基于自适应背景匹配的运动目标检测算法
2013-09-11高振华张洪斌于艳飞
高振华,黄 山,,张洪斌,于艳飞
(1.四川大学 电气信息学院,四川 成都610065;2.四川大学 计算机学院,四川 成都610065;3.中国北车集团大连机车研究所有限公司 技术中心,辽宁 大连116021)
0 引 言
对不依赖先验知识的目标跟踪而言,运动目标检测是实现目标跟踪的第一步,是整个后继处理的基础,它的的精确检测关系到整个视频监控系统检测精度和可靠性。目前常用的运动检测方法大致有3种:光流法、帧差法和背景差分法。光流法[1]通过对目标光流场的估算来分割运动目标,虽能检测事先未知信息的运动目标,但是计算过程复杂、计算量大,难以满足现实中的实时要求;帧差法[2]将不同时刻两帧图像的对应像素值相减,原理简单、运算量小,但无法检测静止的前景目标,且最佳帧间间隙随目标运动快慢而变化;背景差分法[3]通过当前帧与场景背景之差提取前景物体,是目前在运动目标检测中运用最多也是最有效的方法。背景差分法的关键在于如何提取可靠的背景以及进行鲁棒的实时的更新。
我们针对自适应背景图像提取和前景运动目标检测进行了深入研究。首先用改进的Mode[4]算法提取出了可靠的初始背景,然后结合背景匹配更新机制对背景进行自适应的更新。对于运动目标检测这一模块,我们采用Cauchy[5]模型针对视频序列进行目标检测。最后针对行人和交通场景进行了多组实验对比和分析,最终验证了算法的有效性同时也提高了算法的实用性。
1 背景提取与自适应更新算法
目前主要的背景图像获取方法[6]大致有4种:背景统计法、Surendra背景更新算法、卡尔曼滤波法以及背景模型法。这些方法各具特点,在实际应用中取得了一定的成效。在现实中,视频监控大多动态场景的变化对背景的影响比较大,在监控过程中不仅需要可靠的背景,而且还要求能及时的更新背景,以适应环境的突变和渐变。采用取前几十帧的平均灰度值作为初始背景,引入了大量的噪声,会影响运动目标的准确检测;而单一的混合高斯模型法[7,8]计算量较大并且会出现运动物体长期静止时失效。因此在深入分析和研究各类运动目检测和背景提取方法后,本文在初始背景提取部分,采用了Mode算法,并且对算法进行了有效的改进;在背景更新阶段使用鲁棒性和自适应能力强的背景更新算法以期达到提高运动目标检测结果的准确性的目的。
1.1 算法及其改进
1.1.1 算法
在提取背景图像的过程中有一个合理的假设,即在几十帧图像的时间段内,实际背景的灰度值基本上在很小的范围内波动,而不同的前景目标遮挡背景引入的灰度值干扰则随运动目标的反光特性差异和移动而表现为出随机分布在整个灰度值的范围内[9]。Mode算法基于这个假设,并且在此基础上,延时间轴统计每个像素点的灰度分布直方图,取得分布值最大的峰值点,即Mode值点,以它作为相应像素点的背景灰度值。
Mode算法在二维视频序列中的具体应用步骤如下:统计图片帧的每个像素点 (x,y)前N帧图像对应某点的灰度直方图为hist(x,y,0),hist(x,y,1)…,hist(x,y,255),将该序列的最大灰度值作为该对应像素点的当前背景灰度值,计算公式如下

在Mode算法中,先求出每个像素点 (x,y)的前N(N<100)帧图像的灰度Mode值。目的就是让实验所得结果更接近真实背景的灰度值。实验中发现N取100的时候就完全可以得到可靠的初始背景图,且提取的初始背景图像优于取前N帧均值提取的初始背景图像、计算算法复杂度也低于混合高斯模型法。
1.1.2 Mode算法的改进
在实际中,由于像素灰度值取值的连续性和实际中扰动的存在,且视频采集受到光流、天气、水面波动等的干扰,某点的背景灰度值不是某一确定的数值,而是围绕某个值分布在一个小的区域中,为了在使用Mode算法时求出更好的代表各点的背景灰度值,我们在计算灰度值直方图时,将灰度值分布轴划分成若干的小区间并进行二次分段累加统计。文献 [4]中的Mode算法实现时,固定选取灰度分布值最大的区间的中值作为Mode值,也即为背景的灰度值。这样的取值存在一定的缺陷。于是文献 [4]中对其进行了改进,把灰度区间的中值改取成灰度区间的平均值。这样的取值方法,没考虑区间内数值的权重问题,权重小的数值对背景灰度值的影响比较小。同时,对于分区段存在一个不可避免的问题,即若Mode值恰好处于相临两个区段的边界上。基于此,我们中对该算法做了进一步改进:我们采用了两个跨度单位一起排序然后取前几个最大值,有效地回避了跨区段的问题;对于相邻两区间内的数值,按权重从大到小的排序,保留排在前面的几个数值,舍去其余,然后取这几个数的均值。
我们在实验中采取的区间长度以4为跨度单位,在256个灰度级上取了64个区间。在实验中发现,一般需要取到两个相邻区间内前5个最大的数,就可以得到准确的Mode值,同时考虑到位图数据的类型,我们对计算出来的Mode值进行了四舍五入处理。为了验证改进的Mode算法较文献 [4]有效,在实验过程中特别针对位图中 (30,60)点进行了对Mode算法改进前后的对比。
表1为像素点 (30,60)采用Mode算法在前100帧所取到的灰度值出现的频数最大的两个区间0-3、4-7以及各个灰度值出现的频数。

