PZT驱动快速控制反射镜的设计与试验*
2013-09-15张丽敏
张丽敏,王 帅,杨 飞,乔 兵
(中国科学院长春光学精密机械与物理研究所,吉林长春130033)
0 引 言
由于具有响应速度快和控制精度高等特点,快速控制反射镜(FSM)已经成为光学系统中稳定和校正光束的关键部分,在工业设备、激光通讯、成像系统等多个领域得到了广泛应用[1-5]。随着大口径望远镜技术的发展,FSM不仅应用于精密跟踪系统,而且应用于自适应光学系统以校正大气扰动引起的低频误差。控制带宽越高,对干扰的抑制能力越强,系统反应速度越快,从而可以提高系统的跟踪精度。因此,根据系统需求设计出精度高、响应频率快、稳定性好的FSM系统十分必要。
目前,国外FSM技术比较成熟,已经形成商业化产品,如德国的PI公司、美国的BALL Aerospace&Technologies公司,但是购买和维护费用较高,产品尺寸受限。国内一些高校和研究机构也已经开展FSM研究,如成都光电所在1.2 m望远镜自适应光路中已经使用自己研制的FSM机构。笔者所在单位目前使用的FSM为框架式结构,其缺点是摩擦力矩和惯量大,从而导致结构谐振频率较低,控制系统存在严重非线性,很难实现精密跟踪。
在FSM结构中,结构形式和驱动器直接决定了系统的谐振频率和负载能力,本研究根据课题需求设计一种基于柔性铰链单元支撑、压电陶瓷(PZT)驱动的FSM,并在完成装配后进行实验测试。
1 FSM结构设计分析
FSM系统一般由6部分组成:基座、驱动器、柔性支撑结构、位移传感器、反射镜以及驱动和控制电子学系统。基座要求刚度高、稳定性好,以避免驱动器的反作用力对系统造成影响。驱动器控制反射镜运动,需要具有高刚度、大行程、强负载能力等特点。常用驱动器有音圈电机和PZT。PZT具有定位精度高、驱动力大、响应速度快等优点,是目前微位移技术中比较理想的驱动元件。柔性支撑结构是FSM的关键元件,利用材料的弯曲变形来代替刚性铰链中两个接触面之间的滑动和转动,与刚性铰链比较不需要润滑,运动平稳,而且没有摩擦[6]。设置位移传感器可以构成局部闭环,通常使用的有LVDT和应变片(SGS)。
评价FSM性能的主要指标有谐振频率、分辨力、通光口径和行程等。
1.1 结构谐振频率
根据常规设计,系统的机械结构谐振频率至少应2倍于控制系统带宽。但是FSM系统的工作带宽为数百赫兹甚至上千赫兹,对应机械结构的一阶谐振频率要求更高,从而对系统刚度、驱动器及其控制系统的要求非常大。为了满足工作带宽与结构谐振频率关系,设计时可以采用一种假设准则[7]:
