船舶电力系统3相短路故障仿真
2013-09-11张会焱施伟锋
张会焱,施伟锋
(上海海事大学物流工程学院,上海 201306)
0 引言
随着船舶向超大型方向发展,其电力系统的复杂程度越来越高,尤其是全电力推进船舶的出现,使船舶电力系统容量和发电机单机容量不断提高.[1-3]船舶电力系统的数字仿真成为其设计、调试和各种故障试验所依赖的一种有效且经济的手段,而船舶电力系统的建模是其系统仿真的基础.
针对船舶电力系统的建模与仿真,国内外均有相当多的研究.王淼等[4]研究全电力推进船舶电力系统的数学模型并进行系统仿真,但没有研究船舶电力系统故障状态下的特性;DIAMANTIS等[5]研究船舶电力推进电机的DTC特性;ARENDT[6]建立的船舶电力系统仿真模型考虑柴油发电机的特性、轴模型、变螺距模型;陆金铭[7]对船舶推进装置进行仿真研究;夏永明[8]介绍的分布式船舶电站多种发电方式联合运行仿真系统构成嵌入式物理-数学仿真;谢卫等[9]对船用多相无刷直流推进电动机进行分析建模与仿真;沈爱弟等[10]根据电力推进系统的特性,对推进电机运动控制、推进系统运行状态控制和船舶电网谐波治理进行研究,设计出内河船舶电力推进系统;刘崇等[11]设计的船舶电力推进试验平台由发电机组、推进变频器、推进电机、负载变频器和负载电机组成,能够模拟船舶电力推进试验,是实物结合软件的模拟仿真;刘昭等[12]设计异步电动机模拟负载能量回馈方式的交流传动试验平台,为港航领域大功率交流传动系统的研制开发提供试验环境,这是硬件实物方式的仿真.本文基于发电机及负载的动态特性,搭建船舶电力系统动态数字仿真平台,并在此基础上对船舶主推进电机3相短路故障进行仿真和分析.
1 船舶电力系统动态数字仿真平台
本文建立的船舶电力系统动态数字仿真平台,其模型中包含同步发电机及其励磁系统子模型、柴油发电机组控制系统子模型、感应电动机子模型和静态负荷子模型等.
1.1 同步发电机建模
船舶电力系统的特性很大程度上取决于同步发电机子系统的特性,船舶大功率发电机组具有频率与电压相互作用的特性及非线性特性.本文的船用同步发电机模型采用凸极发电机,由柴油机驱动.在船舶电力系统动态仿真中,依赖于频率的同步电机模型是基于标准IEEE 2.1同步发电机模型发展起来的,文献[13]给出其数学模型.
1.2 船舶柴油发电机组控制系统建模
建模考虑发电机电压与频率间的相互作用.系统负载变化时,发电机的电枢反应会导致发电机端电压的变化.这一关系用隐极发电机的电压平衡方程式描述为


式中:f为发电机频率;N为发电机绕组匝数;Φm为发电机磁通.由式(1)和(2)可见,发电机频率与端电压之间存在相互关系,在控制中须予以考虑.
船舶柴油发电机组由柴油原动机、发电机、调速器和相复励调压装置组成.船用柴油发电机控制系统结构框图见图1.转速反馈子系统检测发电机的转速,励磁反馈子系统的相复励调压装置检测发电机的端电压和输出电流两个信号.转速控制器控制油门执行器,油门执行器控制柴油机输出相应的机械功驱动发电机旋转,调节有功分量.励磁机接收励磁控制器的信号以控制发电机输出符合要求的电压,调节无功分量.
