防碰技术在金县1-1-A平台的应用
2013-09-07孙晓飞韩雪银和鹏飞丁晓洁
孙晓飞 韩雪银 和鹏飞 丁晓洁
(中海油能源发展监督监理技术分公司,天津 300452)
防碰技术在金县1-1-A平台的应用
孙晓飞 韩雪银 和鹏飞 丁晓洁
(中海油能源发展监督监理技术分公司,天津 300452)
金县1-1-A平台开发井作业中,在平台槽口有限、开发区域集中、断层众多轨迹受限、滚动开发地质认识不断更新、靶点频繁调整的背景下,充分考虑油田区块内上部地层极软不易造斜、馆陶底砾岩井段滑动困难、隔水导管锤入偏斜等因素,统筹设计定向井轨迹、增加控制点、优化单井轨迹结构,通过应用表层预斜、防碰绕障、陀螺定向、表层直井段防斜打直等技术,配合优选钻具组合、优选钻井参数等措施,形成了一套完整的浅、深层防碰应对技术措施,成功完成金县1-1-A平台首批钻井任务,为油田的顺利开发打下较好的基础,对金县1-1-A平台后续丛式井的开发以及渤海油田的二次跨越均有着重要的借鉴意义。
丛式井;防碰技术;金县1-1-A平台; 辽东湾
金县1-1油田位于渤海辽东湾海域,处于郯庐断裂的走滑带上,构造的形成受走滑断裂控制,断层比较发育,主要呈北东向、北北东向以及近东西向展布,发育有21条主要断层,其中南区发育有11条主要断层。由此导致该油田开发过程中,钻井轨迹受地层构造因素影响较大,尤其是目的层位置以及断层分布严重限制了轨迹的布置范围。
1 金县1-1油田地质分层及岩性
平原组底垂深在海拔-372 m 左右,主要岩性为砂泥岩。明化镇组底垂深在海拔-754 m 左右,厚层含砾砂岩夹泥岩。馆陶组底垂深在海拔-1 120 m左右,上部为大套中砂岩、含砾中砂岩及砂砾岩夹泥岩,底部为泥岩与中砂岩、含砾中砂岩及砂砾岩呈不等厚互层。东营组底垂深在海拔-2 391 m 左右,主要岩性为泥砂岩互层。
2 工程设计及钻井作业难点
金县1-1油田A平台设计共40个槽口,为4×5+4×5结构,槽口间距为2.0 m×1.8 m,8个角上为单筒双井槽口,预留11个槽口,其中一期开发29口井,采用分井段批钻方式进行。主要存在以下难点。
(1)井网密集,设计布井29口,要同时考虑同井组、井间以及已钻探井之间防碰,技术要求高。
(2)开发目的层集中,靶点主要在平台西南方向,导致所有井都朝向同一方向,加重了防碰风险,尤其深层防碰问题突出,如图1为A平台各井垂直投影图。
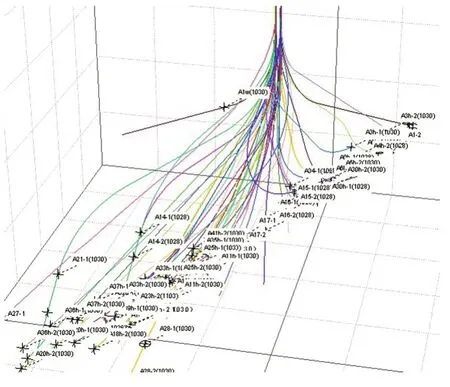
图1 JX1-1-A平台垂直剖面图
(3)由于隔水导管锤入时不能保证打直,钻井过程测量显示部分导管井斜大于0.5°,这对轨迹初期设计造成困难,加大了防碰难度。
(4)本区域上部地层疏松,不易造斜,同时超过一半的井设计为水平井,井段短,对整个井段造斜率要求高,着陆压力大,轨迹调整范围极其有限。
(5)施工中期,由于对地质情况的认识不断加深,地质部门频繁提出修改设计,相应轨迹设计做了调整,导致防碰问题更加突出。
3 钻井技术措施
3.1 表层作业(Ø444.5 mm井眼)