(1)FSM系统在工作方向上的谐振频率可以低于系统的工作带宽,且越低越好,即:

(2)FSM系统在非工作方向上的谐振频率应远高于系统的工作带宽,且越高越好,即:

式中:f1—系统工作方向一阶谐振频率,f2—非工作方向一阶谐振频率,fc—系统控制带宽。
1.2 分辨力
驱动器的精度、间距和布局方式均会影响系统的分辨力。FSM偏转角为:

式中:Δ—驱动器的输出位移,L—驱动器中心到回转中心的距离。
所以在给定结构中驱动器的最小输出位移决定系统的分辨力,而其与驱动器的类型和控制系统有关。
1.3 通光口径
反射镜自身对系统谐振的影响为:

式中:f0—空载时结构的谐振频率,I0—运动平台的转动惯量,IM—反射镜的转动惯量。
通光口径越大,为了满足反射镜的面型要求其厚度也相应增加,从而降低了系统的谐振频率。
此外,还需要考虑惯性力这一关键参数[8]。当反射镜以高频振动时,产生很大的角加速度,从而对驱动器产生较大的惯性力:

式中:J—运动部分的转动惯量,f'—反射镜运动频率,θ—反射镜的转角,L—驱动器力臂。
当确定FSM的各种参数后应计算这一作用力,以保证驱动器有足够的强度。
2 机械系统设计
该设计采用4驱动器双驱动轴结构,属于超自由度结构,因此需要较高的加工和装配精度。所要求的FSM系统性能指标如表1所示。
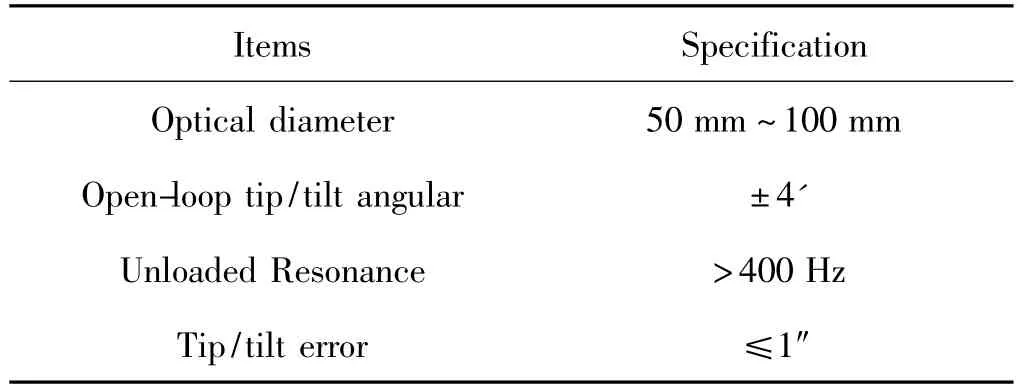
表1 FSM设计指标
2.1 柔性支撑结构模态分析
柔性支承结构在FSM系统中起到支承反射镜和为反射镜分配各个方向自由度的作用。其允许反射镜绕控制轴自由旋转,同时约束反射镜在非工作方向的自由度。本研究采用柔性薄板为基本单元拓扑的柔性支承结构,如图1所示。薄板实现自身的柔性可以通过改变其材料或几何尺寸来实现,对于给定材料,改变其厚度和长度是改变柔性的有效方法。在实际结构中,单个薄板很难满足要求,通常是通过薄板的串联和并联组合来实现。FSM为两轴对称结构,且两轴相互独立,单轴支撑点关于中心线对称分布,所以至少需要4组独立弹性支撑,即将柔性薄板拓展为4组并联薄板组合。
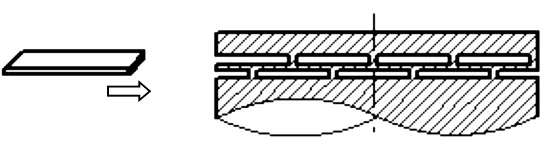
图1 柔性支撑结构
由于基频振动在系统的自由响应和强迫响应中往往起主导作用,当系统工作时,基频是最先发生共振的频率。因此,估算系统的基频具有重要的实际意义。常用的基频估算方法有Rayleigh能量法、静挠度法和Dunkerley法等。这里采用Rayleigh能量法来估算系统的基频。以瑞利商估计系统基频的可靠性与准确性,取决于试算函数的合理选取。以往大量的实例证明,采用符合自然边界条件的静变形曲线作为试函数,往往比采用其他函数形式得到的精度更高[9-10]。
