地震模拟振动台三参量控制技术的研究
2013-09-12陈若珠
陈若珠 张 波
地震模拟振动台三参量控制技术的研究
陈若珠 张 波
(兰州理工大学电气工程与信息工程学院,兰州 730050)
针对电液伺服振动台单纯的以位移控制为基础存在着使用频率狭窄和系统阻尼小的缺陷而不能很好地实现波形复现的问题,本文根据地震模拟振动台振动控制系统的工作性能,在对液压系统进行一定线性化处理的基础之上,搭建了系统的数学模型。在单纯位移控制的基础上,增加了加速度和速度环节设计三参量控制器,分别用PID控制和三参量控制的方法对电液振动台进行仿真研究,比较了PID控制和三参量控制的优缺点。仿真结果表明,三参量的方法能有效地增大系统阻尼防止共振破坏,增强了系统的稳定性。
电液振动台 PID控制 三参量控制 频带 阻尼 仿真
引言
电液伺服地震模拟振动台的负载较大,要使振动系统达到指定的加速度,必须要用高频信号去除激励,单纯的位移控制会落在共振频率之内。经过多年的发展,振动台系统的控制技术得到了飞速的发展(贾丽华,2006)。传统的控制技术是基于位移控制的PID控制方式,PID控制方法开始于20世纪50年代,主要由比例单元P、积分单元I和微分单元D组成。电液伺服控制设计基本上采用基于工作点附近的增量线性化模型对系统进行综合分析,以位移控制为基础的PID控制技术因其控制规律简单而被广泛运用。但是电液伺服系统的严重不确定非线性,环境和任务的复杂性,对系统的抗干扰能力要求越来越高,对于频带的宽度和跟踪能力的要求也在提高。因此,这一类典型的不确定非线性系统难以精确建模。在这种情况下,单纯的PID参数调节需要一定的过程,并且当系统的一些参数发生变化时,控制器的参数难以满足系统的要求(黄茹楠,2009;方重,1999)。
三参量控制算法主要是为了补偿电液伺服振动台在单纯的位移控制时频率不宽、阻尼较小的缺陷,从而更好地实现不同频段的加速度、速度、位移控制。只有加强三参量控制中的位移控制低频段、速度控制中频段、加速度控制高频段,才能拓宽频带(李振宝,2010)。
本文的研究对象是尺寸为4m×4m的地震模拟振动台系统,台体重13100kg,一般振动台系统水平方向的有效工作频率只有40—60Hz左右,而且液压动力机构的阻尼比较小,稳定裕量很低,如果想要频宽达到80—100Hz左右就要对系统进行补偿,理论上三参量反馈方法可以更好地改善系统的稳定性,提高系统阻尼比,同时可以对不同的控制参数实现不同的输入量控制方式(周惠蒙,2007)。本文研究了常规PID控制和三参量控制按照地震模拟振动台系统要求实施控制,以及通过Simulink仿真比较了两种控制的特点。
1 伺服系统及其负载数学模型
电液伺服地震模拟振动台由于伺服阀等非线性影响及其台体与试件的共同作用,在本质上是一个十分复杂的非线性系统。本文在对系统特性进行分析的基础上,给出了进一步的线性化模型,通过对线性化模型的结构和参数变化来等效模拟系统的非线性和不确定性。黄浩华(2008)基于伺服系统的工作原理,在液压传动中用三连续方程来描述,现假定载荷性质为纯惯性负载,亦即通常在分析地震模拟振动台时的基本假设。
式(1)中的第一式为荷载的惯性力与作动缸的出力平衡方程。式(1)中的第二式为作动缸需要的流量,由三部分组成:第一部分与作动缸活塞运动速度成正比,直接作功用;第二部分为油液量可压缩体,随负载压力变化而变化;第三部分为泄漏量,与负载压力成正比。式(1)中的第三式为伺服阀的输出流量与控制信号的关系,它还包含有损失的一部分流量,此为由伺服阀的压力流量系数随负载压力变化而变化的流量值。将式(1)消去负载压力和流量后可得到:
令
(3)
(4)
由此可知,液压缸及其负载作为被控对象,由一个二阶惯性环节和一个积分环节组成,由于积分环节的存在,系统为一个不可控对象,不能使作动缸定位。分析地震模拟振动台系统的性能参数,同时参考关广峰(2007)关于振动台的参数设定标准,得到本文液压系统的开环传递函数为:
2 三参量控制器的工作原理
三参量信号发生电路如图1所示。
三参量主要通过模拟电路实现,输入信号通过模拟电路生成三个信号。
(7)
本文在参考关广峰(2007)关于地震模拟振动台工作的基础上,对于振动台工作期望的传递函数为:
为消除闭环传递函数中距离虚轴较近的极点,达到扩展频宽的目的,本文串入一个二阶微分环节对消。前馈环节为,通过计算可得3个参数分别为:32.2287、0.1331和0.0003。
3 控制器的参数设计与仿真
3.1 PID参数整定
常规PID控制系统原理如图2所示。
PID控制器是一种由比例环节、积分环节和微分环节三个环节组成的线性控制器,在系统参数、工况变化不是很大时,能够较好地控制系统的瞬态和稳态特性。对于参数整定,本文利用Ziegler公式整定PID参数。在实际的过程控制系统中,有大量的对象模型可以近似的由这样的一阶模型来表示(图3)。也可以通过测取对象模型的阶跃响应,来获取、和(或)参数(李敏霞,1997)。
参数可以由=来求取,参数则可以由表1给出的经验公式设计PID控制器。
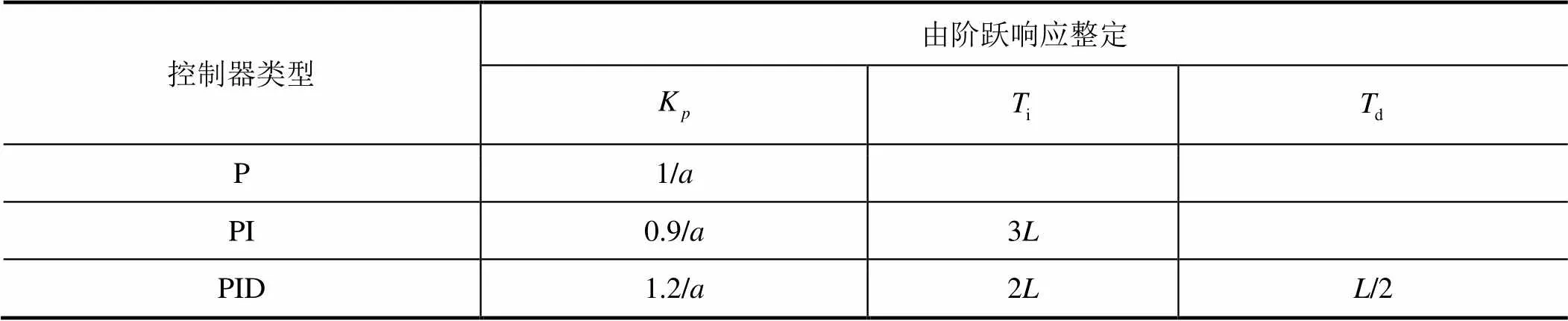
表1 PID控制参数整定表