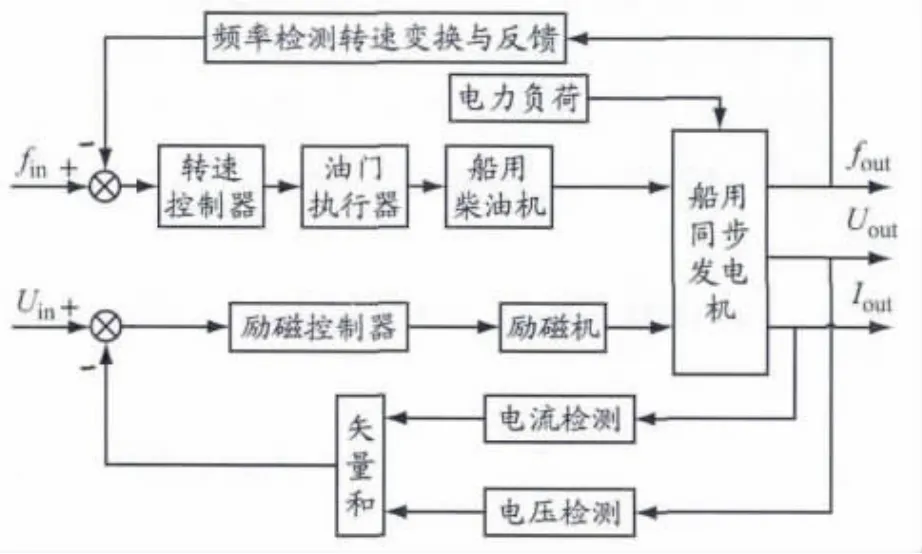
图1 船用柴油发电机控制系统框图
建模还考虑发电机与柴油机之间的轴转矩模型.所建立的同步发电机组轴转矩模型见图2.

图2 同步发电机组轴转矩模型示意图
柴油原动机转动方程为

联轴器转动方程为

发电机转动方程为

式(3)~(5)中:ωT为原动机转速;ωC为联轴器转速;ωG为发电机转速;ωRef为发电机参考转速;θ1为原动机角位移;θ2为联轴器角位移;θ3为负荷角位移;HT为原动机转动惯量;HC为联轴器转动惯量;HG为发电机转动惯量;D为发电机阻尼系数;D1为原动机与联轴器间的阻尼系数;D2为联轴器与发电机间的阻尼系数;K1为原动机的联轴器间的弹性系数;K2为联轴器与发电机间的弹性系数;TT为原动机转矩;TG为发电机转矩.
1.3 负载模型
船舶电力系统负载包含各种设备,如照明灯、制冷空调、电热器、压缩机、变压器、感应电动机和同步电动机等,因此负荷模型的建立相当复杂.一般将负荷模型分为两大类:静态负荷模型和动态负荷模型.
对于静态负荷模型,任意瞬时的负荷特性是该瞬时母线电压幅值和频率的代数函数.分别考虑静态负荷模型的有功和无功功率分量.对于动态负荷模型,电动机消耗的能量占电力系统总能量的70%~80%,电动机的动态特性常常是系统负荷动态特性的最重要方面.因此,在船舶电力系统建模研究中单独考虑电动机负载.[14-15]
1.4 感应电动机负载模型
感应电动机驱动的负载是船舶电力系统中的主要负载之一,这类负载所占比例很大,其动态特性严重影响电力系统的暂态过程.感应电动机的数学模型也有多种形式,本文仿真建模所用模型是依赖于频率的动态模型,文献[1]给出其数学模型.
1.5 船舶电力系统总体模型
综合以上建模分析,针对某大型全电远洋运输船舶建立船舶电力系统模型结构,见图3.该模型由发电机组、电网与配电屏、动态感应电动机负载及静态负载构成.发电机的输出转速反馈至柴油原动机的调速器.
