FPC 检测对位系统的视觉算法研究与应用
2013-09-13姬丽娟苗振海陈妍言
姬丽娟,苗振海,陈妍言,邓 强,方 波
(机科发展科技股份有限公司,北京 100044)
0 引言
电子信息产业是国民经济和国防建设的支柱产业,柔性印刷电路板(FPC)主要应用于手机、笔记本电脑、PDA、数码相机、LCM 等电子信息产品中,是其重要的组成部分。精密视觉检测技术在FPC的姿态识别及后续高速高精度定位控制中的应用,极大程度地提高了原有FPC 生产工艺的自动化水平,提升了产量及品质。因此,本文对机器视觉的应用及相关算法的实际效率、精度和速度进行了系统的分析和评价。
1 柔版加工工艺
柔性电路板简称软板或FPC,具有配线密度高、重量轻、厚度薄的特点。其一般工艺如图1所示。
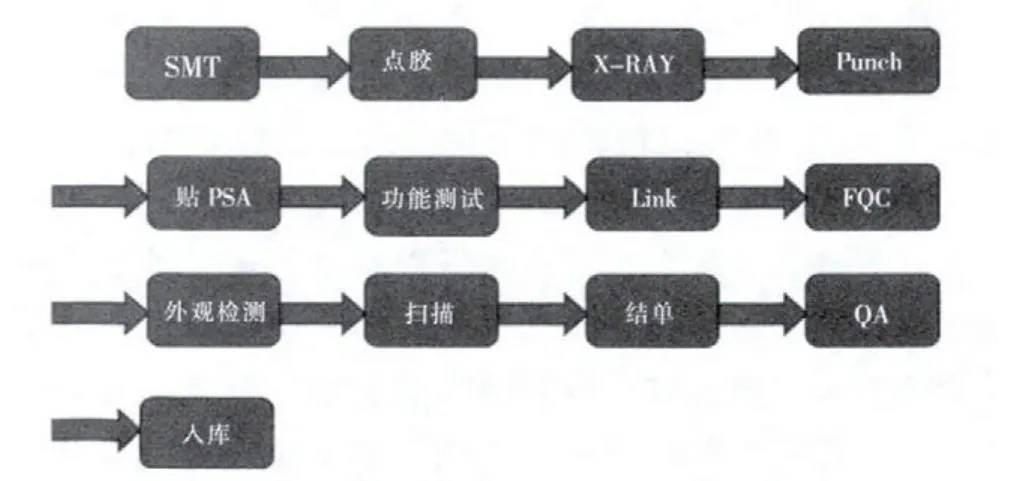
图1 FPC 加工工艺Fig.1 Processing technic of FPC
2 机器视觉定位系统
所谓机器视觉就是通过软、硬件的组合,赋予机器类似于人类视觉的功能。它以视觉处理理论为中心,是图像处理、模式识别、计算机技术和生理心理学为基础的信息处理科学中的一个重要分支。视觉系统一般包含硬件系统和软件,其中硬件系统组成为摄像机、镜头、光源、采集卡、计算机。软件处理一般包含图像处理分析、特征提取和模式识别等。为了能更好地检测到轮廓和姿态,本系统采用了底部打光,而为了防止真空吸附固定后的FPC的意外翘曲造成图像处理偏差,使用了Moritex的远心镜头,为了保证精度,相机采用到位PLC握手通信内触发模式,选用大恒HV5051M 相机,500万像素,象元大小为2.2μm×2.2μm。其检测对位流程如图2所示。

图2 检测对位系统流程Fig.2 Flow chart of inspect and counterpoint system
HALCON 是一款功能十分强大的机器视觉软件,它可以提供1000 多个运算子。本系统就是在Vc6.0的平台来调用HALCON的图像处理的各个算子。
3 基于阈值分割技术和基于形状的图像匹配技术
鉴于FPC的形状特征,在对工件的识别过程中,主要会用到基于阈值的图像分割和基于形状的图像匹配技术,下面分别对两种图像技术进行简要介绍。
3.1 基于阈值的图像分割技术
图像分割是通过对原始采集图像进行某种方式的分割处理,以便于从其结果中提取到图像的特征(如轮廓、区域等)的过程。阈值图像分割技术上图像分割技术中最基本也是最常用的一种方法,它通过对原始图像的灰度直方图进行具体分析,以获得前景与背景或者不同区域之间的一个或者几个灰度阈值,然后将具有每一个阈值两侧的灰度值的像素分别设置成相同的颜色,从而达到将图像进行分割的目的。阈值分割主要有以下几种方法:基于点的阈值分割、基于区域的阈值分割、局部阈值分割以及多阈值分割等。
阈值分割方法中最简单的形式就是单阈值分割,设原始图像灰度为 f(x,y),通过其灰度直方图信息得到一个灰度阈值t,应用公式:

将得到一个分割后的二值化图像。若取b0=0(黑),b1=1(白),得到的就是通常所说的黑白二值化图像。
3.2 基于形状的匹配
当图像进行分割之后,就要从中提取出各种特征,如灰度特征、纹理特征以及形状特征,进而才能进行图像匹配。
图像匹配是通过一定的匹配算法在采集图像和模板图像之间识别同名点的过程,其实质是在基元相似的条件下,运用匹配准则的最佳搜索问题。图像匹配主要可以分为基于灰度的匹配和基于特征的匹配,基于形状的匹配是特征匹配的一种,是本实验图像处理开发软件HALCON 中最常用的匹配方法。
4 系统识别FPC 特征的三种方法
由于HALCON 软件具有很好的开放式结构,本设备视觉系统在Windows XP 环境下,采用HALCON 和VC++6.0 联合编程的方法进行FPC 识别算法的开发。一方面能很好地使用HALCON 强大的图像处理功能,另一方面又能保证程序的兼容性、高效性以及界面的友好性。系统提供的FPC 特征点识别方法有三种,分别为手动区域选择法、基于阈值分割的识别定位、基于形状模板匹配法。
使用HALCON 大小为(2×2)mm 专用定做的标定板(标称精度为±1μm),进行数十次摄像机标定,确定摄像机的内外部平均参数,其中标定出的三组十五张不同位置重要的缩放比例因子如表1所示。