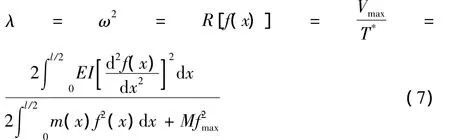
瑞利商的能量表达式为:

式中:Vmax—系统最大势能,T*—系统参考动能。
对于本研究中的等截面梁,一般采用受集中载荷梁静变形曲线或者自重梁静变形曲线为试算函数进行估算。下面将分别对两种情况进行计算。
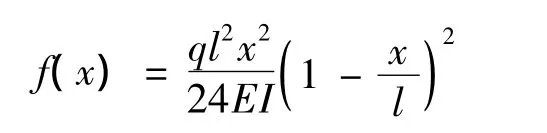
(1)以受集中载荷梁静变形振型曲线为试算函数估算:
式中:f(x)—振型曲线,f(x)=Plx2(3-4x/l)/48EI;M—集中质量点;l—圆环展开长度。
(2)以计自重梁静变形振型曲线为试算函数估算:

其中:
通过两种方法计算得到的基频分别为:420.31 Hz、434.09 Hz。同时,根据对解析解的分析,梁的基频与梁长度的平方成反比,即在材料选定、截面形状变化量有限的情况下,梁长度的轻微变化均会对基频造成影响,故在机械设计时,其尺寸与精度需要较高的要求。
2.2 柔性支撑结构响应分析
采用自重量阵型曲线作为基频试函数,利用主阵型对于质量矩阵与刚度矩阵的正交性,可求解系统的第一阶正则阵型。
系统初始条件:
将一阶主阵型Y1(x)代入归一化条件,得:
利用方程式(10)可得系统阵型系数C1。
计算正则坐标初始条件:
集中正则激振力:
综上所述,可得第一阶正则阵型为:

2.3 机械结构设计
具有稳定的转动中心和较小机械滞后特性是实现反射镜高精度回转的重要保证。FSM组成结构示意图如图2所示。
上端盖作为驱动负载的一部分,质量要尽可能轻,而且要求质心向FSM结构回转中心靠近。此外,上端盖设置凸台,可以减小温度变化和与反射镜粘接时对反射镜面形的影响。PZT高频运动时与其产生的接
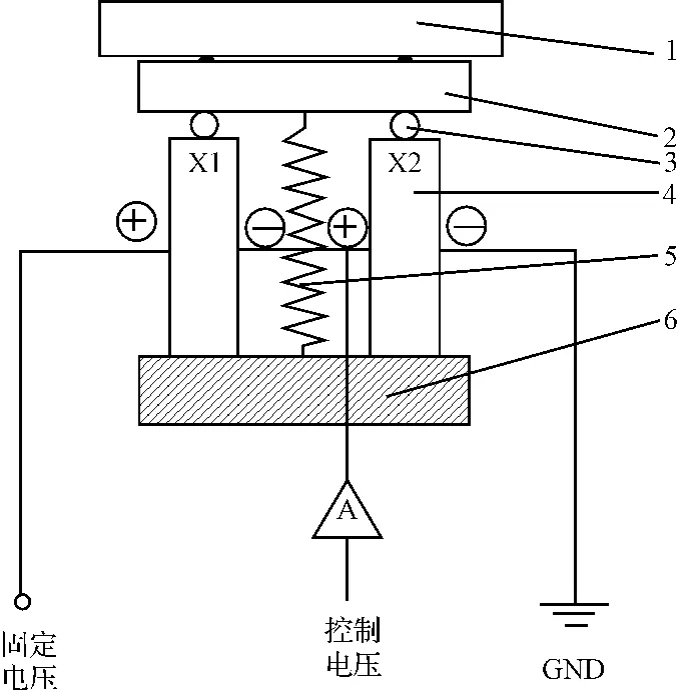
图2 FSM组成结构示意图
触应力将使接触点产生微小变形,从而影响系统精度,所以本研究选择45钢或铟钢材料,并对局部做表面处理。
PZT选择带球头型,使其与上端盖形成点-面接触,以避免对驱动器剪切造成破坏,而且两对驱动器顶点位于圆的垂直中心线,所以也形成两条虚拟回转轴。
PZT的主要参数如下:额定位移30±10% μm,最大输出力950 N,刚度25 N/μm。
由于PZT只允许施加推力,为了使FSM达到±4'的运动范围,需要对柔性支撑结构进行预紧,同时也需要控制其轴向加工误差小于0.006 mm。
