斯特林机菱形传动机构动力学建模与刚柔耦合问题求解
2013-09-13冯治恒曹华军
冯治恒,曹华军
(1.广西柳工机械股份有限公司,广西 柳州 545007;2.重庆大学 机械传动国家重点实验室,重庆 400030)
0 引言
斯特林机是以多种燃料为能源的闭循环回热式发动机,它具有高效率、低噪声、低污染以及多能源适应性等特点;与其他内燃机相比,不同的是它的工作气体被封闭在机器内部,并在各腔室间循环使用。因此,它在解决能源紧张,减少环境污染以及军事领域等方面具有重要意义。由于当今世界能源危机和环境污染问题越来越严重,斯特林机的研究工作引起了人们的重视,目前已成了研究热点[1]。
长期以来斯特林机的研究集中在斯特林机热交换系统的设计与研究等方面[2~4],而对斯特林机的传动机构研究较少。Chin-Hsiang Cheng 等从受力方面论述了菱形机构的传动机理[5,6],D.J.Shendage 等主要研究了型斯特林机菱形机构的力学问题[7]。然而斯特林发动机菱形传动机构在仿真分析方面,主要以刚性系统仿真分析为主[8~11],关键零部件结构分析是在零部件静态条件下通过施加载荷来求解系统的运动规律,而忽略了菱形机构在运动过程中关键零部件的弹性变形及其动应力效应。
本文以斯特林机为研究对象,采用多体动力学理论,建立斯特林机及菱形机构数字样机,柔性化处理斯特林机关键零部件,运用刚柔耦合仿真分析方法,获得配气活塞和动力活塞在位移、速度、加速度的运动规律等,可为斯特林发动机菱形传动机构的研发提供科学依据。
1 刚柔耦合模型的动力学分析理论基础
刚柔耦合系统动力学与多刚体动系统动力学及结构有限元均有密切联系。因此,在建方程时,刚体系统可按照多刚体动力学理论建立方程,柔性系统化可用有限元建立方程,上述方程的组合就是刚柔耦合的多体动力学方程。本文所研究的是基于第一类拉格朗日方程的刚柔耦合动力学模型[12]:

式中: φj—约束方程; λj—拉格朗日乘子向量;qi—柔性体的广义坐标;T—构件的动能;V—柔性体的势能;Qi—施加的广义力。
2 刚柔耦合动力学仿真模型
斯特林机是一种利用外部热源加热发动机头部,使活塞往复运动做功的外燃机。所采用的菱形传动机构包括有两个活塞,即动力活塞和配气活塞,动力活塞主要作用为引导工质的压缩与膨胀过程来做功,配气活塞用于分开冷热腔,并引导工质在冷热腔中循环流动。斯特林发动机的数字化样机是在某型斯特林发动机的实际测绘数据基础上,利用三维建模技术及工具软件Pro/E 实现,其三维结构如图1所示。
斯特林发动机在高速运转过程中,连杆为主要传递动力的部件,由于传递功率大,运转速度快,在运动过程中容易发生变形,影响其运动的准确性。根据柔性零件原则:在仿真过程中对于受力小、刚性大、运动中柔性特征不明显的构件可被视为刚体,相反那些受力大、刚性小、柔性特征非常显著的构件必须视为柔性体,因此需要柔性化处理菱形机构连杆。通过将刚体动力学仿真模型中的刚性连杆替换成柔性体的方法,建立菱形机构的刚柔耦合动力学模型,施加与多刚体模型完全一致的驱动参数及载荷条件,进行动力学仿真,可以得到耦合系统的运动学和动力学特性。
采用有限元软件ANSYS 来生成模态中性文件,建立起柔性体。将需要柔性化的连杆构件导入ANSYS,进行网格划分、外部连接点与刚性区域的确定。表1为连杆柔性体的材料特性参数。

图1 斯特林发动机数字化样机Fig.1 Digital prototype of stirling engine
表1 连杆柔性体的材料特性参数Tab.1 Material parameters of connecting rod flexible body
在连杆两端孔中心分别建立外部连接点,并在外连接点与连杆之间建立两个刚性区域,用于传递刚性体和柔性体之间的力和约束。用有限元分析软件ANSYS 获得连杆的前12 阶模态,其固有频率如表2所示。
根据设计参数,斯特林机设计转速为1500r/min,换算为ADAMS 默认单位为1500×360d/60s=9000d/s, 即转速为9000d·time。二维坐标原点为活塞中心线与过曲轴同步齿轮中心连线的交点,X轴正向为原点指向缸套内壁的方向,Y轴正向为原点指向动力活塞的方向。根据菱形传动机构的运转周期和分析需要,设置仿真时间为0.1s,步长设置为1000 步,进行仿真,柔性化处理之后我们重点分析柔性化连杆对动力活塞与配气活塞的运动所产生的影响。