对于表层设计直井段井,若表层井斜超标,不但不利于定向造斜,而且容易造成防碰风险。A平台首批井中有24口设计表层为直井段,采用大钟摆钻具防斜打直[1],钻具组合:Ø444.5 mm钻头+X/O+Ø228.6 mm钻铤×2+Ø444.5 mm扶正器+X/O+Ø203.2 mm钻铤+Ø203.2 mm 浮阀接头+Ø203.2 mm随钻震击器+Ø127 mm加重钻杆×14;优化钻井参数,保持钻压小于 10 kN,排量 3 500~4 000 L/min,转速 60~70 r/min,确保表层直井段井斜小于1°,起钻时投测多点,结果表明大部分井斜在预计范围内,这为后续井眼轨迹优化及防碰工作打下了较好基础。
表层预斜是在定向井作业中为避免井眼碰撞而采取的有效措施[2],金县1-1-A平台进行了5口井表层预斜作业(如表1),钻具组合:Ø444.5 mm钻头+Ø244.5 mm钻井液马达+Ø425.45 mm扶正器+Ø203.2 mm浮阀接头+Ø203.2 mm非磁钻铤+203.2 mm MWD+Ø203.2 mm非磁钻铤+Ø203.2 mm定向接头+Ø203.2 mm 随钻震击器 +X/O+Ø127 mm加重钻杆×14。定向接头用陀螺(GYRO)测斜仪器确定马达的工具面,以便进行精准的初始定向作业。随钻测斜仪(MWD)可以及时判断钻头所在位置有无磁干扰。如果无磁干扰,此时磁场强度Bt在正常范围值,表明与邻井距离相对比较安全[3]。也可结合定向井工程软件Landmark及时防碰扫描。一般在表层作业时,由于丛式井表层集中,邻井磁干扰比较强烈,有时根本就无法显示出工具面。而陀螺(GYRO)定向时显示的工具面因不受磁干扰的影响是准确的,跟磁场强度、邻井套管等磁干扰源无关。因此,利用陀螺定向给出准确的造斜方位是预斜作业中的重要步骤。
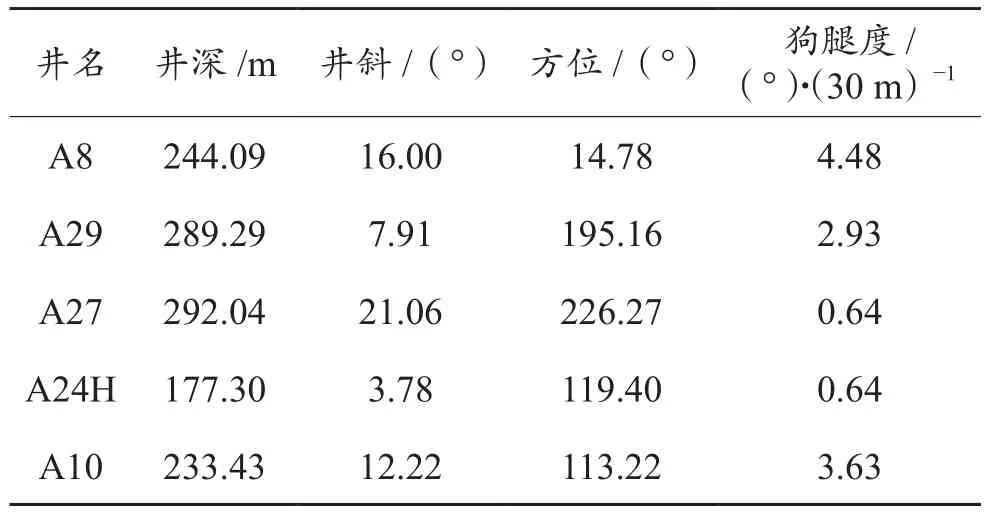
表1 金县1-1-A平台表层预斜数据
3.2 Ø311.2 mm井眼作业
本井段钻井作业中,几乎每口井都存在不同程度的浅层或深层防碰问题,由于井数较多,无法一一列举,参考其他丛式井防碰技术措施[4-8],现场制定了相应方案,下面以比较有代表性的A39H井为例,介绍在实际施工过程中防碰技术的应用。
3.2.1 A39H井作业背景 A39H井于2009年12月31日开始进行Ø311.2 mm井眼作业,使用内侧槽口,为水平生产井,最终设计井深2 684 m,着陆井深2 445 m,着陆井斜85°,本井Ø311.2 mm井眼作业之前,A平台已完钻13口井,Ø311.2 mm井眼中完着陆13口井,由于完钻及已着陆井较多,所以A39H井于上部防碰问题非常严重,并与另外2口井在深层有碰撞风险。
3.2.2 防碰扫描计算与轨迹调整
(1)浅层防碰。根据防碰扫描结果,A39H与A12H井在272~283 m处最小中心距为0.31~0.32 m;与A17井在248~253 m处最小井间距为1.64~1.67 m;与A19H井在364 m处最小井间距为1.45 m。可看出,A39H浅层防碰风险十分严重,因此进行了浅层三维绕障设计[9-10],结果见下表 2,轨迹如图 2。
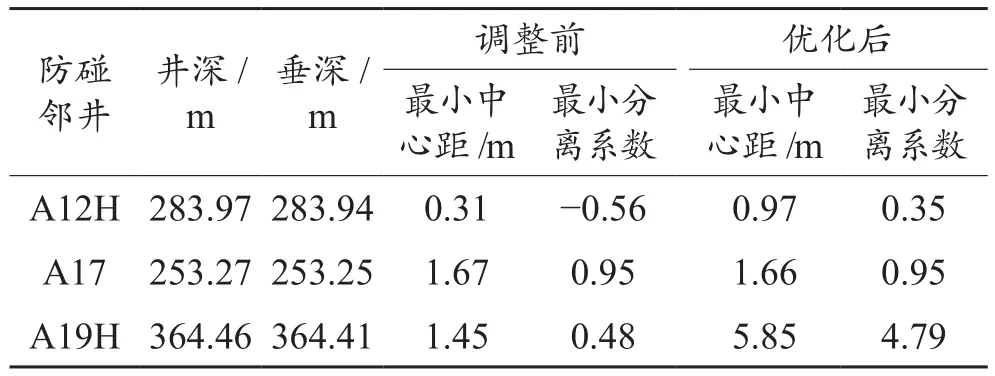
表2 A39H浅层轨迹优化前后防碰扫描结果对比