表1 摄像机标定的重要参数
4.1 手动区域选择法
手动区域选择法的组成步骤:第一,图像采集与显示;第二,手动产生ROI;第三,图像处理;第四,特征区域识别,如图3所示。
4.2 基于阈值分割的图像处理
本方法与第一种方法在图像采集与显示、图像处理以及特征识别上基本一致。但是考虑到自动化生产效率较高、FPC 定位精度要求高的因素,故将第一种方法的第二步改进成为自动阈值分割,并且对轮廓进行膨胀处理,使其进行亚像素级处理并直接产生ROI,这种方法的关键是FPC 颜色与背景颜色不同的特点;本方法同时利用了HALCON 里面专有的一种xld 数据结构,专门存储一组虚拟的轮廓模板。主要使用的HALCON 算子步骤:第一,阈值分割;第二,形态学处理;第三,亚像素分割;第四,区域特征选择(选取轮廓长度大于62000 后的图像);第五,定位,如图4所示。

图3 手动区域选择法最终结果Fig.3 Final result based on manual selection
4.3 基于形状的模板匹配
本方法使用HALCON 使用较多的基于形状的模板匹配,即使目标已经旋转、缩放、部分遮挡或者照明有非线性变化,其亚像素精度匹配技术也可实时地有效、准确地找到目标。步骤:第1 步,模板图像采集;第2步,建立模板;第3 步,采集新图像;第4 步,图像匹配,结果如图5所示。

图4 基于阀值分割方法的最终结果Fig.4 Final result based on threshold method

图5 基于形状的模板匹配结果Fig.5 Final result based on shape template matching
5 三种方法的分析及比较
(1)从程序执行的角度看,三种方法在读取图像步骤基本一致,但是从第二步就有了明显的区别。第一种方法虽然通过手动选择ROI 来减少电脑阈值分割和区域选择所用的时间,但是这种方法的弊端在于需要人工干预,不能满足高效率的自动化生产线,如果直接使用全局的阈值也可以实现自动化,时间上会略有增加。第二种方法将阈值分割扩大到整张图,虽然在阈值分割以及区域选择和亚像素处理等多花了0.03s的时间,但是去掉了人工画圆的步骤,很好地实现了完全自动识别的功能,第二种方法总共的时间在0.1s 以内。第三种方法的速度也很快,如选择亚像素精度模板匹配的时间在0.04s 以内,总共花费时间在0.1s 以内。
(2)从程序执行的精度上看,第一种方法为像素级精度,第二种是亚像素级精度,第三种可以自由选择是像素级还是亚像素级精度。其利用相机的标定后的参数转化为世界坐标,精度基本都能达到5μm 左右。实验的结果详见表2,实验中使用辨率为1μm 磁性表座值作为参考。
(3)从各自的应用范围来看,第一种方法主要应用在FPC 上有元件类型与圆孔相似的情况中,此时的圆孔难以通过全局发展分割而得到,因此可以借助于手动,划分出小的ROI 区域来识别出圆孔,第二种方法则适合大批量生产,只要各批次的PCB 板定位孔大致相同,就可以用此方法完成,由于视场较小,基本没有其他圆干扰,现场使用情况不错。第三种方法增加了操作员的灵活性,可以根据现场工件的改变而选择合适的模板匹配,即不需要工件有圆孔就可以进行识别,而且可以根据需要进行精度、速度、匹配度的选择,更符合现场情况和客户要求。

表2 三种方法实际精度
6 总结
自动光学检测技术在FPC 制造中的应用越来越广泛,随之而来的就是各种检测设备及配套算法的开发,本文在WindowsXP 环境下通过HALCON与Vc++的联合编程,用三种不同的算法实现了FPC 快速的识别和定位,对其各自的效率、精度和应用范围行了实验分析和比较,其中模板匹配具有更好适应现场环境,同时软件具有数据库管理以及与下位机PLC 通信、数据统计等功能,可稳定运行。
[1]Carsten Steger,Markus Ulrich.机器视觉算法与应用[M].清华大学出版社,2008.
[2]罗珍茜,薛雷,等.基于HALCON的摄像机标定[J].视频应用与工程,2010,05.
[3]Milan Sonka,Vaclav Hlavac,Roger Boyle.图像处理分析与机器视觉[M].清华大学出版社,2011.
[4]张铮等.数字图像处理与机器视觉—Vc++与Matlab 实现[M].人民邮电出版社,2011.
[5]李良福,陈卫东,等.目标跟踪与定位中的视觉标定算法研究[J].应用光学,2008,4.
[6]彭晓辉.基于HALCON的IC 卡喷码符号识别技术研究与实现[D].广东工业大学,2006.
[7]李鹏程,范彦斌,等.基于HALCON的PCB 光学定位点的3 种识别方法及比较[J].佛山科学技术学院学报,2010,28~33.
[8]姚立新,张武学,连军莉.AOI 系统在PCB 中的应用 [J].电子工业专用设备,2004.