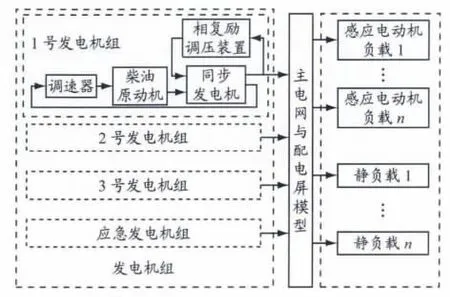
图3 船舶电力系统模型结构
依据图3在MATLAB/SIMULINK SimpowerSystems环境下建立船舶电力系统仿真平台.该平台考虑船舶电力系统各子系统的特性,特别是发电机和推进器的动态负载特性,还考虑发电机与柴油机轴传动之间的动态特性.此仿真平台中有3台主船舶柴油发电机组和1台应急柴油发电机组,每台发电机组由同步发电机模块、柴油机和控制系统模块构成.船用同步发电机电气参数及标准参数:Pn=3.125×106W,Vn=2400 V,fn=60 Hz;Rs=0.0036(pu),p=4;Xd=1.56(pu),Xd'=0.296(pu),Xd″=0.177(pu),Xq=1.06(pu),Xq'=0,Xq″=0.177(pu);Xl=0.052(pu),Td'=3.7 s,Td″=0.05 s,Tq″=0.05 s.船舶侧推器由感应电机通过蜗轮蜗杆机构驱动,感应电动机电气参数及标准参数:Pn=2200 kW,Vn=3000 V,fn=60 Hz;Rs=0.029 Ω,LIs=0.6 × 10-3H;Rr'=0.022 Ω,LIr=0.6 ×10-3H,Lm=34.6 ×10-3H.船用主推进器由感应电机驱动,电动机电气参数及标准参数:Pn=4 MW,Vn=2400 V,fn=60 Hz;Rs=0.00859 Ω,LIs=0.5178 × 10-3H;Rr'=0.00709 Ω,LIr=0.3753 ×10-3H,Lm=10.822 ×10-3H.
2 主推进器输入电缆3相短路故障仿真
大功率主推进器输入电缆3相短路故障仿真如下:3台发电机组并网稳定运行10.1 s,主推进器在10.1 s时启动,主推进器在10.2 ~10.5 s发生输入电缆3相短路故障,10.4 s时因短路电流过大,3台发电机组的主开关跳闸,停止对电网供电.
