变速超空泡航行体壳结构的动力响应分析
2013-09-09李魁彬王安稳
李魁彬,王安稳,邓 磊
(海军工程大学 理学院,武汉 430033)
超空泡水下航行体,由于绝大部分表面被空泡包裹,极大地减小了其表面所受水的摩擦阻力。研究表明:空泡数为0.01,速度为100 m/s时阻力可以减小到全湿状态的5%,空泡数为0.000 1时阻力可以减小到0.1%[1]。超空泡技术作为水下航行体减阻的一种革命性的新途径,受到人们越来越广泛的重视[2-4]。
目前,国内外对超空泡航行体结构动力学研究还比较少[5-12]。杨传武[8-11]分别研究了动态轴向载荷和匀速条件下冲击载荷壳结构的振动特性;张劲生等[12]分析了不同离散匀速情况下航行体结构的响应特性。二者只是分析了匀速条件下的情况,在处理冲击力时,均假设冲击力和航行体尾部入水深度成正比,因为考虑航行体做轴向匀速运动和垂面内的小角度摆动,动量矩方程均以航行体端部空化器为转动中心,同时忽略了轴向速度和横向速度及角速度之间的联系,具有一定的局限性和误差。根据Savchenko[13]提出的超空泡航行体水中运动的四种稳定模式,当速度为300~900 m/s时,航行体上下周期性振荡可能稳定在一个振幅上或逐步衰减。超空泡航行体除匀速巡航外,变速运动也是一种重要的运动状态;由于在不同速度下,航行体的受力和结构响应特性都有明显的不同;另外,航行体的结构响应特性也是其优化设计的一个重要方面。因而,研究尾拍稳定模式下变速超空泡航行体壳结构的振动特性有着非常重要的意义。
1 航行体受力模型
超空泡航行体作平面运动,主要作用力有:流体阻力FD,推力FP,冲击力FI和表面压力p,受力模型如图1所示。
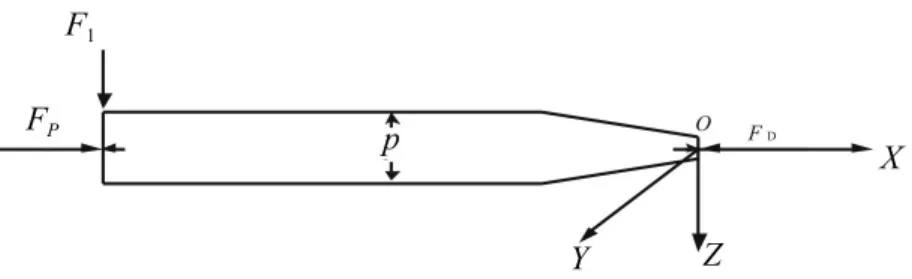
图1 航行体受力图Fig.1 Forces applied to the supercavitating vehicle
2 载荷的确定
2.1 表面压力
大气压力p0,水的饱和蒸汽压力pcr,自然超空泡条件下,考虑航行体壳结构内外环境,内部压力为p0,外部受压力为pcr。航行体表面压力为:

2.2 推力和阻力
目前一般认为超空泡航行体采用火箭喷射器推进,本文研究推力FP为恒力的情况。
小角度摆动,阻力近似为[5,12]:

其中,ρ为流体密度,k为阻力系数0.82,Ac为圆盘空化器面积,U为航行体X方向航速。
2.3 尾拍冲击力
超空泡航行体在尾拍稳定模式下,根据受力不同,主要存在航行体尾部是否与水发生撞击两种状态。如图1,以航行体端部空化器为原点,建立弹体坐标系,X轴与航行体轴线一致,前进方向为正方向,Z轴与X轴在航行体摆动平面内,垂直X轴向下,X、Y、Z轴满足右手法则。
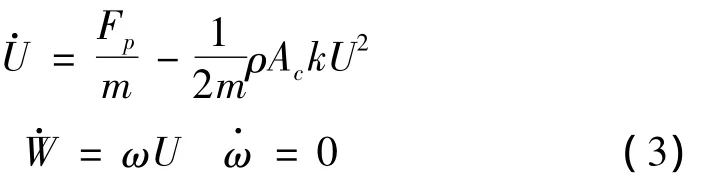
参照文献[14]并考虑推力作用,在弹体坐标系中建立航行体运动方程得:
尾部未与水撞击时
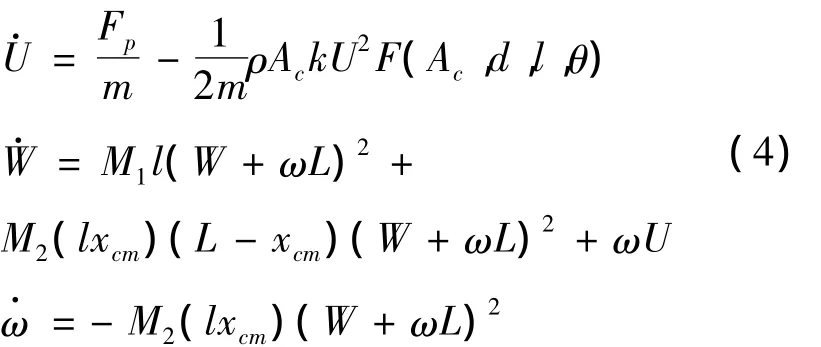
尾部与水撞击时,当ω较大时,考虑O(ω2l)和O(ωl)项