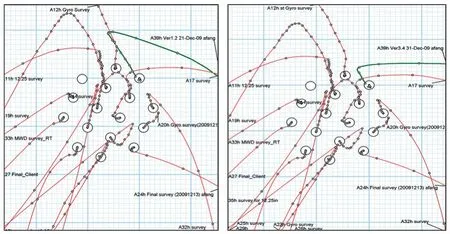
图2 浅层防碰绕障示意图
(2)深层防碰。A39H井与A32H井两井方位基本相同,所以在1 400 m以下井段两井轨迹平行(见图3),垂深相差15 m,针对该情况,在下部增加一个控制点,提前扭方位增加井间距。
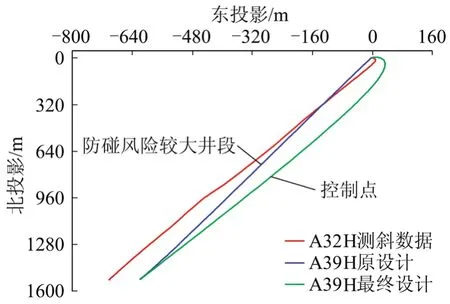
图3 A39H与A32H水平投影图
(3)另外,地层方面因为该井要钻穿馆陶底砾岩(垂深1 100~1 200 m),根据现场施工经验,在该地层钻进很难控制工具面,且滑动困难,所以对原有的控制点做了调整,增加一段稳斜井段,使用马达旋转钻进钻穿馆陶组。
3.2.3 实际作业情况 本井Ø311.2 mm井眼浅层防碰段采用铣齿牙轮钻头+常规马达钻具,二开旋转钻进至一次造斜点220 m。钻井参数:钻压10~30 kN,排量 2 800~3 000 L/min,转速 50 r/min;之后陀螺定向,安全顺利钻过表层防碰段,继续钻进至1 979 m,实际馆陶底砾岩底深1 940 m(垂深1 215 m),钻穿后更换为旋转导向钻具,根据实际测斜结果继续优化轨迹,继续钻进至二开着陆井深2 445 m(斜深 2 445 m,井斜 85°,方位 207.60°,垂深 1 370.87 m)。整个井段钻井作业顺利,未与其他井发生任何浅层或深层碰撞,井身结构满足设计要求。
4 结论
在金县1-1-A平台开发井作业中,通过表层预斜、防碰绕障、陀螺定向等措施技术,配合优选钻具组合、合理钻井参数等辅助措施,形成了一套完整的浅层、深层防碰应对技术措施,成功完成金县1-1-A平台首批钻井任务,为油田的顺利开发打下良好的基础,对金县1-1-A平台后续丛式井的开发以及渤海油田的二次跨越均有着重要的借鉴意义。
[1]黄小龙.表层钻井技术在LD10-1油田的应用[J].天津科技,2009(5):44-45.
[2]李凡,赵少伟,张海,等.单筒双井表层预斜技术及其在绥中 36-1 油田的应用[J].石油钻采工艺,2012,34(S0):9-11.
[3]魏刚,张春琳,邵明仁,等.小井距密集丛式定向井防碰技术[J].内蒙古石油化工,2010(2):99-101.
[4]陈小元,李根奎.CB油田多目标小靶区大斜度定向井丛式井技术[J].钻采工艺,1999,22(5):17-21.
[5]李绪锋.大组丛式井工程设计与施工[J].西部探矿工程,2006(3):74-77.
[6]李洪波,王卫忠.陕北地区丛式井钻井技术[J].石油天然气学报,2005,27(4):624-626.
[7]王卫彬,刘天永.桩139平台海油陆采丛式井钻井技术[J].西部探矿工程,2008(7):201-203.
[8]李培佳,冯志明,李红,等.浅层丛式井钻井工艺[J].钻采工艺,2004,27(2):90-91.
[9]王万庆,田逢军.长庆马岭油田水平井钻井防碰绕障技术[J].石油钻采工艺,2009,31(2):36-38.
[10]张晓诚,刘亚军,王昆剑,等.海上丛式井网整体加密井眼轨迹防碰绕障技术应用[J].石油科技论坛,2010(5):13-17.
(修改稿收到日期 2013-03-03)