2.4 FSM结构有限元仿真
PZT与上端盖为动态支撑,所以对结构谐振频率的影响可以忽略。同时上端盖在其质心位置可简化为集中质量,通过MPC点与柔性支撑结构连接。仿真结果显示一阶谐振为456.23 Hz,振型为柔性片沿光轴方向振动。
3 测量实验与结果
3.1 谐振测试
本研究采用电涡流位移传感器、信号发生器、示波器等对FSM空载时进行一阶谐振测量。信号发生器产生正弦电压信号,通过放大器放大驱动FSM运动,电涡流传感器探测FSM位置变化并产生相应电压信号,通过控制电路将该信号输入示波器并与初始正弦信号比较,从而得到FSM的频率[11]。测试结果为一阶谐振446 Hz,振型为弹性片沿光轴方向振动,与仿真分析结果一致。
3.2 校正能力测试
本研究对FSM校正能力进行测试,测试原理图如图3所示。改变微调反射镜的位置使初始光路发生变化,相机检测出光斑实际位置,并将结果反馈到控制器,然后由控制系统驱动X轴、Y轴上相应PZT,从而实现FSM的微小运动,反复迭代,直到光轴精确对准。实验所得抖动校正曲线如图4所示。经过数据处理后,系统校正能力如表2所示。
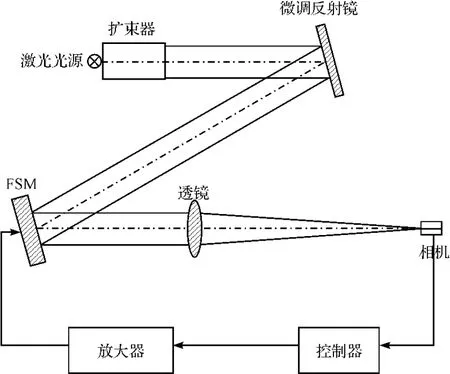
图3 校正能力测试原理图
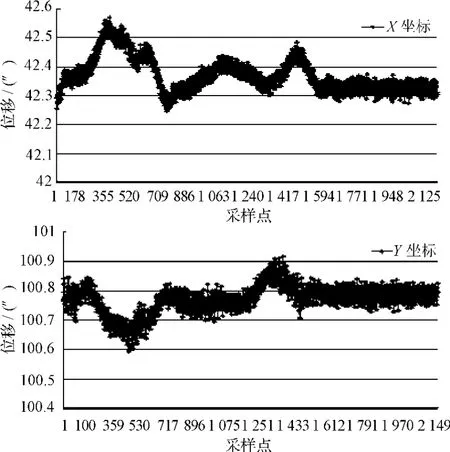
图4 X-Y抖动校正曲线
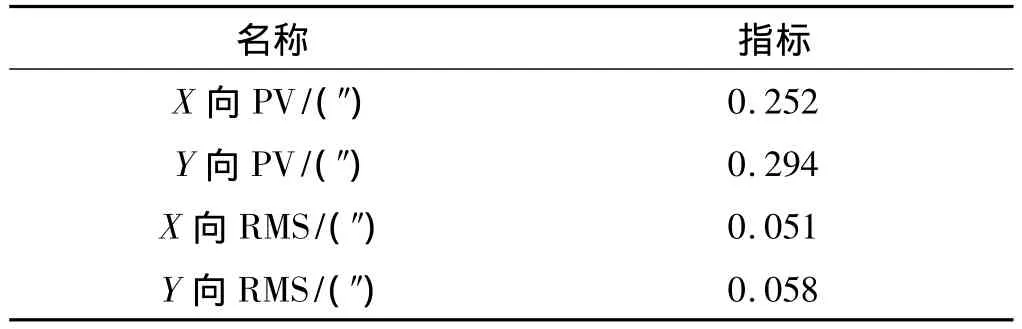
表2 系统校正能力
3.3 量程及一致性测试
对PZT输入0~100 V电压利用反射镜自准直原理测量FSM的运动范围和一致性。实验装置包括信号放大器、11倍放大电路、0.2 s自准直光管等。CH2通道(即Y轴)处于不同位置时CH1通道(即X轴)量程及一致性测量的结果如图5(a)所示,Y轴全量程测量曲线如图5(b)所示。
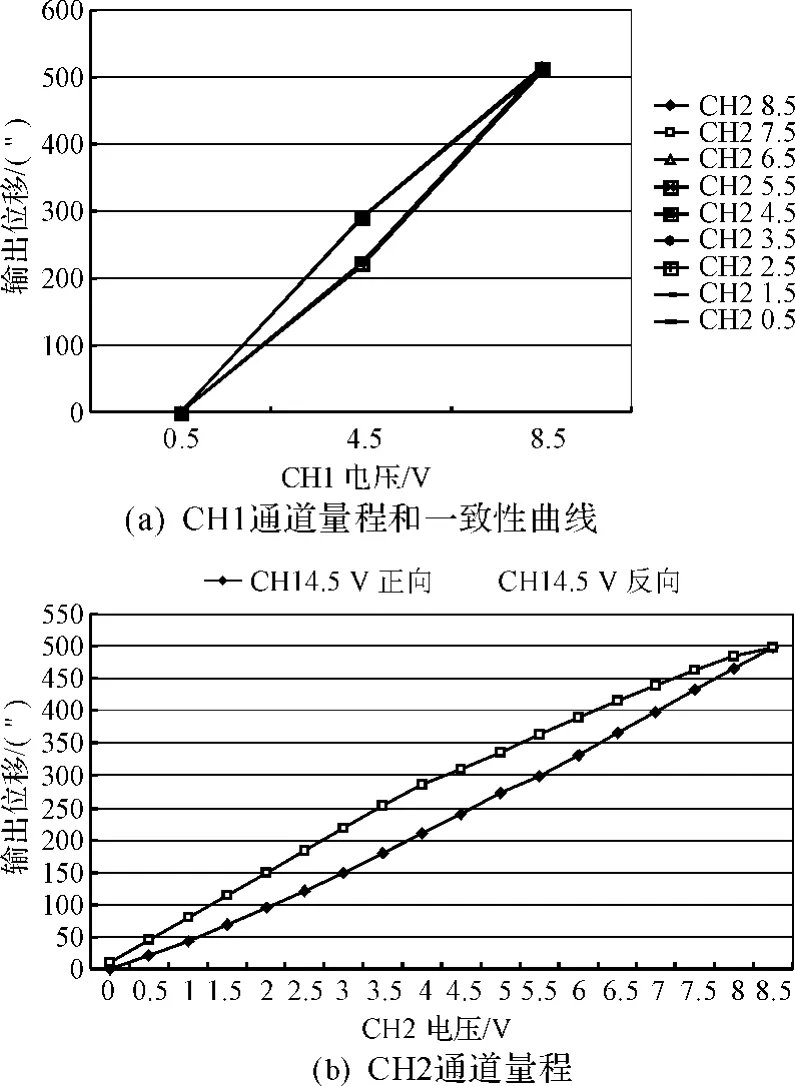
图5 量程及一致性测量
PZT的迟滞、非线性、蠕变等固有特性使FSM也具备了类似缺点,针对这一特性可以采用一些补偿和控制方法提高PZT的控制精度[12],进而对其驱动的FSM性能也有所改善。
3.4 测试结果分析
关于谐振频率这一参数,与实测结果相比,有限元分析结果的误差为2.29%,比较两种理论估算,以自重梁的振型曲线为试算函数估算较准确,误差为2.7%。造成误差的主要原因分析如下:
(1)进行理论推导时假设的振型函数与实际存在差别,谐振频率对梁长度的变化非常敏感;
(2)有限元模型为理想化模型;
(3)实际模型加工时存在误差。