表1 频数最大的两个区间及频数
表2为经过Mode算法计算出 (30,60)点的背景灰度值,考虑到像素点的数据类型,对计算结果进行四舍五入的处理,可以看出改进前的算法计算出的结果四舍五入后所得的数值为3,而改进后的算法四舍五入后所数值为2,与实际值是吻合的。

表2 改进前后Mode算法对比
1.2 自适应背景更新
通过Mode算法获取了可靠的初始背景。但是Mode算法的缺点是需要较大的存储空间,更主要是的考虑到背景更新的自适应性与鲁棒性的问题。因此针对背景进行自适应的更新这个问题,我们采用了背景匹配更新机制。在通过Mode算法得到初始背景后,分别赋给参考帧R0(x,y)和当前背景模型B0(x,y),然后采用背景匹配更新机制,这种机制不仅可以消除很大一部分噪声的影响,也可以自适应地更新背景。在通过每一输入帧提供的信息来实时调整背景图像,使所得到的背景图像更加接近真实背景。
背景匹配更新机制具体内容包括3大部分:参考帧的更新、匹配过程、背景的修正更新。背景匹配更新流程图,如图1所示。

图1 背景匹配更新流程
(1)参考帧Rt(x,y)是当前背景模型的一个屏蔽过滤机制,这样通过参考帧的缓冲,可以大幅的滤除实际中的由运动目标引入的对背景的干扰和噪声,过滤并提取出稳定的信息以更新背景。参考帧根据每一帧所提供的的像素值逐帧迭代计算参考帧每个像素点,其计算公式如下
Rt(x,y)= Rt-1(x,y)+sgn[It(x,y)-Rt-1(x,y)](2)式2中Rt(x,y)和Rt-1(x,y)分别是某一像素点 (x,y)的当前参考帧和前一时刻参考帧的灰度值,It(x,y)是当前输入帧像素点 (x,y)的灰度值。最初的R0(x,y)即由Mode算法采用了前100帧计算出的初始背景。
(2)匹配过程:每当有视频序列的一帧输入,针对其上的每一个像素点进行匹配标记。匹配过程伪代码如下:

It(x,y)为非匹配点,不予以考虑。
(3)背景模型的修正更新:在通过对输入帧的筛选得到匹配点之后,就可以对这些点更新当前背景模型,具体更新公式如下

式 (3)中Bt(x,y)和Bt-1(x,y)分别是当前时刻和前一时刻的背景模型,Rt(x,y)是匹配点的参考灰度值。
根据上述匹配和背景的修正更新过程,可以看到参考帧起到的作用主要有两点:①它是作为当前背景模型的一种屏蔽作用。对于前景运动目标经过时对背景的遮挡不会即可影响背景质量;②过滤机制。通过输入帧提供的稳定信息会逐渐逼近真实背景。参考帧会在逐渐逼近真实背景的过程中,通过匹配和背景修正的影响得到逐渐的修正。同时,基于参考帧的渐变作用,可以大幅降低和减小噪声对分割前景目标的影响。但是由于渐变作用,长时间停留的目标还是会逐渐刷新到背景图中,针对这种影响,对背景更新机制引入了长时间逗留物体的倒计时机制进行背景保持和刷新[6]。
2 基于Cauchy模型的运动目标检测
本文采用基于自适应的背景和前景与背景的Cauchy分布模型来进行运动目标的检测。在运动目标检测的过程中,利用了当前帧图像和背景图像的绝对差分和Cauchy分布这两个数学模型。
2.1 绝对差分和Cauchy分布
绝对差分是由所得到的背景模型Bt(x,y)与视频序列当前帧之间It(x,y)的差分绝对值得到。具体计算公式如下