采用Logvinovich[15]的小空化数情况下超空泡尺寸公式。

尾拍冲击力计算公式为:

联立(3)~(6)式,可以求得随时间不断变化的尾拍冲击力。
3 数值计算
参照文献[7]的部分数据,航行体材料为铝,前部为平头圆锥壳,后端为圆柱壳,考虑高速超空泡航行体对结构强度较高的要求,适当调整了壳和封板的厚度。超空泡航行体在恒定推力FP作用下做轴向初速为400 m/s的减速运动,壳结构模型及其初始和环境参数如表1所示,并用航行体柱壳部分的非结构附加质量50.59 kg/m2模拟航行体有效载荷[7]。

表1 模型参数Tab.1 Parameters of the model
为分析航行体在恒定轴向推力下和一定初始速度时的变加速和变减速情况,并与匀速情况进行比较,取参数如表2所示四种情况。考虑变速时间较短,计算时间t=0.8 s,根据运动方程得航行体冲击力和空化器阻力如图2所示。
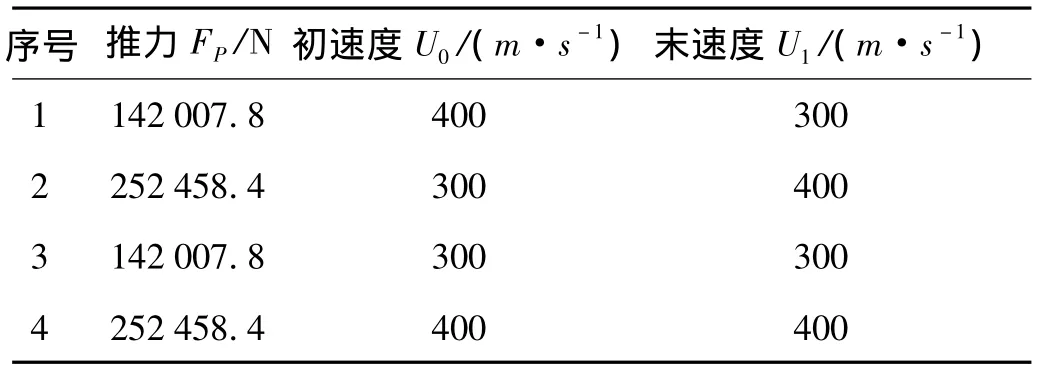
表2 推力和速度Tab.2 Axial thrust and velocity

图2 航行体所受的尾拍冲击力和空化器阻力Fig.2 Impact and drag forces applied to the vehicle
航行体壳结构所受的表面压力相对尾拍冲击力、推力和阻力很小,可以忽略。航行体近似认为两端自由。航行体有限元模型及典型节点分布如图3所示,参照激振力的频率和结构固有频率合理选择时间步长,进行瞬态动力响应计算。

图3 航行体有限元模型及典型节点分布Fig.3 Finite element model and typical nodes
考虑航行体尾部下端的冲击力较大,分析了航行体轴线所在的垂面与壳结构下表面相交处各节点在时域上的最大应力,结果如图4所示(首尾端节点取自封板面上的单元)。所受应力达到了108Pa,高速超空泡航行体壳结构对结构强度要求很高;四种运动情况下,节点时域内的最大应力在空域上的极大值分布趋势具有一致性,主要在首尾端部和柱壳中部。