4 结束语
本研究基于望远镜光路要求,设计了可以实现高精度控制光束并保持稳定的FSM结构,并进行了分析和实验验证。测试结果表明,所设计的两轴柔性支撑FSM性能稳定、响应速度快,而且结构简洁、便于拓展,可以作为FSM研究的一个新方向。研究结果证明:FSM结构谐振频率高,校正能力强,结构性能指标满足设计要求,可以应用于望远镜的精瞄系统和成像系统;但是PZT固有的迟滞、非线性等缺点也表现比较明显,值得进一步研究进行改善。
[1]FRANCISC M T,DEREK J E,TIMOTHY R H,et al.High bandwidth fast steering mirror[C].Proceedings of SPIE,2005:1-14.
[2]FELIX E,MORGAN S R,WASSON A,et al.Large,High Performance,Fast Steering Mirrors with FPGA-embedded Controls[C].Proceedings of SPIE,2009:1-10.
[3]徐新行,王 兵,韩旭东,等.音圈电机驱动的球面副支撑式快速控制反射镜设计[J].光学精密工程,2011,19(6):1320-1326.
[4]饶长辉,姜文汉,张雨东,等.云南天文台1.2 m望远镜61单元自适应光学系统[J].量子电子学报,2006,23(3):295-302.
[5]鲁亚飞,范大鹏,范世珣,等.快速反射镜两轴柔性支承设计[J].光学精密工程,2010,18(12):2574-2582.
[6]李 琳,杨 勇.空间曲线切口式柔性铰的设计[J].光学精密工程,2010,18(10):2192-2198.
[7]鲁亚飞.快速反射镜机械结构特性设计问题研究[D].长沙:国防科学技术大学机电工程与自动化学院,2009.
[8]凌 宁,陈东红,于继龙,等.大口径大角位移的两维高速压电倾斜反射镜[J].量子电子学报,1998,15(2):206-210.
[9]师汉民.机械振动系统-分析·测试·建模·对策(下册)[M].武昌:华中科技大学出版社,2004.
[10]夏其表,王 洁.基于虚拟仪器的精密球研磨加工的振动信号检测[J].轻工机械,2011,29(2):79-82.
[11]郑 斌,凌 宁.高速倾斜镜的频率响应函数测量[J].光电工程,1995,26(5):58-62.
[12]陈 辉,谭永红,周杏鹏,等.压电陶瓷执行器的动态模型辨识与控制[J].光学精密工程,2012,20(1):88-94.
