力Wext∈R6,需要确定各手指的接触力fi∈R3,i=1,…,M,使物体保持平衡,同时满足摩擦锥约束

即抓取力应满足
利用Buss 的梯度流优化算法,可以求取满足上述约束条件的抓取力集中的最优值,但首先需要一个满足上述约束的抓取力作为整个优化算法的初始条件,本节将给出利用线性组合计算力初始值的过程.
当作用外力为单位力(旋)[-1,0,0,0,0,0]T时,利用王滨[9]求取初值后优化的方法,可以很容易地求取这一外力下的优化抓取力,记为fB1.同样的,可以求得当外力(旋)分别为矩阵

中各列时对应的抓取力值,分别记为fBi,i=2,…,12.可以写为
对任意形如Wext=[w1w2w3w4w5w6]T的外力(旋),可将其分解为

其中:E ∈R12;Ei≥0;Ei+6≥0;Ei·Ei+6=0,i=1,…,6.即任意外力(旋)都可以表示成单位外力(旋)的线性组合.这里规定,组合中单位外力(旋)的系数均为非负实数,且正负相对的两单位外力(旋)的系数中必有一个取零.令

联合式(1)可得

因此,可以得到任意外力(旋)Wext时计算抓取力初值的简单方法,任意外力对应的抓取力可表示成其线性组合中单位外力所对应的抓取力的线性组合,即

应用时,首先,离线计算各单位外力下的优化抓取力作为线性组合的基;然后,在线只需根据外力(旋)Wext与单位外力的关系对各基础抓取力fBi进行线性组合,所得结果自动满足外力平衡约束.
2 线性组合力的摩擦锥约束特性
利用线性组合方法得到的接触力能够满足外力平衡约束,但是需要思考的是,几个满足摩擦锥约束的力相加,其和是否仍满足摩擦锥约束.下面将基于凸分析理论,证明若各组成元素满足摩擦锥约束,则它们线性组合后得到的接触力同样满足摩擦锥约束.

2.1 理论依据
凸集[11]的定义:一个集合C,取集合中任意两点之间的线段,如果线段中任意一点同样在集合中,则集合C 为凸集,即一个集合若满足:
则其为凸集.
凸包的定义:凸包是凸集C 中元素的凸组合集,记为Conv C,即

凸包的性质:凸包Conv C 也是一个凸集.凸包Conv C 是包含凸集C 的最小的凸集,即

集合的性质:包含一个集合的最小集合是它本身.
2.2 抓取力集合的摩擦锥约束特性
根据凸包的性质以及集合的性质,可得出

则凸包Conv C 中的元素也属于凸集C,即
根据以上描述的凸集性质,对于各个手指接触力凸锥Ci,可以得出
在摩擦凸锥Ci内,取任意元素fi∈Ci,再取任意大小的正实数t,对于t·fi有

可以看出,凸锥Ci内任意元素fi与任意正实数t的乘积t·fi仍然属于凸锥Ci.
结合性质(2)和(3),得出推论:在各手指接触力的凸锥内,有


3 线性组合算法分析
使用线性组合法得到的抓取力不仅满足外力平衡,而且满足摩擦锥约束,因此可以作为Buss的梯度流法算法所需的抓取力初值.事实上,这一方法适用于所有需要初值的力优化算法.线性组合法求取抓取力初值的具体步骤为:
1)离线计算单位外力(旋)作用下的抓取力基础向量;
2)计算任意外力对应单位外力的线性组合的非负系数;
3)按相同系数对抓取力基础向量进行线性组合;
4)将组合得到的值作为运行力优化算法的初值.
将线性组合法与主流的拉格朗日乘子法、单值优化法进行比较,从算法复杂度来看,线性组合只需18·M 次乘法,15·M 次加法;用拉格朗日乘子法直接计算则通常需要N 次迭代,每次迭代耗费9·M2次乘法,9·M2次加法;单指优化法耗费更多.线性组合法较拉格朗日法计算量少,且M越大,差距越大;使用拉格朗日乘子法还需进行在线摩擦锥约束校验,线性组合法则由于各基本组成元素均满足摩擦锥约束,其组合自动满足,不需要再进行校验.因此,线性组合法的计算速度最快.
4 算例仿真与分析
如图1 所示的均匀材质长方形,用四指手抓取.其几何参数为a=0.10,b=0.15,c=0.15,d=0.10,H=0.20.建立物体坐标系OXYZ,四指与物体接触点处的坐标系分别为Oifnifoifti,且i=1,2,3,4,采用带摩擦点接触模型,摩擦系数为0.4.