Application of anti-collision technology on JX1-1-A platform
SUN Xiaofei, HAN Xueyin, HE Pengfei, DING Xiaojie
(CNOOC Energy Supervision&Technology Company,Tianjin300452,China)
There are some limiting factors in operating of JX1-1-A platform development wells, such as the limited number of notch, concentrated well region, and frequent target adjustment for geological update. Taking account of the upper strata extremely soft,sliding diff i culties in conglomerate layer, and inclination of risers, we designed directional well trajectory and added control points to optimize trajectory for a single well. With the application of preventive oblique, anti-collision around obstacles, gyro direction, segments of deviation for shadow vertical wells, and combined with preferable BHA and reasonable drilling parameters, a complete set of shallow and deep anti-collision technologies was formed. The drilling task of JX1-1-A platform was successfully completed by these technologies, which making a good foundation for the development of the platform and Bohai Oilf i eld.
cluster wells;anti-collision technology;JX1-1-A platform;Liaodong Bay
孙晓飞,韩雪银,和鹏飞,等.防碰技术在金县1-1-A平台的应用[J]. 石油钻采工艺,2013,35(3):48-50.
TE21
B
1000 – 7393( 2013 ) 03 – 0048 – 03
孙晓飞,1982年生。2005年毕业于中国石油大学(华东)石油工程专业,现任辽东湾项目副经理、钻井总监。电话:13502137350。E-mail:sunxf2@cnooc.com.cn。
〔编辑
薛改珍〕