表2 连杆模态参数Tab.2 Modal parameters of connecting rod

图2 动力活塞和配气活塞Y 向位移曲线Fig.2 Y direction of displacement curve of power piston and displacer piston
从理论上讲,考虑了连杆弹性变形的刚柔耦合动力学分析结果应当更加接近于实际情况,下面的对比能很好的说明这一点,相关仿真结果见图2~5所示。图中分别为相同条件下菱形机构多刚体模型和刚柔耦合模型计算得到的动力活塞及配气活塞的位移、速度、加速度对比曲线。其中图2 说明在多刚体模型和刚柔耦合模型中,配气活塞与动力活塞Y 向位移存在约0.2mm的差值,造成这种偏差的主要原因是引入连杆柔性体的弹性变形所致。图3、图4、图5为动力活塞与配气活塞在两种情况下的速度与加速度曲线。在运动过程中,两种情况下活塞的速度曲线基本一致。

图3 动力活塞和配气活塞Y 向速度曲线Fig.3 Y direction of speed curve of power piston and displacer piston
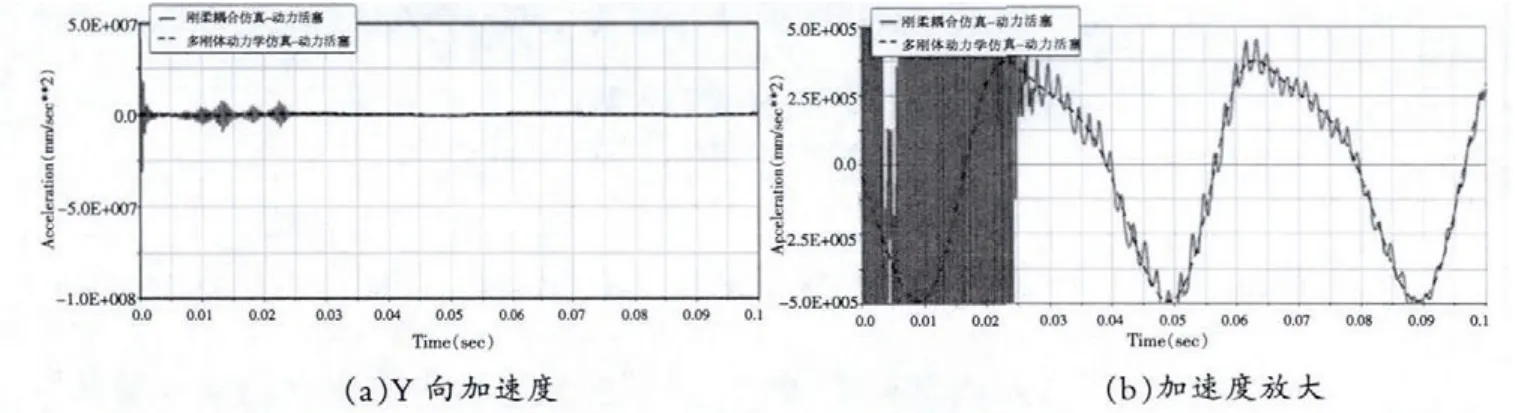
图4 动力活塞Y 向加速度曲线Fig.4 Y direction of acceleration curve of power piston
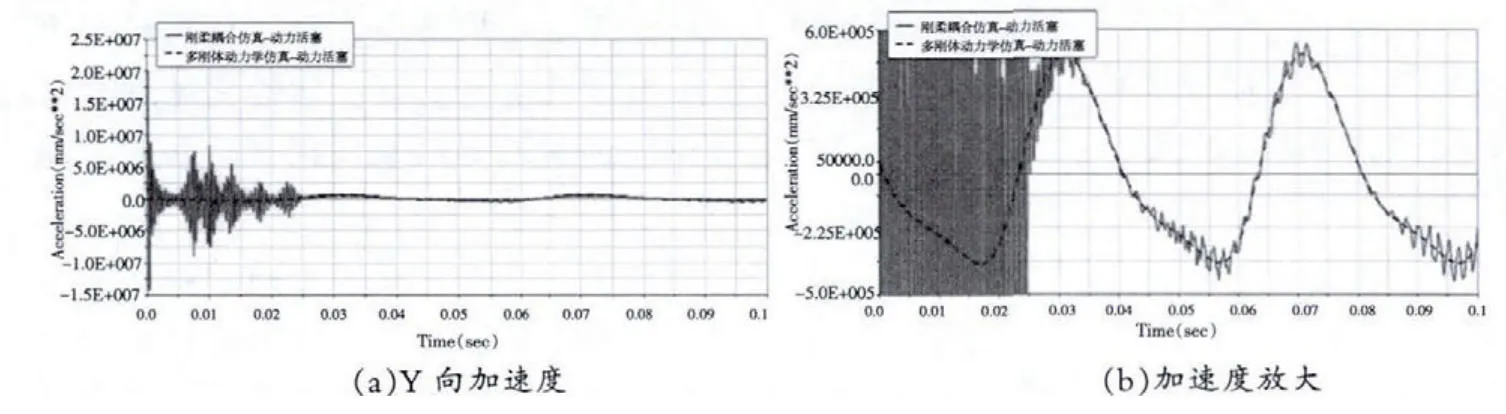
图5 配气活塞Y 向加速度Fig.5 Y direction of acceleration curve of displacer piston
可见在刚体模型下,各曲线如位移、速度、加速度、受力等均为光滑曲线,并随着曲柄轴转角的变化呈现出周期性变化的规律;当引入连杆柔性体后,各曲线出现了无规律的震荡,尤其是在起动阶段,其峰值出现了很大的变化,但其总体变化规律与刚体模型大致相同,这说明连杆柔性体自身的绕曲变形影响了整个机构的载荷,使得工作情况更为复杂,更加接近于机构的真实运动状态,仿真精度更高,计算得出的相关载荷数据更为可靠。
菱形传动机构中多个连杆构件的弹性变形对整机的影响不能忽略。在运动学方面,影响活塞的移动范围,从而影响整机输出功率;在动力学方面,影响到整个菱形机构的动应力和动态特性。引入柔性体进行动力学分析的主要目的是通过考虑弹性体的变形以及各弹性体之间的高度耦合作用,更准确的确定各部件之间的载荷传递关系。
3 结论
本文建立了斯特林机的数字样机,针对斯特林机复杂的动力学特性及菱形机构连杆的复杂受力情况及运动特点,柔性化处理了连杆这一关键零部件,在此基础上进行了动力学仿真分析,获得了连杆的前12 阶模态。针对连杆在运动过程中的弹性变形,首先对系统进行刚体模型仿真,然后用柔性连杆替换刚性连杆,重新对系统进行仿真分析,分析对比了动力活塞和配气活塞的运动过程,获得了配气活塞和动力活塞在位移、速度、加速度的运动规律,分析了斯特林机启动过程中的震荡规律。得出了更加接近机构真实运动状态仿真模型。为斯特林机菱形机构的刚柔耦合问题分析提供了可鉴的新方法,也为斯特林机的工况设计及机构优化提供了可信的指导。