图4 航行体下侧节点的最大应力Fig.4 maximal stresses of nodes on the vehicle undersurface
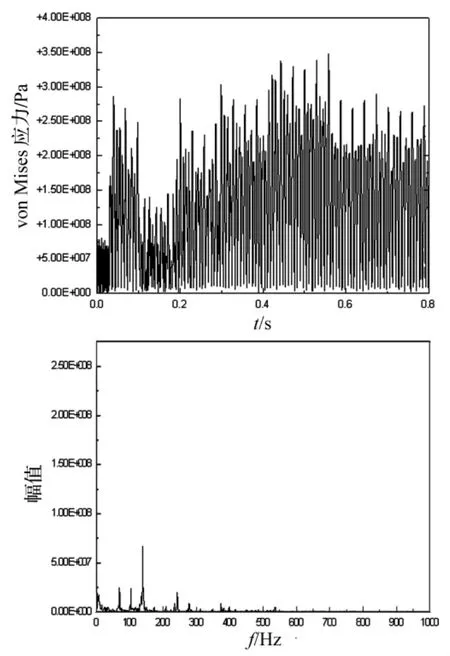
图5 减速柱壳中部节点303的应力曲线及其傅里叶变换结果Fig.5 Stress curve of the node 303 in the middle of the cylindrical shell in retarded motion and the result of FFT
研究了典型节点的应力响应,并进行傅里叶变换,图5、6分别为减速、加速过程节点303在时域及频域上的应力曲线。分析发现,四种运动状态中航行体在动态轴向载荷和冲击载荷共同作用下对结构响应影响显著的振动频率有近似共同点:70 Hz、103 Hz、139 Hz、173 Hz、243 Hz、304 Hz、347 Hz。航行体前三阶弯曲模态固有频率为:70 Hz、174 Hz、308 Hz;分析航行体在上述航速下单独受冲击力作用,可得应力较大时的频率值:103 Hz、139 Hz、243 Hz、345 Hz。可以看出,弯曲模态固有频率和航行体仅受冲击力作用时对结构响应影响较大的振动频率近似构成了航行体在轴向冲击联合载荷下对响应影响显著的振动频率。这些频率对航行体航速和结构的设计以及内部仪器的选择布置具有一定的指导意义。
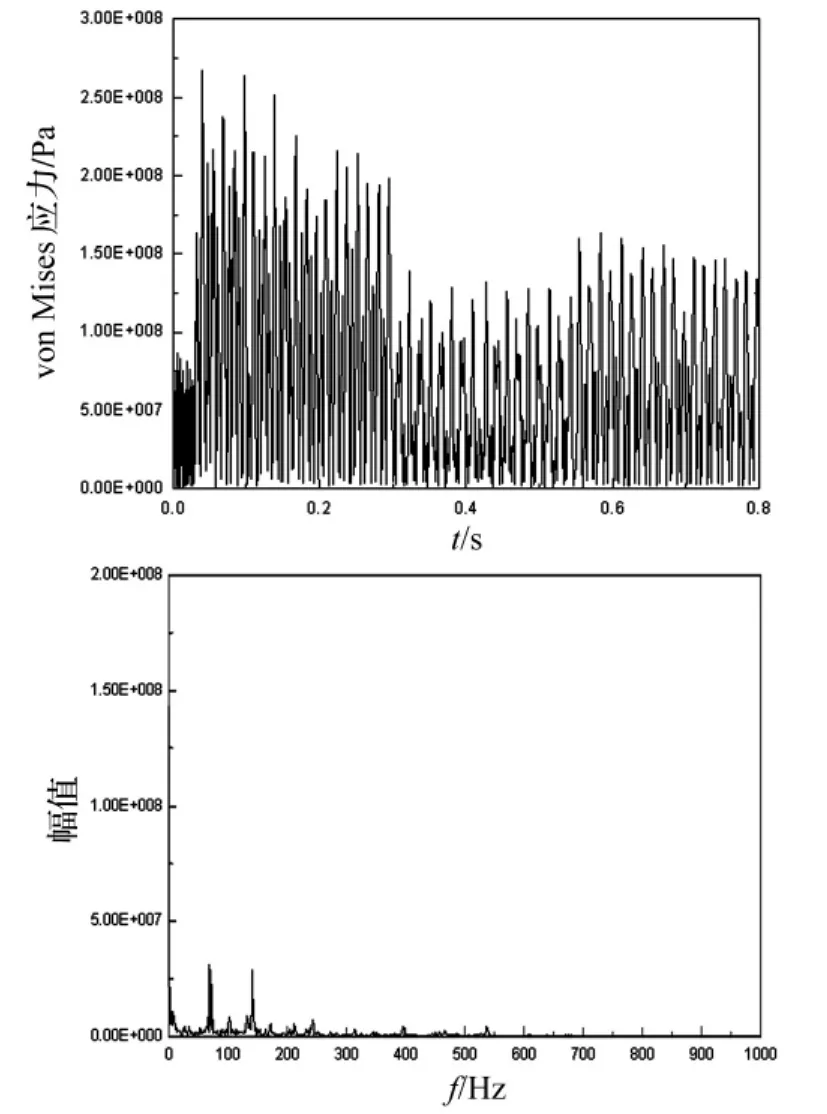
图6 加速柱壳中部节点303的应力曲线及其傅里叶变换结果Fig.6 Stress curve of the node 303 in the middle of the cylindrical shell in accelerated motion and the result of FFT
4 结论
通过对变速超空泡水下壳结构受力模型的分析,建立了恒定推力下航行体的运动方程,确定了变速过程中阻力和冲击力。利用有限元方法,进行了结构响应的定量计算,研究了时域上的最大应力值在航行体表面空间域上的分布情况及典型节点处的响应。结果表明:
(1)高速航行体由于其所需推进力和所受应力较大,对其结构强度要求较高。
(2)运动过程中,航行体首尾端和柱壳中部附近节点所受的最大应力较大。
(3)在联合动态载荷下,对响应影响较大的频率与航行体弯曲模态固有频率及仅受冲击力时的振动频率密切相关,在航行体设计和内部仪器选择时需要考虑这些频率。
[1]Savchenko Y N.Supercavitation-problems and perspectives[C] //CAV2001:4th International Symposium on Cavitation.California:California Institute of Technology,2001.
[2]黄加强.超空泡技术及其在潜艇上应用前景分析[J].舰船电子工程,2009,29(11):23-25.
HUANG Jia-qiang.Supercavitation technology and analysis of application perspective on submarine[J].Ship Electronic Engineering,2009,29(11):23-25.
[3]杨 莉,张庆明.超空泡技术的应用现状和发展趋势[J].战术导弹技术,2006,(5):6-10.
YANG Li,ZHANG Qing-ming.Current application and perspectives on supercavitation technology research[J].Tactical Missile Technology,2006,(5):6-10.
[4]曹 伟,魏英杰,王 聪,等.超空泡技术现状、问题与应用[J].力学进展,2006,36(4):571-579.
CAO Wei,WEI Ying-jie,WANG Cong,et al.Current status,problems and applications of supercavitation technology[J].Advances in Mechanics,2006,36(4):571-579.
[5]Ruzzene M,Soranna F.Impact dynamics of elastic stiffened supercavitating underwater vehicles[J].Journal of Vibration and Control,2004,10:243-267.