为了对每一帧图像,通过差分图像检测到运动目标所属像素,引用了Cauchy分布模型。模型描述如下

式中:a——Cauchy模型的位置参数,γ——Cauchy模型的尺度参数。
2.2 运动目标检测
通过图像上各像素点提供的信息,得到各像素点绝对差分图像后,针对每一个像素点分别计算其前景和背景的Cauchy分布模型,然后加入可变系数对两Cauchy分布模型进行大小的比较,从而在绝对差分图像上得到准确的前景目标,实现对运动目标的检测。
在计算Cauchy模型前,需要统计绝对差分图像的灰度直方图。在一帧绝对差分图像上灰度值为i的点的个数用式 (6)表示

对背景区域的Cauchy分布模型c1定义为

式中:α——c1模型的位置参数,且由如下公式计算

式中:i——在绝对差分图像中的任意灰度级,gΔ(x,y,i)——对应i灰度级的像素数。
另外又定义了对运动目标分类的Cauchy分布模型c2

式中:β——c2模型的位置参数,且由如下公式计算

式中:i——绝对差分图像上的任意灰度级,imax——绝对差分图像上的最大灰度级,gΔ(x,y,i)——对应i灰度级的像素数。之后对一帧图像上的像素点进行背景点与前景点采用比对c1、c2的大小来判别,在实验中测试所得,当γ=30的时候实验结果最优。
我们对两个Cauchy分布模型c1、c2大小的判别增加了一个可变系数ε。同时由于是c1、c2之间的大小比对,取消了它们共同的公因子1/π,减少计算冗余。改进后的算法对某一像素点的两Cauchy分布模型c1、c2对该点的归宿判定如下:若c1>εc2像素点 (x,y)为背景点;否则像素点 (x,y)为前景运动目标点。我们针对不同的对象进行了大量的跟踪实验,实验结果显示不同的场景,ε取值不同。在行人场景中ε=1.1,在交通车辆场景中ε=1.2的情况下获得置信度高的实验结果。
在实际运行过程中,会出现某一帧图像没有前景目标。这时公式 (10)出现了分母为零的情况,以至前景Cauchy模型无法计算。这种情况下,在实验中,先计算β的值,若是其分母值为零,则直接跳过这一帧图像,不予处理,继续计算下一帧图像中的运动目标。
在此处对像素点的归宿判定采用了两个拥有动态参数α、β的Cauchy分布模型c1、c2,针对每一帧实时图像,都计算了α、β,实现了二者的动态更新,而非直接用传统的单阈值来判定,避免了采用经验值的弊端。
3 实验结果与分析
我们主要针对交通车辆监控和校园行人场景监控进行了多组初始背景提取、背景更新和前景点分类实验。整个监控系统程序在VS2010环境下编写,硬件采用安装了天敏SDK4000采 集 卡 的 PC 机 (Inter (R)Core (TM)i3-2330M,2.2GHz,4G内存),对PAL制灰度视频进行25fps的采集分析。视频图像的大小为320×240。
图2为100帧时所获得的背景。其中左图中为取前100帧图像的平均值所得初始背景;右图为采用Mode算法在100时初始背景。从图2中可看出在帧数同为100时,取多帧平均所获得初始背景模糊且有噪声,而Mode算法所获得的背景比较准确。
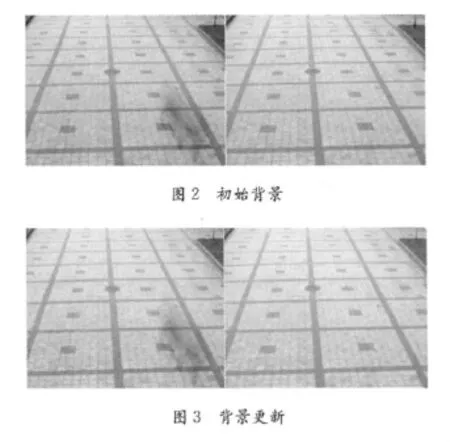
图3为1000帧的时候,提取的背景图像。其中左图为取多帧平均初始背景采用本文的背景更新机制实时更新所得背景,右图为采用Mode初始背景采用本文的背景更新机制实时更新所得背景;通过实验可以得出Mode法无噪声,而取多帧平均法虽然采用了本文的背景匹配更新机制,其实验结果质量较差,背景仍然模糊,伴有有大量噪声。
图4为行人检测实验抽取的图像。其中左图对应为第350帧图像,右图对应为第378帧图像。图像第一行为原始行人图像;第二行为采用混合高斯法检测到的运动目标图;第三行为采用取多帧平均法提取初始背景之后检测到的运动目标图;第四行为采用Mode法提取初始背景之后检测到的运动目标图。通过实验可以得出混合高斯法有大量噪声,取多帧平均法初始化背景也有大量噪声,Mode算法无噪声。