图1 四指抓取模型
算例的抓取矩阵为:

按照前节所述的线性组合方法,首先离线计算各单位外力(旋)作用下的抓取力并优化作为线性组合的基,得

施加外力Wext=[1 0.5-2-0.1 0.2 0]T,
用拉格朗日乘子法计算求得的初值力为

耗时0.503 s;用单值优化法求得的初值力为

耗时0.573 s;而用正线性组合法求得的初值力为

耗时0.471s.
验证这3 种方法求得的初始力值,结果证明它们均同时满足外力平衡及摩擦锥约束.将这3组初始力值分别应用于Buss 的梯度流优化法算法,得到手指接触法向力和目标函数的收敛曲线,分别见图2~4.图中Fn为手指法向力,φ 为目标函数,n 为迭代次数.

图2 拉格朗日法求初值后优化结果
对比图2~4 中曲线可看出,单值优化所得初值用于力优化收敛速度最慢,迭代约200 步后达到收敛值;拉格朗日法对应的收敛速度较快,迭代约110 步后达到收敛值;线性组合法对应的收敛速度是最快的,迭代约100 步后即达到收敛值.不同方法得到的收敛值相同,其中手指接触力的收敛值为

而目标函数值则收敛至7.3.

图3 单值优化法求初值后优化
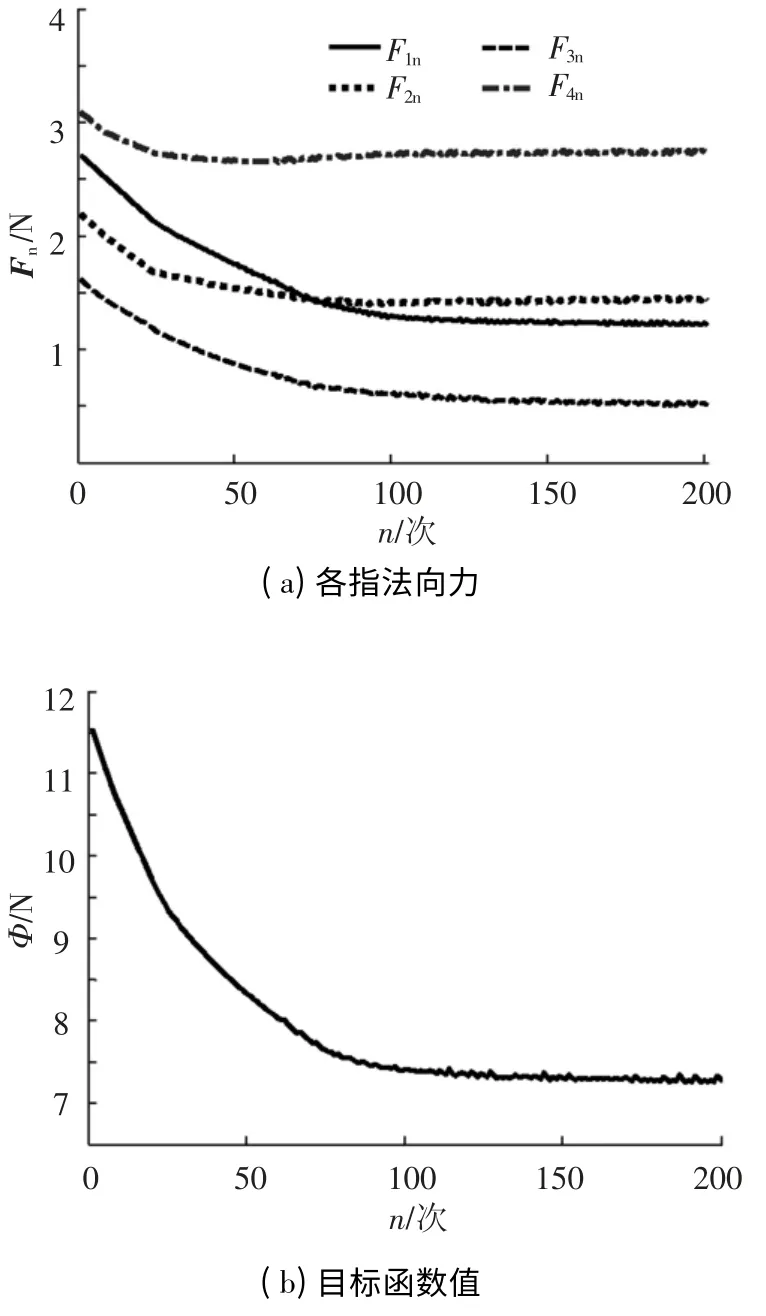
图4 线性组合法求初值后优化结果
5 结论
1)以一组单位外力所求得的抓取力为基,任何外力可以写成这组单位外力的线性组合形式,根据同样的组合规律对抓取力基进行线性组合,得到的抓取力能够满足力平衡和摩擦锥约束,将其作为力优化算法中所需的抓取力初值.
2)在同一算例中,对比不同的抓取力初值算法结果表明:线性组合方法得出满足约束的抓取力的速度较其他方法更快,且得出的解最优,能够保证力优化算法更快地收敛.
[1]CHENG F T,ORIN D E.Efficient algorithm for optimal force distribution-the compact-dual LP method[J].IEEE Transactions on Robotics and Automation,1990,6(2):178-187.
[2]YOSHIKAWA T,NAGAI K.Evaluation and determination of grasping forces for multi-fingered hands [C]//Proceedings of the IEEE International Conference on Robotics and Automation.Philadelphia,PA,USA:IEEE,1988:245-251.