主推进器输入电缆3相短路故障时主推进器转速、定子电流变化曲线见图4.
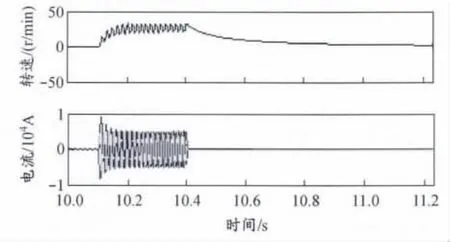
图4 主推进器输入电缆3相短路故障时主推进器转速、定子电流变化曲线
由图4可见,主推进器在10.1 s时启动加速,10.2 s时发生3相短路故障,启动电流大幅减少,转速开始下降;3台发电机组10.4 s时全部跳闸;此后主推进器定子电流变为0,转速在10.6 s时下降至10 r/min,随着时间的推移转速继续下降,最终在11.2 s时变为0.
主推进器输入电缆3相短路故障时,3台发电机组端电压及母线电压变化曲线见图5.
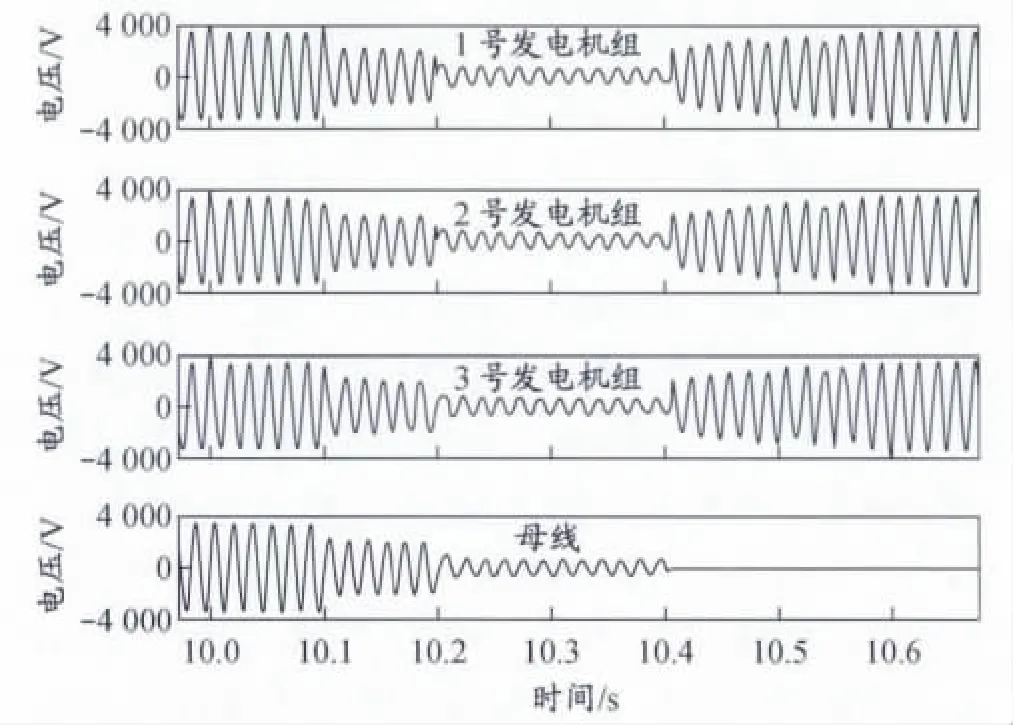
图5 主推进器输入电缆3相短路故障时3台发电机组端电压及母线电压变化曲线
由图5可以看出:10.1 s时大功率主推进器的启动使得3台发电机组端电压及母线电压减小到额定电压的58%,这是由该电力系统仿真平台中4 MW的静态负载所致;10.1~10.2 s因主推进器启动,电压一开始下降较为厉害,随后有小幅增加;10.2 s时因主推进器输入电缆发生3相短路故障,3台发电机组端电压及母线电压进一步减小;因短路电流太大,10.4 s时3台发电机组全部跳闸,此后3台发电机组端电压开始逐步恢复到额定值,而母线电压则变为0.
主推进器输入电缆3相短路故障时,3台发电机组及母线的a相电流变化曲线见图6.
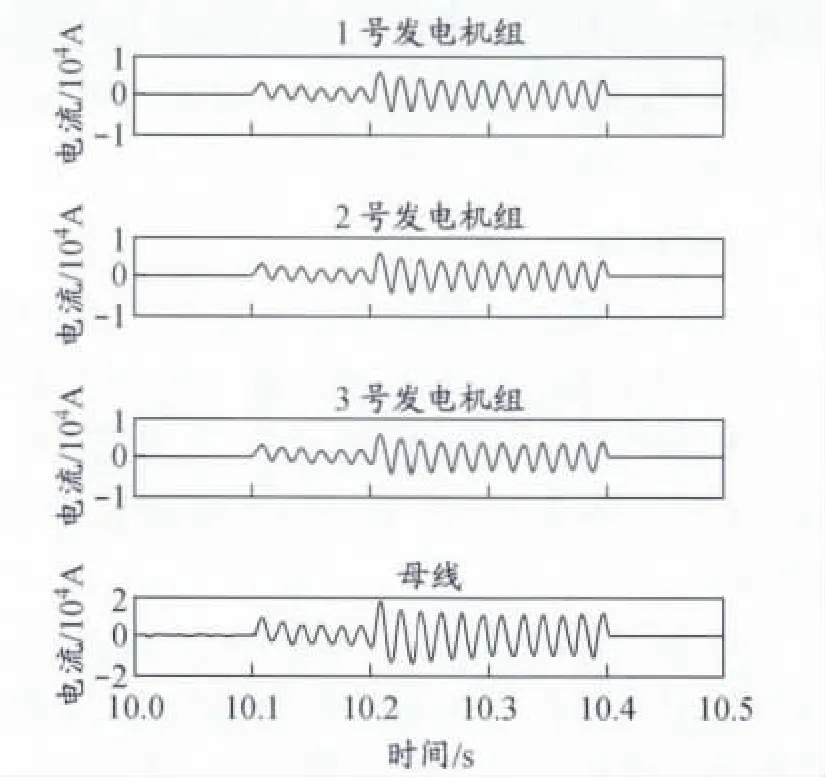
图6 主推进器输入电缆3相短路故障时3台发电机组及母线的a相电流变化曲线
从图6可以发现:10.1 s时因主推进器启动,3台发电机组及母线的a相电流都增加;10.2 s时因主推进器发生3相短路故障,3台发电机组及母线的a相电流进一步增加;因短路电流太大,10.4 s时3台发电机组的主开关跳闸,此后3台发电机组及母线的a相电流全部变为0.