图4 行人检测
图5为成都市黄石桥路段的交通场景,该场景中左侧初始有一行人停留。其中左图对应为第1500帧图像,右图对应为第2940帧图像。图像第一行为原始交通场景图像;第二行为采用混合高斯法检测到的运动目标图;第三行为采用取多帧平均法提取初始背景之后检测到的运动目标图;第四行为采用Mode法提取初始背景之后检测到的运动目标图。根据实验可以看出混合高斯模型需要根据环境进行人为的调整设计阈值,该阈值对实验结果影响比较大且噪声较大,但初始背景中有停留目标时,比本文的背景匹配更新机制更新速度快;取多帧平均获得的初始背景会引入大量噪声;而改进Mode算法提取的初始背景较为精确,对初始停留目标的处理较慢,但实验证明在检测过程中的慢目标也有很好的实时性和噪声抑制效果。

图5 车辆检测
4 结束语
在摄像机静止且在检测过程中有慢目标出现的情况下,在初始背景提取阶段,我们采用改进的Mode算法提取初始背景较文献 [5]中的取多帧平均提取初始背景,噪声小、鲁棒性好、后续更新背景使用时间短;在目标检测阶段,与混合高斯模型法比较,我们采用的Cauchy条件分布模型具有计算复杂度低,目标检测准确的优点。改进后的算法能同时满足各种场景的应用要求,实现了对行人的精确检测与交通的准确监控,实用价值明显。接下来,将在对具体应用场景的深入分析基础上,进一步提升目标检测算法的适应性和高效性,结合场景特点和目标状态等信息,并且把去除阴影、目标跟踪和遮挡下的监控和动态阈值的优化作为下一步研究的重点。
[1]ZHANG Jieyu,John L Barron.Optical flow at occlusion[C]//Toronto,Canada:Ninth Conference on Computer and Robot Vision,2012:198-205.
[2]WAN Ying,HAN Yi,LU Hanqing.The methods for moving object detection [J].Computer Simulation,2006,23 (10):221-226(in Chinese).[万缨,韩毅,卢汉清.运动目标检测算法的探讨 [J].计算机仿真,2006,23 (10):221-226.]
[3]ZHANG Juan,MAO Xiaobo,CHEN Tiejun.Survey of moving object tracking algorithm [J].Application Research of Computers,2009,26 (12):4407-4410 (in Chinese). [张娟,毛晓波,陈铁军.运动目标算法研究综述 [J].计算机应用研究,2009,26 (12):4407-4410.]
[4]ZENG Yan,YU Lian.A new background subtraction method for on-road traffic [J].Journal of Image and Graphics,2008,13 (3):593-599 (in Chinese).[曾艳,于濂.一种新的道路交通背景提取算法及研究 [J].中国图形图像学报,2008,13 (3):593-599.]
[5]Cheng Fan-chieh,RUAN Shang Jang.Accurate motion detection using a self-adaptive background matching framework [J].IEEE Transations on Intelligent Transportation Systems,2012,13 (2):671-679.
[6]ZHANG Hongbin,HUANG Shan.Comprehensive dynamic background updating method for real-time traffic visual surveillance [J].Journal of Computer Applications,2007,27 (9):2134-2136 (in Chinese).[张洪斌,黄山.面向实时交通视觉监控的综合动态背景更新方法 [J].计算机应用,2007,27(9):2134-2136.]
[7]JIAO Bo,YAN Liaoliao,LI Wei.Fast convergent gaussian mixture model in moving objects detection [C]//Shanghai,China:IEEE International Conference on Computer Science and Automation Engineering,2011:422-425.
[8]LIU Xin,LIU Hui,QIANG Zhenping,et al.Adaptive background modeling based on mixture gaussian model and frame subtraction [J].Journal of Image and Graphics,2008,13(4):729-734 (in Chinese). [刘鑫,刘辉,强振平,等.混合高斯模型和帧间差分相融合的自适应背景模型 [J].中国图形图像学报,2008,13 (4):729-734.]
[9]QI Meibin,WANG Qian,JIANG Jianguo,et al.A background reconstruction algorithm based on the hypothesis of background pixel with maximum probability [J].Journal of Image and Graphics,2008,13 (4):723-728 (in Chinese). [齐美彬,王倩,蒋建国.基于背景像素值频次最高假设的背景重构算法 [J].中国图象图形学报,2008,13 (4):723-728.]
[10]XIE Fengying,ZHAO Danpei.Digital image processing [M].Beijing:Publishing House of Electronics Industry,2008 (in Chinese). [谢凤英,赵丹培.Visual C++数字图像处理[M].北京:电子工业出版社,2008.]
[11]Chen Y T,Chen C S,Hang C R,et al.Efficient hierarchical method for background subtraction [J].Pattern Recognition,2007,40 (10):2706-2715.