[3]熊蔡华,熊有伦,张征,等.基于人工神经网络的抓取规划[J].中国机械工程,1997,8(2):11-17.
[4]BUSS M,HASHIMOTO H,MOORE J B.Dexterous hand grasping optimization[J].IEEE Transactions on Robotics and Automation,1996,12(3):406-418.
[5]BUSS M,FAYBUSOVICH,MOORE J B.Dikin-type algorithms for dextrous grasping force optimization[J].The International Journal of Robotics Research,1998,17(8):831-839.
[6]LIU Yunhui.Qualitative test and force optimization of 3-D frictional form-closure grasps using linear programming[J].IEEE Transactions on Robotics and Automation,1999,15(1):163-173.
[7]HAN Li,TRINKLE J C,LI Zexiang.Grasp analysis as linear matrix inequality problems[J].IEEE Transactions on Robotics and Automation,2000,16(6):663-673.
[8]BOYD S P,WEGBREIT B.Fast computation of optimal contact forces[J].IEEE Transactions on Robotics,2007,23(6):1117-1132.
[9]王滨,李家炜,刘宏.机器人多指手的优化抓取力计算[J].吉林大学学报,2008,38(1):178-182.
[10]LI Zexiang,SASTRY S.Task oriented optimal grasping by multifingered robot hands[J].IEEE Journal of Robotics and Automation,1988,4(1):32-44.
[11]BOYD S,VANDENBERGHE L.Convex optimization[M].United Kingdom:Cambridge University Press,2004:21-60.