主推进器输入电缆3相短路故障时,3台发电机组转矩功率、励磁电压、端电压、转速和励磁电流曲线见图7.仿真记录的1,2,3号发电机组的柴油机输出功率Pmec,转速、励磁系统反馈电压Vf,端电压Vt,励磁电流ifd都使用标幺值 (pu).

从图7可以看出:10.1 s时因主推进器的启动,3台发电机组输入的Pmec开始增加,Vf上升到饱和值,转速有少量跌落,ifd有所增加;10.2~10.5 s因主推进器输入电缆3相短路故障,3台发电机组输入的Pmec进一步增加至1后波动衰减,Vf保持在饱和值6,转速跌落至98%,ifd增加到饱和值6;10.4 s因短路电流过大,3台发电机组的主开关跳闸,3台发电机组输入的Pmec继续波动并减小为0,Vf保持在饱和值6,转速开始逐步回升到额定值1,ifd开始逐步减小到额定值1.可以看出,3台参数相同的发电机组在主推进器输入电缆3相短路故障发生的整个过程中动态变化趋势基本一样.
3 结束语
根据全电力推进船舶电力系统的数学模型,利用MATLAB/SIMULINK SimpowerSystems建立其动态数字仿真平台,依托此仿真平台对船舶电力系统进行主推进器输入电缆3相短路故障仿真.该数字仿真平台可以对船舶电力系统故障进行有效动态及稳态仿真模拟,为船舶电力系统的设计、测试和故障试验提供一种有效且经济的手段.
[1]施伟锋,许晓彦.船舶电力系统建模与控制[M].北京:电子工业出版社,2012:23-25.
[2]汤天浩.新能源与电力电子在船舶电力推进中的发展和应用[J].上海海运学院学报,2004,25(1):19-24.
[3]马伟明.舰船动力发展的方向——综合电力系统[J].上海海运学院学报,2004,25(1):1-11.
[4]王淼,戴剑锋,周双喜,等.全电力推进船舶电力系统的数字仿真[J].电工技术学报,2006,21(4):62-67.
[5]DIAMANTIS G,PROUSALIDIS J M.Simulation of a ship propulsion system with DTC driving scheme[C]//Power Electronics,Machines and Drives.Second Int Conf,2004,2:562-567.
[6]ARENDT R.Simulation investigations of ship power systems[C]//Environment and Electrical Engineering.201110th Int Conf,2011:1-4.
[7]陆金铭.船舶推进装置的MATLAB仿真[J].船舶工程,2002(5):38-40.
[8]夏永明.船舶电站多种发电方式的联合运行仿真系统分布式结构的实现[J].上海海事大学学报,2005,26(4):26-32.
[9]谢卫,张霞,王亚静,等.船用多相无刷直流推进电动机的系统建模与仿真[J].上海海事大学学报,2006,27(1):1-4.
[10]沈爱弟,褚建新,康伟.内河船舶电力推进系统设计[J].上海海事大学学报,2009,30(2):20-24.
[11]刘崇,沈爱弟,康伟.船舶电力推进试验平台设计[J].上海海事大学学报,2011,32(2):52-55.
[12]刘昭,高迪驹.异步电动机的交流传动试验平台[J].上海海事大学学报,2010,31(2):40-44.
[13]KRAUSE P C.Analysis of electric machinery:Section 12.5[M].McGraw-Hill,1986:21-24.
[14]施伟锋.关于船舶电力系统研究的一些探索——系统建模、混沌分析与神经控制[D].上海:上海海事大学,2005.
[15]王振滨,牛立,杜宝江.船舶电力推进系统仿真与试验平台[J].系统仿真学报,2008,20(9):2316-2322.