[6]Ruzzene M.Non-axisymmetric buckling of stiffened supercavitating shells:static and dynamic analysis[J].Computers&Structures,2004,82(2):257-269.
[7] Alyanak E,Venkayya V,Grandhi R,et al.Structural response and optimization of a supercavitating torpedo[J].Finite Elements in Analysis and Design,2005,41(6),563-582.
[8]杨传武,刘 刚,王安稳.超空泡体结构响应问题的有限元分析[J].海军工程大学学报,2008,20(2):101-104.
YANG Chuan-wu,LIU Gang,WANG An-wen.FEM analysis of structural response of supercavitating bodies[J].Journal of Naval University of Engineering,2008,20(2):101-104.
[9]杨传武,王安稳.冲击载荷作用下超空泡水下航行体的结构响应[J].华中科技大学学报,2008,36(7):129-132.
YANG Chuan-wu,WANG An-wen.Structural response of supercavitating underwater vehicles subjected to impact loads[J].Huazhong Univ.of Sci.& Tech.,2008,36(7):129-132.
[10]杨传武,王安稳.超空泡水下航行体振动特性分析[J].海军工程大学学报,2008,20(4):30-32.
YANG Chuan-wu,WANG An-wen.Vibration of supercavitating underwater vehicles[J].Journal of Naval University of Engineering,2008,20(4):30-32.
[11]杨传武,王安稳.动态轴向载荷对超空泡航行体振动特性的影响[J].华中科技大学学报,2008,36(12):71-74.
YANG Chuan-wu,WANG An-wen.Influence of dynamic axial loads on the vibration characteristics of supercavitation underwater vehicle[J].J.Huazhong Univ.of Sci.& Tech.,2008,36(12):71-74.
[12]张劲生,张嘉钟,魏英杰,等.超空泡水下航行体的结构动力响应特性[J].北京航空航天大学学报,2010,36(4):411-414.
ZHANG Jin-sheng,ZHANG Jia-zhong,WEI Ying-jie,et al.Structural dynamic response characteristics of supercavitating underwater vehicles[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(4):411-414.
[13] Savchenko Y N.Investigation of high-speed supercavitating underwater motion of bodies[C]//Proceedings of NATOAGARD,Ukraine:NAS-IHM,1997.20-1,12.
[14] Kulkarni S S,Pratap R.Studies on the dynamics of a supercavitating projectile[J].Applied Mathematical Modeling,2000,24:113-129.
[15]Logvinovich G V.Hydrodynamics of flow with free boundaries[M].Kiev,Naukova Dumka,1969.