[1]H.NAITO,Y.KOHSAKA,D.COOKE,et al.Development of a solar receiver for a high-efficiency thermionic/thermoelectric conversion system[J].Solar Energy,1996,58.
[2]钱国柱,等.严善庆.热气机原理与设计[M].北京:国防工业出版社,1987.
[3]黄护林.太阳能斯特林发动机的性能模拟[J].太阳能学报,2004,5.
[4]赵耀.太阳能斯特林热气机热交换系统的设计与研究[D].合肥:合肥工业大学,2009.
[5]Chin-Hsing Cheng,Ying-ju Yu.Combining dynamic and thermodynamic models for dynamic simulation of a beta-type stirling engine with rhombic-drive mechanism[J].Renewable Energy,2012,37.
[6]Chin-Hsing Cheng,Ying-ju Yu.Numerical model for predicting thermodynamic cycle and thermal efficiency of a beta-type stirling engine with rhombic-drive mechanism[J].Renewable Energy,2010,35.
[7]D.J.Shendage,S.B.Kedare,S.L.Bapat.An analysis of beta type stirling engine with rhombic drive mechanism[J].Renew able Energy,2011,36.
[8]薛梅,吉晓民,丁晓峰.热气机菱形传动机构的尺寸综合及运动仿真[J].机械科学与技术,2005,2.
[9]丁晓峰.菱形传动机构热气机的设计研究[D].西安理工大学,2004.
[10]刘善增,朱真才,余跃庆,等.空间刚柔耦合并联机构系统的频率特性分析[J].机械工程学报,2011,23.
[11]张斌,徐兵,杨华勇,等.基于虚拟样机技术的数字式柱塞泵控制特性研究[J].浙江大学学报(工学版),2010,1.
[12]金国光,云今天,杨世明,等.柔性变胞机构动力学建模及仿真研究[J].华中科技大学学报(自然科学版),2008,11.
[13]傅德彬,姜毅.基于刚柔耦合模型的发射装置动力学仿真分析[J].系统仿真学报,2009,6.
[14]Adam Hawkes,Matther Leach.Impact of temporal precision in optimization modeling of micro-combined heat and power[J].Energy,2005,30.
[15]朴明伟,丁彦闯,李繁,等.大型刚柔耦合车辆动力学系统仿真研究[J].计算机集成制造系统,2008,5.