要得到PID控制的整定参数,需要先实现振动台模型的控制。
图4是振动台控制的阶跃响应图,可以根据相应的曲线求得、、参数,根据相应的PID参数整定表求出需要的PID参数。根据公式判据可以得到PID参数:K=0.063,K=1.9,K=0.475。通过对参数的不断设定与比较,可以得到PID控制参数的设置为:K=0.16,K=1.94,K=0.02。
3.2 三参量反馈调节
在MATLAB中,对三参量反馈进行模拟仿真。
三参量控制在反馈调节中加入位移反馈、速度反馈和加速度反馈,避免单一位移控制时对一些高频的情况不能很好的控制导致波形失真,图5中三参量发生器产生的信号与反馈信号对比,用合适的信号控制振动台系统的动作完成实验。
3.3 PID与三参量反馈调节仿真结果
PID控制与三参量控制得到的仿真图形为:图6表示PID控制的响应幅频特性,在共振点附近阻尼较小,较强的振幅对振动台工作有一定影响,不利于波形的复现;图7表示三参量控制的响应幅频特性,有效地增大了共振点附近的阻尼,减小了振幅对振动台的影响,增强了系统的稳定性。
3.4 PID与三参量方式控制下的振动试验
地震模拟振动台实验是要模拟期望的振动环境和检验试件的抗震性能,考虑到振动台在工作过程中受到的扰动以及自身的非线性,需要对期望波形不断迭代来达到预期效果。在PID控制与三参量控制下对预期波形进行迭代,对向自由度复现波形对比研究如图8和图9所示。
4 结论
由图6和图7得到的仿真分析可知,针对振动台所提出的三参量控制,在共振点附近的阻尼较大,抑制振幅,减小了对振动台的破坏,并且具有较强的自适应能力和鲁棒性能,提高了振动台系统的综合控制品质指标。
图8与图9是系统在PID控制与三参量控制方式下的迭代波形,三参量控制方式下的迭代波形更接近期望波形。本文理论上的仿真研究还需进一步的试验验证。
方重,1999. 模拟地震振动台的近况及其发展. 世界地震工程,15(2):89—91.
关广峰,2007. 液压驱动六自由度振动试验系统控制策略研究. 哈尔滨:哈尔滨工业大学.
黄茹楠,2009. 电液振动台的模糊PID研究. 液压与气动,(4):36—38.
黄浩华,2008. 地震模拟振动台的设计与应用技术. 北京:地震出版社,57—76.
贾丽华,2006. 电液伺服地震模拟振动台控制算法的研究. 北京:北京交通大学.
李振宝,2010. 地震模拟振动台三参量控制算法超调修正. 振动与冲击,10(29):211—215.
李敏霞,1997. 伺服振动台的振动控制技术及应用振动. 测试与诊断,9(17):23—26.
周惠蒙,2007. 基于迭代学习控制的电液伺服振动台控制系统的研究. 湖南:湖南大学.
Ammanagi S., Poornima V., Sera A. et al., 2006. Development of a digitally three-axis earthquake shake table. Current Science, 91 (2): 190—203.
The TVC Control Technology of Shaking Table
Chen Ruozhuand Zhang Bo
(College of Electrical and Information Engineering, Lanzhou University of Technology, Lanzhou 730050, China)
It is difficult to finish the reproduction of earthquake wave when the frequency is narrow and damping is small by using simple displacement control. In this study we use PID and TVC control to obtain the simulation of shaking table test which based on the mathematical model of system and its components with a linearization process. By comparison of the difference of PID and TVC control, we find that the result of simulation with the TVC control can increase the system damping, prevent the resonance damage and thus improve the stability.
Hydraulic shaking table; PID control; TVC control; Frequency band; Damp; Simulation
2013-01-14
陈若珠,女,生于1963年。高级工程师,硕士生导师。主要研究方向:智能控制理论与应用、模式识别。E-mail: zhangbosd126@126.com
